基于卡尔曼滤波的倒立摆系统角度信号处理研究
2013-06-25周辉权
周辉权,孙 华,冀 渊,丁 伟
(西华大学机械工程与自动化学院,四川 成都 610039)
0 引 言
倒立摆系统是一个非线性、强耦合、多变量和自然不稳定的系统,倒立摆通常是用来检验控制策略效果的系统,也是控制理论研究中较为理想的实验装置[1]。又因它与火箭飞行器及单足机器人有很大的相似之处,引起国内外学者的广泛关注。其控制方法在军工、航天、机器人领域和一般工业过程中都有着广泛的用途。如机器人行走过程中的平衡控制,火箭发射中的垂直度控制和卫星飞行中的姿态控制等均涉及到倒置问题,而其中反馈信号的滤波成为一个要解决与研究的问题。
1 卡尔曼滤波的介绍
卡尔曼滤波算法是由美国学者RudolfE.Kalman[2]在20世纪60年代初提出的一种最小方差意义上的最优预测估计方法,便于计算机实时处理,它提供了直接处理随机噪声干扰的解决方案,将参数误差看作噪声以及把预估计量作为空间状态变量,充分利用所测量的数据,用递推法将系统及测量随机噪声滤掉,得到准确的空间状态值。
卡尔曼滤波算法流程为:
1)第一步为预估:

2)第二步为增益矩阵计算:

3)第三步为状态更新:

