舵机反操纵对于自动驾驶仪稳定性的影响
2013-07-03郑鹍鹏
吕 飞,郑鹍鹏
(中国空空导弹研究院,洛阳 471009)
所谓舵机“反操纵”,是指导弹飞行过程中,作用于舵面上的气动力压心位于舵面转轴之前所出现的操纵情况[1]。此时气动载荷对舵轴产生的铰链力矩与驱动舵面偏转的主动力矩方向相同,从而产生加速舵面偏转的作用。
一般导弹设计时会通过舵轴、舵面、传动机构等的设计,尽量避免反操纵的出现。但由于飞行过程中导弹气动特性十分复杂,很难避免在任何情况下都不会出现舵机反操纵现象,这就需要导弹控制系统具有足够的鲁棒性,保证在这一情形下系统依然能够保持稳定。因此,有必要在控制系统设计时,充分考虑舵机反操纵对系统稳定性的影响。
本文首先给出了舵机的数学模型,然后从模型出发,针对舵机反操纵力矩作用下系统稳定裕度的降低进行了定性与定量分析,给出了舵机反操纵力矩门限的数学描述,最后通过算例进行了验证。
1 舵机数学模型
忽略舵机非线性因素,可得到其简化模型如图1 所示。图1 中变量意义如下:KT—电机力矩系数;K0—比例控制增益;Kf—电位器反馈系数;i—传动机构减速比;R—电机绕组电阻—铰链力矩系数;J—电机转子转动惯量。当>0 时,虚框内的舵机内回路为负反馈,对应于舵机正操纵的情况;当<0 时,舵机内回路为正反馈,对应于舵机反操纵的情况。
由图1 可得到舵机闭环传递函数


根据劳斯稳定判据[2],可得到舵系统稳定的条件即当<0 时,虽然舵机内回路是不稳定的,但由于外环位置反馈回路的存在,只要通过调整控制增益使式(2)得以满足,就可以保证舵系统的稳定。
但舵系统的稳定不代表导弹控制系统稳定,在此将讨论舵机反操纵对于控制系统稳定性的影响。
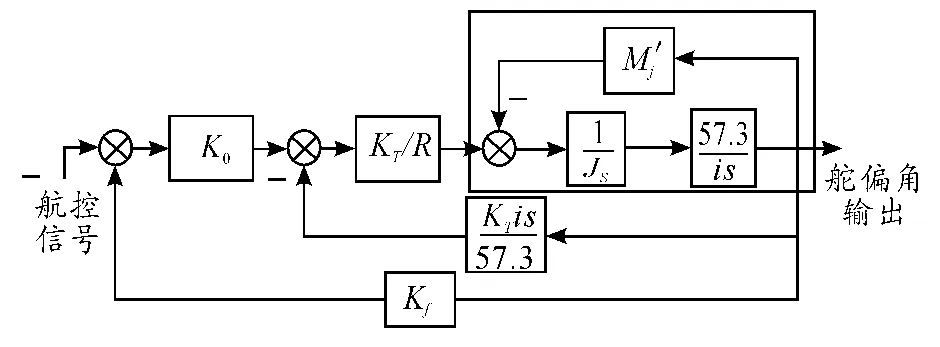
图1 舵机简化模型
2 舵机反操纵对控制系统稳定性的影响
2.1 机理分析
舵机传递函数式(1)的等效标准形式为
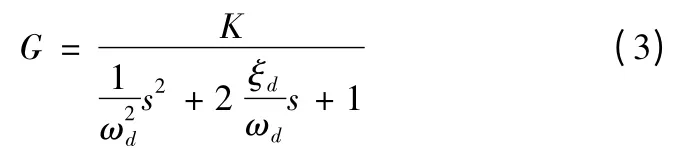
式(3)中:

