基于GSM双音多频信号控制的小车设计
2013-06-23杨润丰
杨润丰
(东莞职业技术学院电子工程系,广东 东莞 523808)
智能小车在远程控制中的应用,可在一些危险场所,人们无法现场作业或进行控制,如农场储水池、洞穴、有害或放射性实验室等。准确和实时地远程控制,是遥控和智能控制的一个研究方向。无线通信技术应用,如无线局域网(WiFi、蓝牙、ZigBee、2.4 GHz无线通信[1]等。其中双音多频信号(Dual Tone Multiple Frequency,DTMF)[2]用于长距离的数据传输时,无需专用数据传输线且可靠性高,可用于自动控制系统。近年来,双音多频信号应用在交互式控制中,使拨号的速率提高。把双音多频信号的发送电路用于主控系统,接收电路用于被控系统,便可组成有线或无线通信系统。GSM(Global System for Mobile communications,GSM)[3-4]技术应用广泛,可通过手机或固话机作终端,通过双音多频信号的GSM网络通信方式无线控制小车的移动,具体由终端上的5个数字按键(2、4、6、8、5)控制,使小车按照指令驱动步进电机完成移动任务。
1 系统分析与设计
设计了基于GSM模块的双音多频信号控制的小车。如图 1所示,小车系统主要由 CMOS的 PIC 18F452微控制器作为控制主机,外接GSM调制解调器、双音多频解码器、步进电机、以及40 MHz晶振和+5 V电源。此系统结构简单、可靠性高、抗干扰能力强、适用范围广,并且易于扩展。通过一系列设计规则要求实现各模块之间的有效通信。GSM调制解调器向用户提供标准的AT命令接口,为数据、语音和短消息提供快速、可靠、安全的传输。它与PIC微控制器之间以ASCII字符形式传输AT指令串。步进电机也根据AT指令控制线圈的电流方向,使转轴转动控制小车完成任何方向和旋转移动,以配合小车的全方位运动规划。电机转速、停止位置都取决于脉冲信号的频率和脉冲数。PIC微控制器提供的控制信息序列,是通过双音多频信号解码转换为数字形式而得到控制步进电机脉冲信号的频率和脉冲数。
1.1 GSM调制解调器
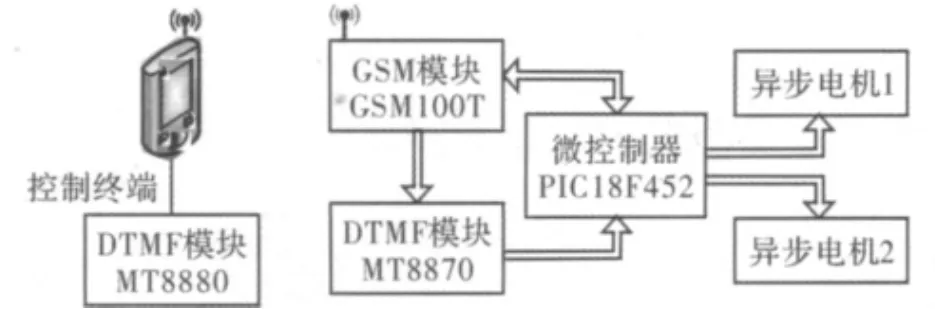
图1 基于GSM模块的双音多频信号控制系统
GSM通过相邻基站的互连构成通信网络,并使用900 MHz或1800 MHz作为传输的工作频段。项目选择双频段的GSM调制解调器GSM100T,支持热插拔功能,并以RS232串口连接计算机操作系统或单片机进行通信,其硬件控制设置通常为每秒115.2 kbit,8位有效数据,1停止位,不使用校验位。根据GSM相关事件与服务响应,在应用程序中进行AT指令交换,并且AT指令分为数据模式和控制模式。在控制模式中,包括网络注册检查、接收信号强度、接拨号、挂断、信号中断、占线等,程序在指令寄存器的物理地址直接调用控制指令,如S7=60,表示设寄存器寄存器#7的数值为十进制60。那么,PIC微控制器通过AT指令对GSM调制解调器进行基本的控制操作。
