双级矩阵变换器驱动IPMSM控制策略的研究
2013-07-02郭旭东黄岗粟梅孙尧
郭旭东,黄岗,粟梅,孙尧
(1.中南大学 信息科学与工程学院,湖南 长沙410083;2.华自科技股份有限公司,湖南 长沙410013)
1 引言
双级矩阵变换器是一种直接交交电力变换装置,具有能量可以双向流通、正弦输入与输出电流、 输入功率因数可控等诸多优良的特性;同时相对于单级矩阵变换器而言,其钳位电路、控制算法简单,易于实现整流级的零电流换流。 但双级矩阵变换器存在最大线性电压传输比相对较低的缺点[1]。
PMSM 的矢量控制系统以其优良的动、 静态性能,逐渐成为高性能交流伺服系统的首选方案[2]。双级矩阵变换器驱动IPMSM 的弱磁控制充分发挥了双级矩阵变换器正弦的输入输出电流、输入功率因数可控等优良特性,并克服了双级矩阵变换器线性电压传输比较低的缺点,拓展了系统的调速范围。 设计了一套基于TMS320F28335 的双级矩阵变换器驱动IPMSM 的矢量控制系统,实现了双级矩阵变换器驱动IPMSM 的高性能交流调速。
2 系统的基本原理与设计
2.1 双级矩阵变换器的调制策略
双级矩阵变换器拓扑结构如图1所示。 整流端S1~S6为双向开关管。 双级矩阵变换器的调制策略类似于普通的双PWM 型变频器,也分为两级控制:其整流端采用PWM 调制,逆变端采用SVPWM 调制。整流端的PWM 调制可以实现双级矩阵变换器输入端的单位功率因数,且输入端的功率因数在一定范围内可调。 文献[3]分析了双级矩阵变换器的调制策略,本文不再赘述。

图1 双级矩阵变换器的拓扑结构Fig.1 Topology of two-stage matrix converter
2.2 IPMSM 的控制策略
2.2.1 IPMSM 的数学模型
规定各相绕组电压、电流、磁链的正方向符合电动机惯例和右手螺旋定则,并将IPMSM 的转子磁场方向定向于同步旋转坐标系的d 轴,q轴超前d 轴90°,Clarke 变换的系数取2/3,得到IPMSM 的数学模型[4]如下:

式中:ud,uq,id,iq,Ψd,Ψq分别为d,q 轴的电压、电流、 磁链;rs为定子电阻; Ld,Lq分别为d,q 轴等效电感;ωe,ω 分别为转子电气角速度和转子机械角速度;Ψf为转子永磁体磁链;np为磁极对数;J为电机的转动惯量;Te,TL分别为电机的电磁转矩和负载转矩。
2.2.2 IPMSM 的控制策略
IPMSM 矢量控制的方法主要有:id=0 控制,cos θ=1 控制,恒磁链控制,最大转矩/电流控制,弱磁控制,最大输出功率控制等。
当转速较高、负载较重时,采用id=0 控制将使得双级矩阵变换器逆变端过调制,输出电压畸变,影响系统的调速性能。 所以,当双级矩阵变换器逆变端将要出现过调制时采用弱磁控制,以拓宽系统的调速范围。
由式(2)可知:调节id和iq可以改变定子磁链。减小d 轴电流分量id与减小q 轴电流分量iq,都可以达到减弱磁通的目的。 由式(3)可知:id=0,减小iq,Te将减小,降低了电机在弱磁区的带载能力。 对于IPMSM 有Ld<Lq。 由式(3)可知:当iq不变,减小id时,Te将会增大,提高了系统在弱磁区的带载能力。 因此,采用减少d 轴励磁电流分量的方法来实现系统的弱磁控制。
双级矩阵变换器的最大线性输出电压为umax。 通过计算得到输出的定子电压为uref。 如果umax≥uref,说明系统还工作在线性调制区,系统采用id=0 控制。 如果umax<uref,说明系统将工作在过调制区,系统需采用弱磁控制。 此时,umax与uref的误差信号经PI 调节器来调节d 轴励磁电流分量的给定idref。 idref可表示为