4)卡尔曼滤波器是一种线性的离散时间有限维系统。每次完成一次估计后,都要把新的方差递归,使滤波后的状态估计误差的相关矩阵P(k+1|k+1)的迹最小化。这意味着,卡尔曼滤波器是状态向量X(k)的线性最小方差估计。EKF算法收敛的必要条件是:P(k|k)阵与P(k+l|k)阵为对称正定阵。若P(k|k)→∞、K(k+1)→0,则算法发散。而P阵初值的选取也影响EKF算法的收敛,对不同的非线性系统取值不同,仍主要依靠试凑[3]。
2 倒立摆系统中传感器的介绍
2.1 加速度传感器
倒立摆系统中加速度计传感器选择为飞思卡尔公司的MMA7361,MMA7361是一块三轴的模拟加速度计传感器,可以工作在(±1.5)G和(±6)G两种状态,工作在(±1.5)G模式时为800 mV/g,体积小仅为3 mm×5 mm×1.0 mm。
该加速度传感器可以测量重力或者物体运动所产生的加速度,该加速度传感器是通过微机械加工技术在硅片上形成的一个机械悬臂。它与相邻的电极形成两个电容。由于加速度使得机械悬臂与两个电极之间的距离发生变化,从而改变了两个电容的参数。通过集成的开关电容放大电路测量电容参数的变化,形成了与加速度成正比的电压输出。
加速度在静止的状态下,输出的电压和倾角存在有一种三角函数关系,在静态情况下,通过运算可以很准确地得到倒立摆系统的真实角度。但是在运动过程中,由于外界产生了非重力加速度,对其电压输出产生很大的干扰,它叠加在重力分量上,使得输出信号无法精确地反映倒立摆系统真实的角度[4]。
2.2 陀螺仪传感器
陀螺仪传感器选择的是村田公司的ENC-03RC,这块传感器的测量范围为-300°/s~+300°/s,输出0~3.3 V的模拟信号,在未测量到角速度信号时输出的电压为1.35 V。
陀螺仪输出的是角速度,信号不受运动的影响,所以器件本身输出信号噪声非常小,倒立摆系统的角度可以通过角速度积分而得到,这样可以获得比较准确的角度。但是由于陀螺仪本身的角速度信号有微小的偏差,经过积分运算后,就会有累计误差,如果不处理,这个误差会一直积累,最终会导致数据饱和,根本无法获得真实的角度。
2.3小结
通过实验发现,不管是单独使用加速度计还是陀螺仪都无法得到倒立摆系统的精确角度。它们两者各有优缺点。加速度计在静态下,准确性高,但是在动态时极其容易受到干扰。对于陀螺仪而言,由于由于陀螺仪本身的角速度信号有微小的偏差,在静态的时候,一直会存在累计误差产生,然而在动态的时候,它的抗干扰能力相当强。可以看出,如果同时使用加速度计和陀螺仪传感器,配合一种算法,就完全解决了倒立摆系统最棘手的准确角度问题。显然,要解决这个问题,必须要用一种精妙的虑波算法,把两个传感器的数据融合。显然,卡尔曼虑波就是较好的选择。
3 实现结果
卡尔曼滤波在时域中采用递推方式进行,速度快,便于实时处理。本次试验将陀螺仪积分得到的角度值和加速度仪得到的有误差绝对角度值,将两者当作有噪声干扰的观测值,通过分配不同的权重,最终滤波得出最优预测估计值。滤波图像,见图1。
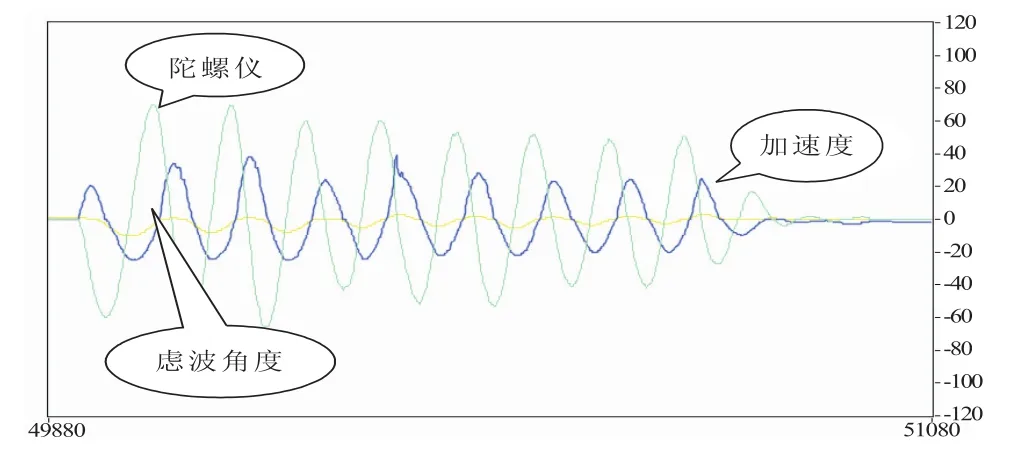
图1 持续扰动滤波试验图
由图1可知,在扰动的情况下,通过卡尔曼虑波算法,可以比较准确地得到倒立摆系统的正确角度。
4 结 论
为了提高倒立摆系统的控制性能,提高倒立摆系统的鲁棒性。本文在介绍了卡曼滤波原理的基础上,并使用卡曼滤波对角度信号进行了很好的处理,从实验结果来看,该方法效果比较理想,对倒立摆系统的稳定性和抗干扰性有很大的提高,动态响应好,具有较大的实际应用价值。
[1] 王晓娟,王宣银.基于模糊卡尔曼滤波的移动机器人定位研究[J].浙江大学,2011(2):204-206.
[2] 王睿,阎鹏,刘红英,等.基于扩展卡尔曼滤波的舰机相对位姿估测[J].北京航空航天大学学报,2006(11):1349-1353.
[3] 李理敏,龚文斌,刘会杰,等.基于自适应扩展卡尔曼滤波的载波跟踪算法[J].航空学报,2012(7):1319-1328.
[4] 陈振,刘向东,勒永强,等.采用扩展卡尔曼滤波磁链观测器的永磁同步电机转矩控制[J].中国电机工程学报,2008,28(33):75-81.
[5] 单波,徐燕.预测控制算法及其在倒立摆中的应用[J].华北电力大学学报,2001,8(2):46-51.
[6] 丛爽,张冬军,魏衡华.单级倒立摆三种控制方法的对比研究[J].系统工程与电子技术,2001(11):1013-1016.