DEM支持下WorldView-2影像的单片定位
2013-06-26董胜光郭云开
张 柯,董胜光,郭云开,彭 悦
(1.湖南省第二测绘院,湖南 长沙 410019;2.长沙理工大学,湖南 长沙 410004;3.湖南省国土资源厅,湖南 长沙 410004)
定位问题是卫星遥感影像应用的关键问题,应用摄影测量方法来解决目标定位问题时,人们往往首先想到的是用立体摄影测量技术。从本质上来说,利用摄影测量技术确定物方目标空间位置的方法可分为2大类,一类是利用两空间直线相交决定一点的原理进行定位,立体摄影测量的方法属于此类;另一类是利用直线与面相交决定一点的原理进行定位,基于DEM进行单片定位属于此类。借助DEM进行单张相片目标定位,具有简单、方便、快捷的特点,最早用于地形图的局部修测和侦察目标的确定,但由于大规模DEM的缺乏,这一方法一直未形成实用系统投入生产[1-3]。随着基础测绘事业的发展,我们已经拥有覆盖全球的SRTM(90 m)、ASTER GDEM(30 m)、覆盖全国大部分地区的1∶10 000 DEM数据以及局部地区更高精度的DEM数据,而且DEM是一种稳定性较高的地面起伏信息资料,一旦建立,变动甚小,可以在很长的时期内使用,这为单片定位提供了有力的条件[4-6]。WorldView-2卫星是高分辨率遥感影像发展的一个重要里程碑,采用三线阵CCD扫描传感器,支持严格物理成像模型和有理函数成像模型,拥有空间分辨率高、单景影像覆盖面积大、成像速度快等诸多优点,探索DEM支持下WorldView-2为代表的高分辨率遥感卫星的单片定位具有十分重要的意义[4,6]。
1 单片定位原理与过程
Worldview-2卫星有严格物理和有理函数2种成像模型,基于2种成像模型,Worldview-2也有2种单片定位方法[7-10]。
1.1 基于严格物理模型的单片定位
基于严格物理模型对WorldView-2影像进行地面目标点单片定位的原理比较简单,其实质就是根据像坐标(x,y)和相应的地面点的Z坐标以及相片的内、外方位元素,确定地面点的平面坐标(X,Y)。在计算过程中,可以根据己有的DEM,先给出该地面点的近似高程值,然后采用迭代法计算出其精确高程值和平面坐标值,其具体计算步骤如下:
1)给定Z值的初值Z0(可用该地区的平均高程);
2)基于元数据文件(.IMD)、几何标定文件(.GEO)、姿态文件(.ATT)以及星历文件(.EPH),直接读取主距f、CCD第一个像元在像空间坐标系中的坐标(x0,y0)、像素大小depitch,内插求取CCD线阵遥感影像的外方位元素,即二阶多项式模型的18个参数,包括位置及姿态的初始值、变化速率 以及二次项系数;
3)对CCD线阵遥感影像严格物理模型进行反变换,得到反变换之后的共线方程;