式中:kp,ki为PI 调节器的系数;uα,uβ为两相静止坐标系下的定子侧给定电压。
式(5)可知:当umax<uref时,会调节出一个负的idref去减弱Ψd。 由式(1)可知:在相同负载和转速条件下减少Ψd,就会减少uq,最终减小uref,使得umax≥uref,保证系统工作在线性调制区,保证系统拥有良好的调速性能。
2.2.3 系统的控制结构
双级矩阵变换器驱动IPMSM 弱磁控制的结构框图如图2所示。 由图2可知:矢量控制不是电磁转矩的直接控制,而是通过控制定子电流间接的控制电磁转矩,进而控制电机的运动规律。

图2 系统的控制结构框图Fig.2 Structure block diagram of the control system
2.2.4 系统控制策略的改进
一套PI 参数难以满足电机在全速范围内静态性能的要求。 为了解决这一问题,先通过实验调试,得到电机在不同转速区较优的PI 参数,然后控制程序根据给定转速的不同而改变PI 参数,以满足电机在全速范围内稳态性能的要求。
在阶跃给定转速的情况下,PI 控制器易出现积分饱和,导致转速超调。 文献[5]提出使用非线性PI 来改善调速性能。然而,复杂的非线性PI 控制律难以应用于工程实践,简单的非线性PI 控制律的控制效果又不理想。 在仿真和实验调试过程中,将转速给定改为斜坡给定,并结合分段PI 参数法后,系统的调速性能得到了极大的改善。
3 仿真研究
利用Matlab 仿真工具搭建了系统的仿真模型,以验证本文所提方案的可行性与有效性。 仿真参数为:三相输入LC 滤波器的滤波电感Lf=0.6 mH,滤波电容Cf=30 μF;PMSM 参数为:rs=2.5 Ω,Ld=8.6 mH,Lq=10.4 mH,极对数为2;开关频率10 kHz。 仿真波形如图3、图4所示。
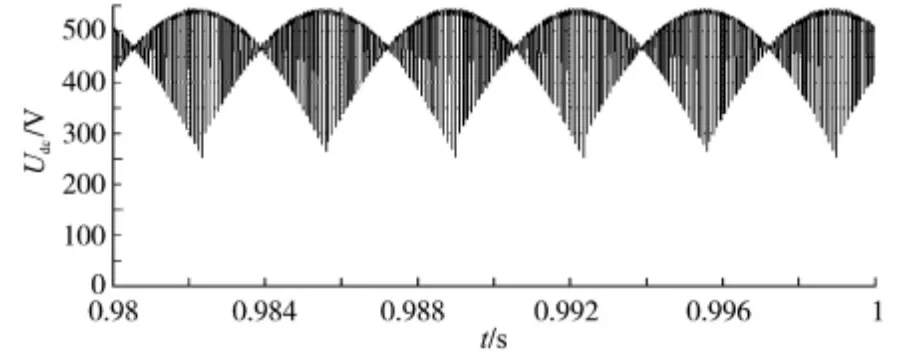
图3 双级矩阵变换器直流电压的仿真波形Fig.3 DC voltage simulation waveform of two-stage matrix converter

图4 n=1 750 r/min 时定子侧Uuv和Iu仿真波形Fig.4 Simulation result of Uuvand Iuwhen speed is 1 750 r/min
图5为转速阶跃给定时的电机转速波形。图6为转速斜坡给定加分段PI 参数法时的转速波形。