其中σ=K0KTKf/R 为舵机控制力矩系数,由舵机性能参数决定;r=-/σ 称为舵机反操纵因子,表征了舵机反操纵力矩与其控制能力的相对关系;K、ωd、ξd分别为舵机直流增益、自然频率与阻尼比。
战术导弹多采用三回路过载驾驶仪,控制形式如图2 所示。其设计方法可见文献[3-5]。
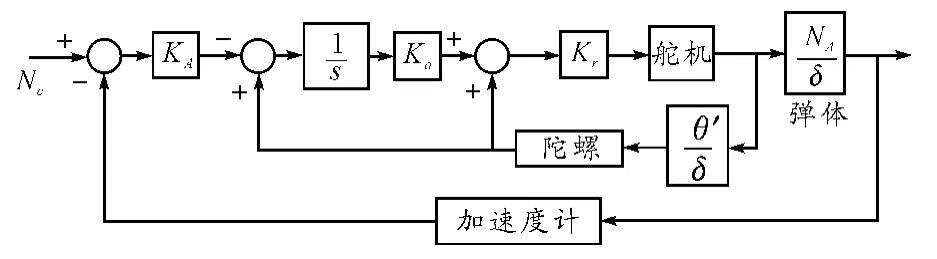
图2 三回路驾驶仪框图
对设计完成的导弹自动驾驶仪进行频域稳定裕度分析。图3 给出了相同设计条件下,舵机分别处于正操纵、基准、反操纵状态的系统开环(在内环舵机处断开)频域特性曲线。从图中可以看出:当舵机出现反操纵时,舵机频带降低,同时其直流增益K >1。直流增益的增大使自动驾驶仪回路开环截止频率ωcr向高频部分移动,舵机频带的降低则使舵机在中高频部分的相移增大。从而导致舵机在ωcr处引起的相移增大,系统相位裕度减小,稳定性下降。
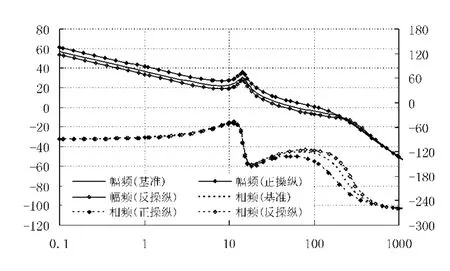
图3 不同舵机操纵状态下自动驾驶仪频域特性
2.2 定量分析
从上面的分析中可以看出,舵机反操纵将导致导弹自动驾驶仪的稳定裕度降低。本节针对这一点进行定量分析。
假设进行导弹自动驾驶仪设计时所采用的基准舵机模型
反操纵下舵机模型变


ωcr、ω'cr分别为两种舵机状态对应的自动驾驶仪开环截止频率。由于系统其余部分不变,且ωcr远大于自动驾驶仪外环带宽与弹体本征频率[5],因此有ω'cr≈Kωcr,将其代入式(7),并综合式(5)、(6)可得

式(8)中λ=ωcr/ωn,即标称状态下自动驾驶仪开环截止频率与舵机自然频率的比值,工程设计时一般取λ 为1/5 ~1/3。由于K=1/(r+1),因此γ 可视为舵机反操纵因子r、阻尼比ξ 与λ 的函数。进一步的分析表明,γ 随r 呈单调递增关系。
在设计自动驾驶仪时,一般要求系统相位裕度在40°以上。因此,为保证控制系统稳定性,舵机反操纵引起的附加相位减小量γ 不应超过40°,考虑到空中可能出现的导弹气动不确定性及非线性等因素,这个限制还应该加严。
若设定舵机反操纵引起的附加相位减小量不超过γlim,则通过式(8)可以得到系统稳定范围内允许出现的最大反操纵力矩因子。由于式(8)为超越方程,对其的求解可通过数值方法完成。在工程上,舵机阻尼比ξ 一般为0.4 ~0.7,λ为1/5 ~1/3,在此范围内不同相位裕度限制对应的反操纵力矩因子门限值如表1 所示。
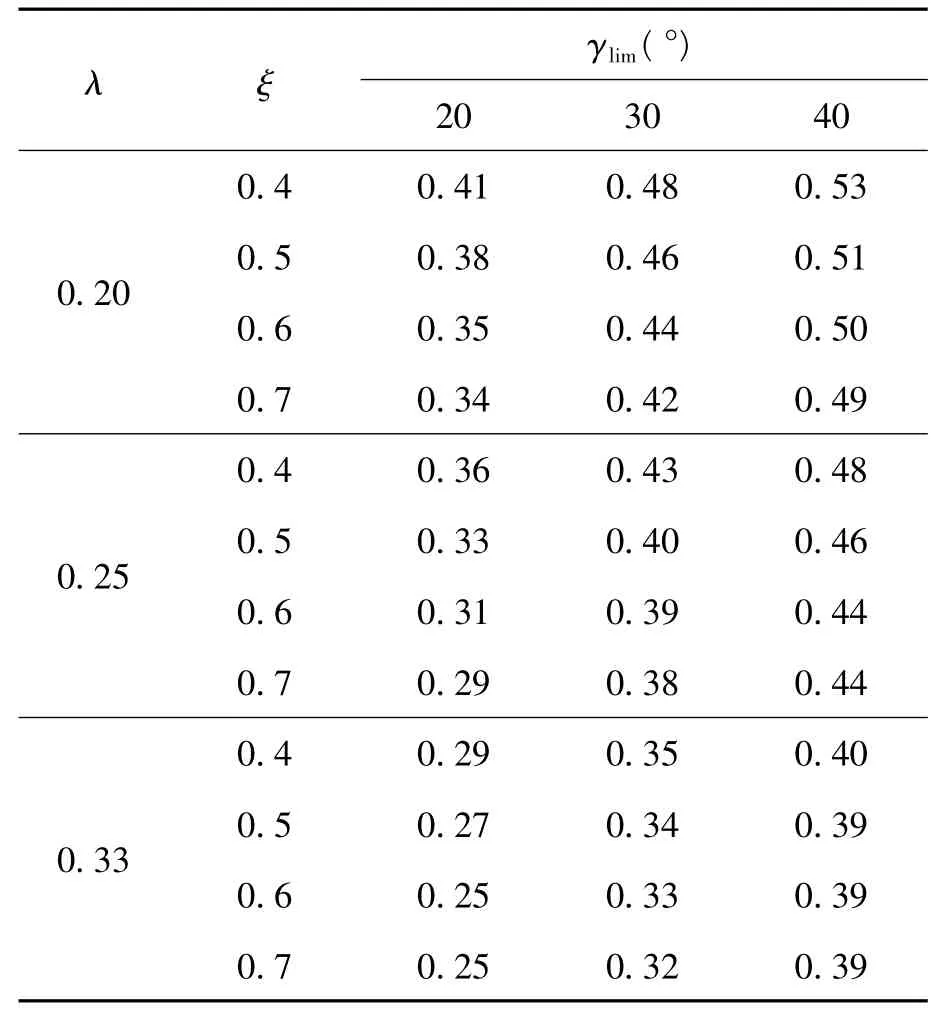
表1 反操纵力矩因子门限
从表1 中可以看出,为保证导弹控制系统的稳定性,舵机反操纵因子应保证在0.5 以下,即满足>-0.5K0KTKf/R。显然,相比舵系统自身稳定性条件式(2),这一要求更加严格。
3 算例验证
以某型导弹为例,其舵机标称自然频率ωn为225 rad/s,阻尼比ξ 为0.4。选取1 个特征点进行自动驾驶仪设计,在设计时取其开环截止频率ωcr约为ωn的1/4。取舵机反操纵力矩因子r 分别为0、0.36、0.5,表2 给出了相应的自动驾驶仪稳定裕度校核结果,图4 则给出了相应的加速度阶跃响应曲线。
从图表中可以看出,当舵机反操纵力矩因子r 为0.36时,自动驾驶仪相位裕度降低了20°左右,其时域响应已呈现振荡趋势;当r 增大至0.5 时,自动驾驶仪相位裕度损失殆尽,系统接近发散。这一结果与2.2 节结论一致。