4)量测影像上某一点的像平面坐标(x,y),将(x,y,Z0)代入严格物理模型的反变换函数,求解(X1,Y1);
5)根据(X1,Y1),基于GDEM内插求取目标点DEM的初始值Z1;
6)重复步骤 4)、5),直至(Xi−Xi-1)和(Yi−Yi-1)或(Zi−Zi-1)之差小于给定的限差。
1.2 基于有理函数模型的单片定位
利用有理函数模型进行单片定位的原理与基于严格物理模型进行单片定位的原理基本相似,都是通过迭代的方式实现地面目标点的定位,其实质都是只要知道了地面点的高程,即可根据影像坐标与地面三维坐标之间相应的函数关系,算出该地面点的平面坐标,得到三维坐标,完成三维重建。具体步骤如下:
1)给定Z值的初值Z0(可用该地区的平均高程);
2)根据泰勒公式,将有理函数模型进行线性化展开,量测影像上某一点的像平面坐标(x,y),将(x,y,Z0)和RPC参数代入有理函数模型,求解(X1,Y1);
3)利用的平面坐标(X1,Y1),基于DEM数据内插出目标点的高程Z1;
4)将地面点 (X1,Y1,Z1)代入线性化有理函数模型中,迭代求解出(X2,Y2);再由(X2,Y2)内插出新的Z值Z2,将(X2,Y2,Z2)再代入线性化有理函数模型计算,得出更新的平面坐标值(X2,Y2),如此反复,直到(Xi−Xi-1)和(Yi−Yi-1)或(Zi−Zi-1)之差小于给定的限差。
2 试验研究
2.1 试验方案
为了检验DEM支持下WorldView-2影像单片定位的精度,选取了1套WorldView-2区域影像(包括前视、下势、后视影像)以及该地区1幅1∶10 000标准分幅的DEM 作为试验数据,开展3组试验,如表1所示。影像拍摄时间是2010年1月24日,覆盖约为220 km2,东西方向上跨越为13.4 km,南北方向上跨越为16.1 km(正常的幅宽是16.4 km), 区内地形涵盖平地、丘陵和山区。在ERDAS视窗中打开WorldView-2影像,依据均匀分布原则,在图幅内选取30个地物点,读取地物像点坐标,并采用GPS快速静态测量方法对这些地物点进行野外实测,部分用作相片控制点,其他全部用于单点定位的精度评定。在MatlabR2007环境下,按照单片定位的原理与过程,编写程序SingleOrientation,该程序用于实现DEM支持下,基于严格物理模型或有理函数模型的单景WorldView-2影像的地面目标点三维坐标计算。试验组1和2通过SingleOrientation程序实现,试验组3在ERDAS LPS2010中进行。
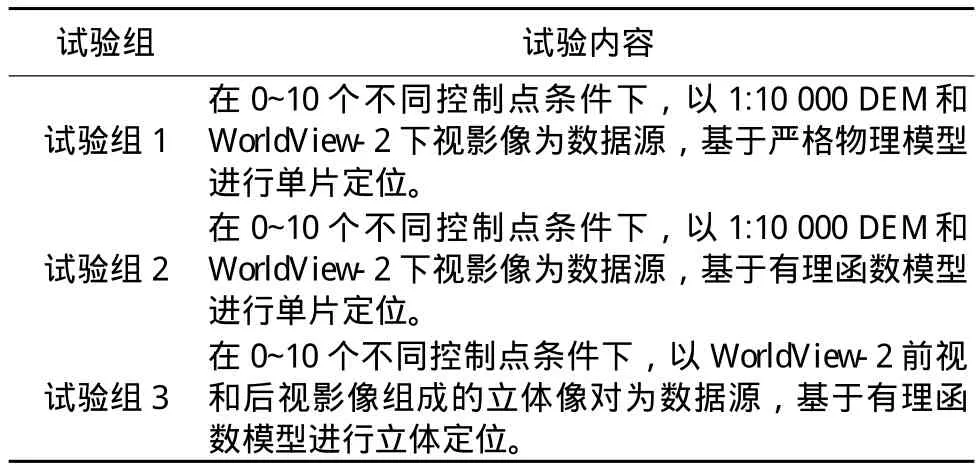
表1 试验方案汇总表
2.2 试验结果