图5 阶跃给定转速时的转速仿真波形Fig.5 Simulation result of speed when speed is step-input

图6 转速斜坡给定+分段PI 时的速度仿真波形Fig.6 Simulation result of speed when speed is slope given and PI parameters are sectioned
对比图5和图6可知,采用转速斜坡给定和分段PI 参数法后,IPMSM 转速的超调量和稳态误差明显减少;验证了本系统的可行性以及改进方法的有效性。
4 实验研究
本文设计了如图7所示的实验系统。 双级矩阵变换器的整流端由12 个分立式IGBT 每2 个共发射极组成的6 个双向开关管搭接而成;逆变端由PM75RLA120 构成。 IPMSM 参数为:额定功率1.5 kW、额定转速1 500 r/min,其余参数与仿真参数一致。 三相输入LC 滤波器的参数与仿真参数一致。 TMS320F28335 和EP2C8T144C8N 完成系统控制算法的计算。

图7 系统硬件结构框图Fig.7 Hardware structure diagram of the system
图8为双级矩阵变换器中间直流电压实验波形。 图9为转速阶跃给定加id=0 控制时的转速波形。图10为转速斜坡给定、分段PI 参数与弱磁控制相结合时的转速波形。 对比图9和图10可知,采用分段PI 参数法加转速斜坡给定加弱磁控制后,转速调节过程平滑、无超调、稳态误差小;而采用id=0 控制加转速阶跃给定时,电机的转速超调大、易失控,当转速控制到1 750 r/min 时,转速震荡严重。 图11为id=0 控制且转速为1 750 r/min时Uuv和Iu的波形。 图12为弱磁控制且转速为1 750 r/min 时Uuv和Iu的波形。 对比图11和图12可知,采用id=0 控制将转速调节到1 750 r/min时,系统出现过调制,输出电压畸变,转速震荡严重;采用弱磁控制后,速度控制到1 750 r/min 时的转速很平稳且输出电压没有畸变。 实验结果充分验证了本文所提控制方案的有效性。
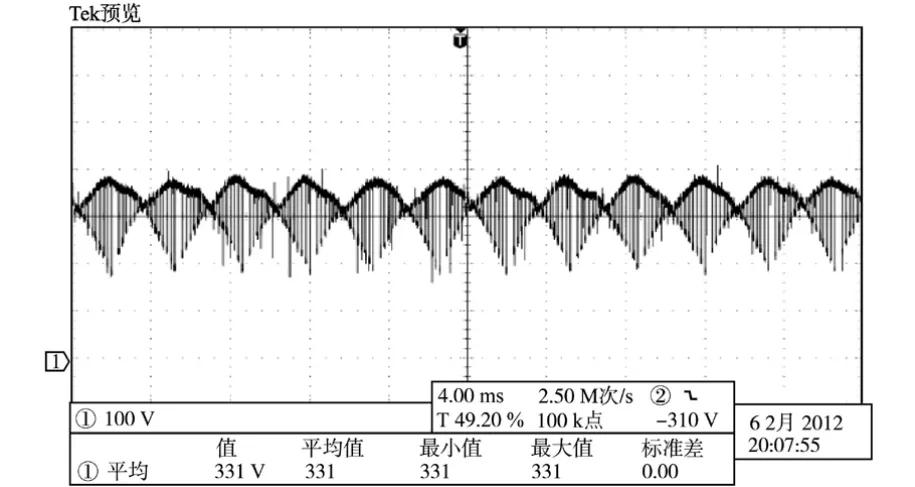
图8 双级矩阵变换器中间直流电压Udc的实验波形Fig.8 DC voltage Udcexperiment waveform of two-stage matrix converter
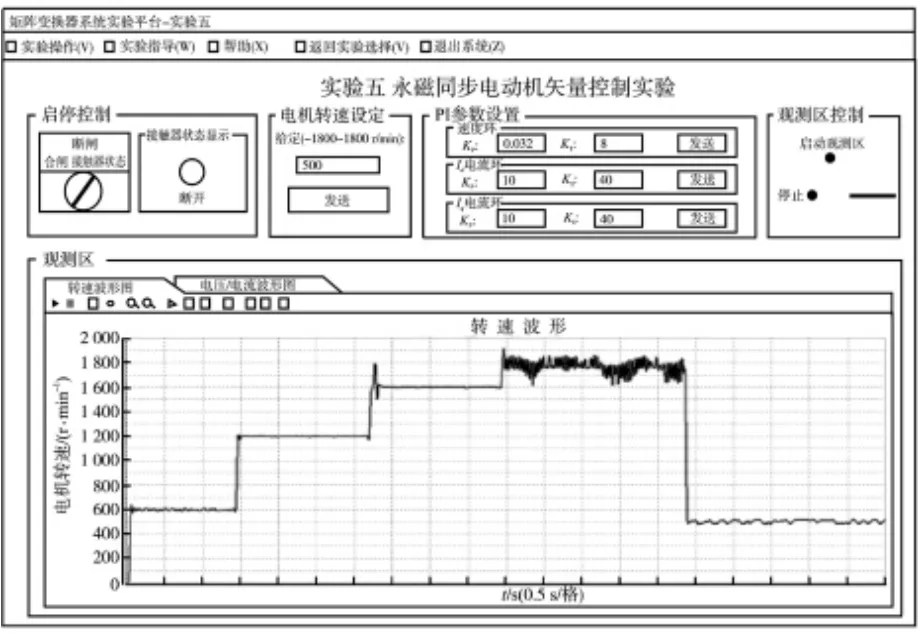
图9 转速阶跃给定+id=0 控制时的转速实验波形Fig.9 Experimental result of speed when speed is step-input and idis equal to zero