图4 加速度阶跃响应
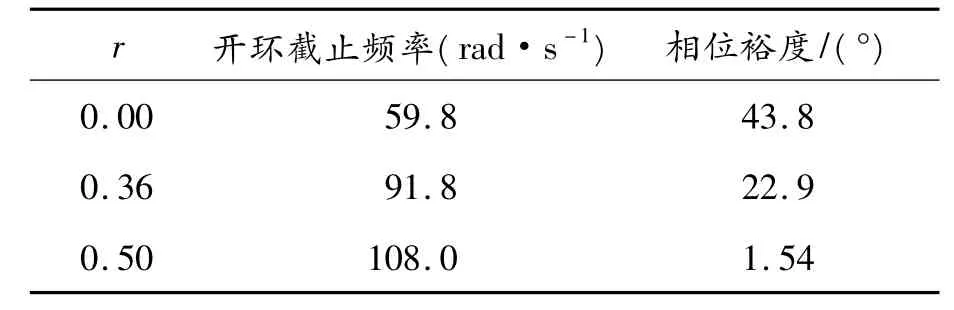
表2 不同反操纵力矩因子下自动驾驶仪稳定裕度
4 结束语
本文从舵机模型出发,分析了舵机反操纵对于导弹自动驾驶仪稳定性的影响,分析表明反操纵引起舵机频带降低,直流增益增大,从而影响自动驾驶仪稳定裕度;进一步给出了舵机反操纵引起附加相位裕度损失的数学表达式,并计算了工程实用范围内舵机反操纵力矩因子的门限值,指出为保证系统稳定性,舵机反操纵力矩因子应小于0.5;最后通过算例验证了结论的准确性。
[1]程云龙.防空导弹自动驾驶仪设计[M].北京:中国宇航出版社,1994.
[2]胡寿松.自动控制原理[M].北京:科学出版社,2001.
[3]温求遒,夏群力,祁载康.三回路驾驶仪开环穿越频率约束极点配置设计[J]. 系统工程与电子技术,2009,31(2):420-423.
[4]杨育荣,李友年,王建琦,等.三回路自动驾驶仪频域设计法[J].航空兵器,2010(6):33-36.
[5]Zarchan P.Tactical and Strategic Missile Guidance(5th Edition)[M]. Washington D C: American Institute of Aeronautics and Astronautics,Inc.,2007.