按照表1方案进行试验,试验后统计各次试验组中检查点的定位精度,结果如表2所示,并分别制作控制点数量与平面定位中误差和高程定位中误差之间注:试验方案序号“0”表示0个控制点,“1”表示1个控制点,其他试验名称依次类推。的关系图,如图1和图2所示。
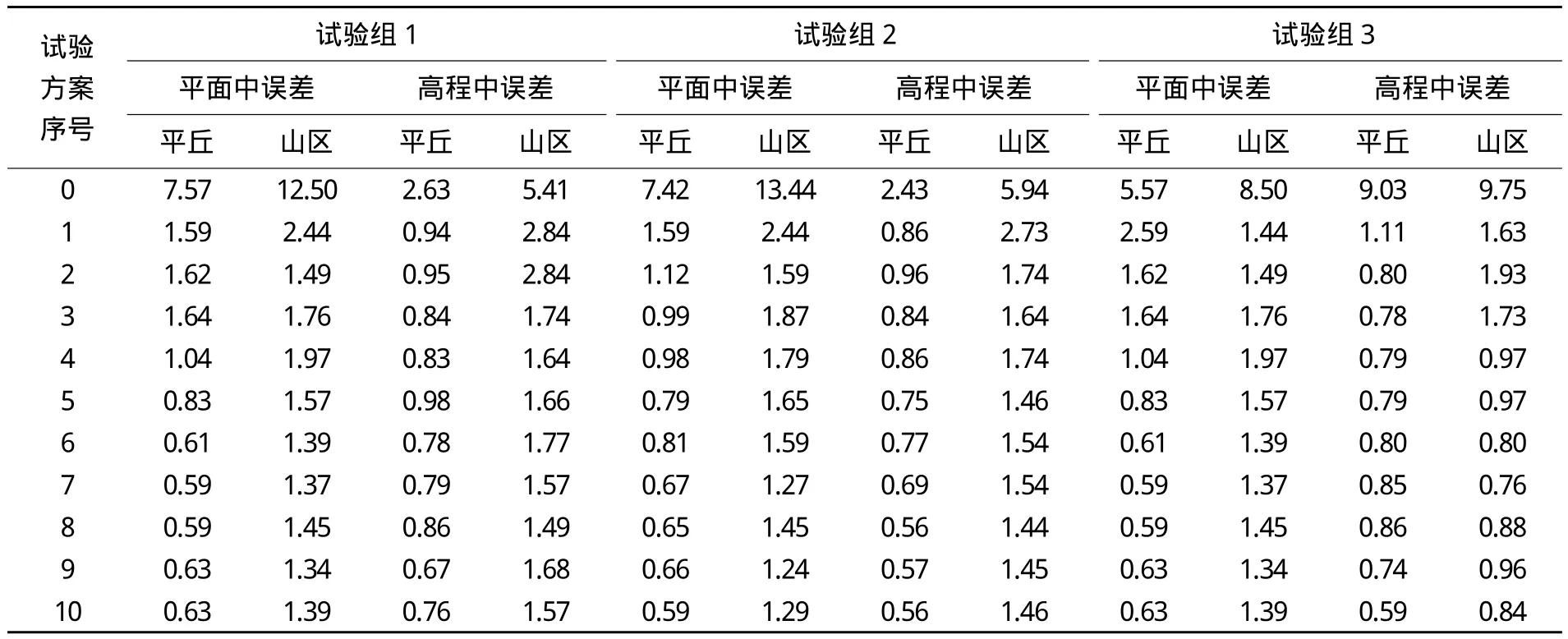
表2 定位精度统计表/m

图1 平面定位中误差与控制点数量关系图
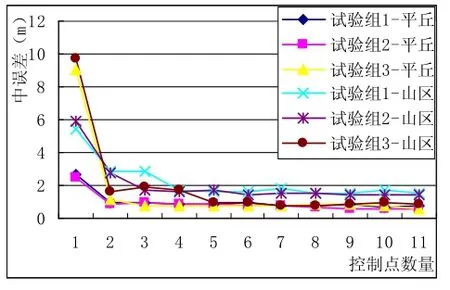
图2 高程定位中误差与控制点数量关系图

表3 规范定位限差统计表/m
结合表3中的规范限差,分析表2、图1和图2可知:
1)从整体来看,1∶10 000 DEM支持下进行WorldView-2影像单片定位,无论采用严格物理模型还是采用有理函数模型,无论是平地还是山区,当增加1个控制点时,定位的精度将大幅度上升,这表明WorldView-2影像单片定位的误差具有系统性;随着控制点数量的增加,平面定位精度呈非线性规律逐渐优化;而高程定位精度则基本维持在1.5 m左右,这表明单片定位的高程精度主要由支持的DEM精度决定,地面控制点对平面精度的影响较大,而对高程精度的影响相对较小。
2)采用严格物理模型进行单片定位时,平面定位精度在平丘和山区分别最高可达0.59 m和1.34 m,在没有控制点条件下,单片定位精度能够满足1∶50 000 成图的要求,当增加1个控制点时,定位精度能满足1∶10 000 成图的要求;当控制点数量增加2个时,定位精度满足1∶5 000 成图的要求,当继续增加控制点时,定位精度上升的幅度不大。
3)采用有理函数模型进行单片定位时,其定位精度与采用严格物理模型进行定位的精度在整体上基本一致。
4)与立体定位相比,在没有控制点支持的情况下,单片定位由于有DEM的支持,其定位精度优于立体定位的精度,当拥有控制点支持时,单片定位的精度在平面上与立体定位的精度基本一致,随着控制点的增加,定位精度不断提高,但在高程上单片定位的精度较立体定位的精度差,随着控制点数量的增加,高程精度很大程度上受到DEM质量的影响,在1.5 m上下浮动,呈现一定的稳定性。
5)现有资料表明,DEM支持下普通航片进行单片定位时,常常由于地面坡度与物点的投影方向与竖值方向夹角之和大于等于90°,迭代计算无法收敛。而在本次试验计算过程中,没有出现该现象,这主要是由于WorldView-2下视影像属于近似垂直摄影,且成像轨道高度远远大于普通航拍时的航高,从而大大降低了“地面坡度与物点的投影方向与竖值方向夹角之和大于等于90°”这一现象发生的概率。
3 结 语
在DEM支持下,以WorldView-2为代表的高分辨遥感影像的单片定位技术是一种简单易行、便于推广的简易方法,避免了立体摄影测量中空中三角测量、核线匹配等繁琐的工序,将大大提高测图的效率和数据更新的速度,同时也节省了购买立体像对的成本,在基础测绘更新和侦察目标的确定等项目中具有巨大的实际应用价值。