图10 转速斜坡给定+分段PI+弱磁控制时的转速实验波形Fig.10 Experimental result of speed when speed is slope given,PI parameters are sectionedandfield-weakeningcontrolisused
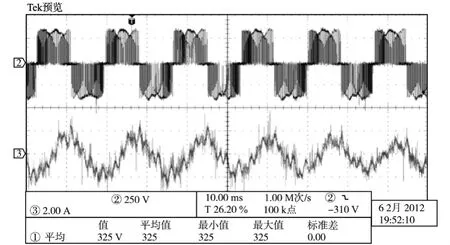
图11 id=0 控制且n=1 750 r/min 时定子侧的Uuv和Iu实验波形Fig.11 Experimental result of Uuvand Iuwhen speed is 1 750 r/min and idis equal to zero

图12 弱磁控制且n=1 750 r/min 时的Uuv和Iu实验波形Fig.12 Experimental result of Uuvand Iuwhen speed is 1 750 r/min and field-weakening control is used
5 结论
双级矩阵变换器驱动IPMSM 的自动弱磁控制不仅充分利用了双级矩阵变换器的优良性能,而且很好地弥补了双级矩阵变换器线性电压传输比较低的不足,拓宽了系统的调速范围。 针对IPMSM 阶跃给定转速时,转速超调大、震荡厉害、易失控的问题,采用转速斜坡给定和分段PI 参数法后系统的调速性能得到了极大的改善。 仿真和实验结果充分验证了本文所提方案的可行性与有效性。
[1] 粟梅,李丹云,孙尧,等.双级矩阵变换器的过调制策略[J].中国电机工程学报,2008,28(3):47-52.
[2] 吴茂刚.矢量控制永磁同步电动机交流伺服系统的研究[D].杭州:浙江大学,2006.
[3] 粟梅,许新东,李丹云,等.双级矩阵变换器驱动异步电机的特性分析[J].中南大学学报:自然科学版,2005,36(4):658-663.
[4] 刘军.永磁电动机控制系统若干问题的研究[D].广州:华南理工大学,2010.
[5] 刘见,粟梅,孙尧,等.基于双级矩阵变换器的永磁同步电机矢量控制[J].电力电子技术,2010,44 (11):65-68.
