基于MATLAB的交流拖动仿真实验室设计*
2013-06-28杨振兴李俊锋
杨振兴,张 亚,李俊锋
(中北大学 机电工程学院,山西 太原 030051)
1 引言
虚拟仿真实验技术是利用软、硬件的结合,取代传统的常规实验仪器设备,在计算机或计算机网络上进行模拟、仿真技术的特点,其实际应用于各种实验的技术。虚拟教学和虚拟实验,由于虚拟现实在理工科的教学中应有广大作为,尤其在建筑、机械、物理、化学等学科有着质的突破。
建立一个完整的虚拟现实系统是成功进行虚拟现实应用的关键,而要建立一个完整的虚拟现实系统,首先是选择实际可行的虚拟现实系统解决方案。GUI是MATLAB软件中专门用于图形用户界面(GUI)程序设计的快速开发环境,是使用图像、输入文字、带图表屏幕的计算机界面,可取代许多键盘的功能。SIMULINK是MATLAB软件的重要工具箱之一,主要功能是实现动态功能的建模、仿真与分析,可在实验系统制作完成之前预先进行仿真和分析,以使系统达到最佳性能效果[1]。
笔者采用MATLAB/GUI(图形用户界面)设计交流电动机调速的仿真实验系统,以弥补高校实验设备缺乏,也可以起到辅助教学的作用。MATLAB软件中包括了图形用户界面编辑GUI,改变了以前单一的在指令窗口通过文本形的指令进行各种操作的状况。
2 几种典型模型的SIMULINK仿真
对异步电动机的机械特性进行描述,从而引出能够改变其机械特性的因子。异步电动机运行中的主要问题包括起动、调速和制动,根据适用场合不同,异步电动机也有多种起动方法、调速方法和制动方法。
2.1 异步电动机机械特性的MATLAB仿真
定义:指在定子电压、频率和其他参数固定,而负载不断变化时,电磁转矩与转速(或转差率)之间的函数关系。两者的关系如下列公式所示[2]。

式(1)中,T=f(s)即是异步电机的机械特性,当转子电阻,定子电压或频率等参数发生变化时,可得到对应不同参数时的机械特性。
式(2)表明异步电动机转速与定子频率、转差率及极对数有关,调节这3个参数即可改变转速。异步电动机机械特性仿真结果如图1所示。

图1 异步电动机机械特性仿真
2.2 转子回路串电阻减压起动模型
建立该仿真模型,可采用SIMULINK提供的仿真模块,如交流电源、电压测量、异步电动机、电机测量等。其中,异步电动机模块位于[Power System]库中,其仿真模型如图2所示。
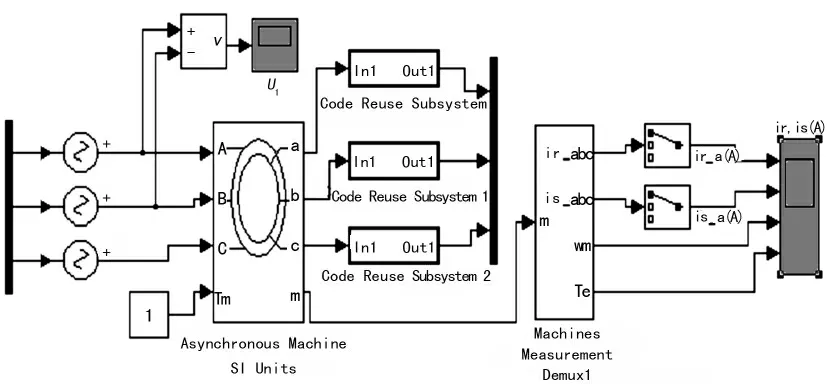
图2 转子串电阻减压起动仿真
其仿真结果如图3所示,被测量依次是转子电流、定子电流、转速及转矩。
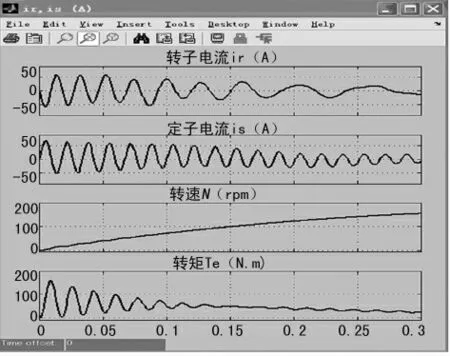
图3 异步电动机参数设置
三相异步电动机起动时,串联电阻值必须大小合适,其目的是为了增加起动转矩,减小起动电流,实现快速起动。若电阻阻值过大,则可能适得其反。
2.3 调压调速模型
三相异步电动机调压调速属于改变转差率调速,由于此时电机内部旋转磁场转速不变,因此电机的转速变化范围小。而且电机通常额定工作电压一定,因此三相异步电机调压调速的变压范围也会受到限制。该仿真模型和直接起动完全相同如图4所示[3]。仿真参数设置如图5所示,仿真结果如图6所示。
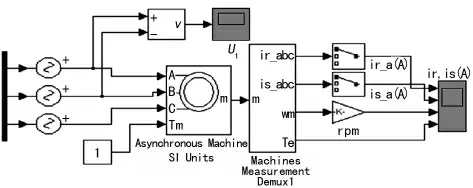
图4 调压调速运行仿真模型