[1]王之卓. 摄影测量原理[M].武汉: 武汉大学出版社,2007
[2]张永生,巩凡超. 高分辨率遥感卫星应用:成像模型、处理算法及应用技术[M].北京: 科学出版社, 2004
[3]Jen-Jer Jaw, Yi-Shen Wu. Control Patches for Automatic Single Photo Orientation [J]. Photogrammetric Engineering & Remote Sensing, 2006, 72(2):151-157
[4]Digital Globe Company. DigitalGlobe Core Imagery Products Guide[EB/OL].http://www. digitalglobe.com/file.php/811/DigitalGlobe_Core_ Imagery_Products_Guide.pdf.2010
[5]Gerry Mitchell. PhotoSat WorldView-2 Stereo Satellite DEM Comparison to a LiDAR DEM over the Garlock Fault in Southeast California[EB/OL]. http://www.digitalglobe.com/downloads /case_studies/ Case_Study_WV2_LIDAR_Comparison.pdf, June 2010
[6]江恒彪,关鸿亮,曹天景.WorldView-2核线影像立体测图研究[J].测绘通报,2009(5):32-34
[7]王伟玺. 基于广义立体像对的三维重建方法研究[D]. 阜新:辽宁工程技术大学,2006
[8]刘军,王冬红,毛国苗.基于RPC模型的IKONOS卫星影像高精度立体定位[J].测绘通报,2004(9):1-3
[9]刘世杰. 高分辨率卫星遥感影像成像模型与定位技术研究[D].上海:同济大学,2008
[10]程新文,赖祖龙. 基于DEM的单张数字影像测量精度研究[J].测绘学院学报,2000(4):1-4
[11]李雯,肖凯,刘文. 应用单张相片解析法实现测绘图像实时定位[J].航空学报,2002,23(l):82-84
[12]程晓庆,孙建.SPOT5 HRG 严格物理模型转换成RPC 模型的方法[J].地理空间信息,2008,6(4):107-109
[13]胡艳,张治清,张少佳,等. 高分辨率遥感影像正射纠正的DEM修复技术[J].地理空间信息,2011,9(4):81-83