图5 仿真参数设置

图6 调压调速仿真结果
需要注意的是,三相异步电动机调压调速模型运行后遇到初始值设置问题时,首先运行模型,得到稳态值,再将这些稳态值设置为下一次运行前的初始。修改模型输入并运行,则模型将在最新初始值(也就是上一次运行的稳态值)的基础上重新运行并实现状态改变。这类仿真方法,对于状态需要变化的模型非常适合。
2.4 单向反接制动
反接制动简单、制动效果较好,但必须有自动控制装置控制电机,在转速接近0时将电机与电源断开。单向反接制动模型与调压调速模型相同如图4所示。
反接制动与反转的不同之处在于,反接制动最终要使电机停车,而反转则要在电机转速为0后继续改变方向[4]。如果仿真时间过长,会出现电机反转的现象,因此需要适当限制仿真时间,在电机转速接近0时停止仿真过程。仿真结果如图7所示。

图7 反接制动仿真结果
三相异步电动机的转动方向有旋转磁场的转动方向决定。旋转磁场的转向取决于定子绕组通入的三相交流电的相序。因此要改变三相异步电动机的转动方向很容易,将电动机输入电压电源的三根电源线中任意两根对调一下,则通过定子绕组的电流相序改变,旋转磁场方向改变,电动机的转速将迅速减小为0并及时改变转向。
从仿真结果来看,模型重新开始运行后,电磁转矩瞬间变成负值,经过渡后逐渐趋近于0,但仍然略小于0。如果认为负载转矩始终是负转矩,则电磁转矩应与负载转矩相反,且值为正才对。其实这种解释有误,因为无论电机转向如何,负载都是阻转矩,即负载转矩都应该与电机转向相反;电机改变状态之前,假设转向为顺时针,则负载转矩逆时针,电磁转矩顺时针。电机状态改变后,电磁转矩首先改变方向,即改变为逆时针,而此时电机转向来不及变化,仍然为顺时针,负载转矩继续保持逆时针方向,故电机转速迅速减小至0,此过程中电磁转矩与负载转矩同方向。然后,电机改变方向为逆时针,与电磁转矩同方向,而负载转矩则变成逆时针,直到电机进入稳定运行状态。假设顺时针为正,则逆时针为负,与仿真结果吻合。
3 仿真实验室的建立
本节将利用GUI界面设计实现实验目标如下:
(1)建立一个电机类型子菜单(listbox1)窗口,列出电机类型供选择。
(2)选择电机类型后,通过电机特性下拉菜单(listbox2)选择电机的实验内容。
(3)选择实验内容后,通过按键可打开该实验对应的仿真模型并运行。
(4)通过按扭关闭用户界面或返回主界面。
根据设计目标,系统界面包含1个文本框(名称)、2个列表框(电机类型框、实验内容框)、2个按钮(运行和退出)。编辑主界面见图8。在主界面中,要对StaticText1、Listbox1、Listbox2、PushButton1 Push-Button2控件进行初始化设置。

图8 编辑主界面
(1)StaticText1静态文本框:String:交流拖动仿真实验室。
(2)电机类型框(Listbox1):设置BackgroundColor文本框颜色与背景图片一致;Max设置为[1];Min设置为[0];Value设置为[1];String输入:单相异步电动机,三相异步电动机(绕线式异步电动机、鼠笼型异步电动机),同步电动机等。
(3)实验内容框(Listbox2)。设置使Max[1];Mini-0];Value[1];String输入;机械特性;转子串电阻减压起动;调压调速;矢量控制变频调速;单向反接制动;退出按钮(btnexit):Callback[close];string[退出];Tag[btnexit]。
提示对话框设计:在运行程序时,常会出现正在运行的程序错误或者程序运行完毕要退出的情况。为避免错误操作引起的错误关闭,需要建立一个子GUI。当点击关闭或退出按钮时,系统即弹出提示对话框,需征求确认信息后方可关闭运行窗口。提示对话框设计如图9所示。

图9 退出提示对话框
回调函数如下:
%---Executes on button press in RUN.
function Exit_Callback(hObject,eventdata,handles)
%hObject handle to RUN(see GCBO)
%eventdata reserved-to be defined in a future version of MATLAB
%handles structure with handles and user data(see GUIDATA)
继续插入以下函数:
%Get the current position of the GUI from the handles structure
%to pass to the modal dialog.
pos_size=get(handles.figure1,'Position'.
%Call modaldlg with the argument'Position'.
user_response=modaldlg('Title','guanbi');
switch user_response
case{'No'}
%take no action
case'Yes'
%Prepare to close GUI application window
delete(handles.figure1
end
4 结论
笔者依托MATL AB强大的计算功能和丰富的图形处理功能,基于MATLAB/GUI设计交流电机仿真实验系统,开发效率高且方便建立人机交互的仿真平台,便于演示及交互操作,对研究参数变化对电机性能的影响,以及进一步丰富教学手段,引导学生进行研究性学习方面有很好的辅助作用。对初学者而言,只要掌握了界面设计的方法,结合MATALB内置的各种库函数SIMULINK中的各种工具就可以迅速开发出满足各种需要的界面友好的仿真平台。
[1] 顾绳谷.电机及拖动基础[M].第4版.北京:机械工业出版社,2009.
[2] 丁学文.电力拖动运动控制系统[M].北京:机械工业出版社,2007.
[3] 邓 薇.MATLAB函数速查手册[M].北京:人民邮电出版社,2008.
[4] 潘晓晟.MATLAB电机仿真精华50例[M].北京:电子工业出版社,2007.