1.2 双音多频及其编解码器
双音多频信号是音频电话的拨号信号,它本不用于数据信号的传送,而是传送控制信号,并指定了每两个音频信号的间隔为600 ms。每一个号码由两个音频信号组成,该双音频由按键所在的行和列对应的频率决定,如图2所示。每按下一个数字,则行与列的对应输入端为低电平。这样,就形成一种双音频组合,以产生相应的双音多频信号。终端上的5个数字按键(2、4、6、8、5)分别同步产生两个频率和两个相差4 dB幅度的信号,此信号通常由RC网络电路产生。加拿大Mitel公司生产的双音多频信号编/解码芯片系列芯片是该系列产品中较新的一种,该芯片功能强、功耗低、工作稳定可靠,广泛应用于程控交换机、无线通信设备、移动通信等系统中。项目使用MT8880编码器芯片,它由两个二阶数字正弦波振荡器构成,一个用于产生行频,一个用于产生列频。对双音多频信号进行高精度解码并不容易,接收设备对2%的偏差能可靠地接收。这里使用MT8870D解码器芯片,其内部使用了6阶滤波,能减少失真并产生理想的正弦信号。
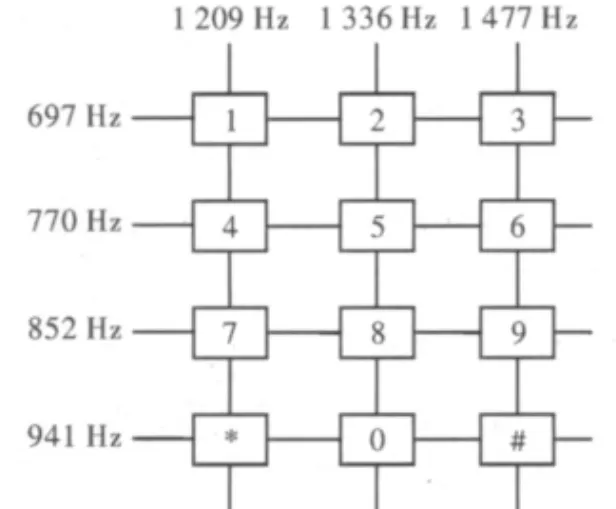
图2 双音多频的拨号键盘与其对应的高低频组合

图3 步进电机“H”桥式驱动电路
1.3 步进电机的控制
项目使用混合式步进电机,它是一种将电脉冲转化为角位移的执行机构,利用电子电路将直流电变成分时供电,多相时序控制电流。步进电机的驱动电路通常被称为H桥式电路,如图3所示。当X是逻辑“1”、X′是逻辑“0”时,Q2闭合,Q1打开,而 Q4使 Q3闭合。电源电流经Q1从左至右流过电机线圈,接着流向D2和Q4到地。当X是逻辑“0”、X′是逻辑“1”时,电流流向Q3,从右至左流过电机线圈,然后到D1和Q2再到地。那么以电流的方向形成序列的形式,并可通过序列的改变使步进电机作逆时针方向转动。如图4所示,电流经过线圈X和线圈Y时,两个重叠的电磁铁,并驱动转轴转动。当电流经过线圈X的方向改变时,转轴转动,线圈Y电流的方向改变相继将转轴转动,重复以上步骤,步进电机能进行连续单向转动。此系统使用步进电机驱动芯片L293,它是多相时序控制器,单片机需把双音多频信号解码进行处理以符合驱动步进电机的序列要求。
PIC微控制器向步进电机驱动电路按顺序输入“0101”→“1001”→“1010”→“0110”序列,使电机进行顺时针转动,按顺序输入“0101”→“0110”→“1010”→“1001”序列时,电机进行逆时针转动。PIC微控制器需合理分配和设置所需端口。PIC单片机的PORTD端口作为DTMF(Q1~Q4)数据输入端口,PORTC端口连接串口RS-232,PORTB端口连接步进电机。
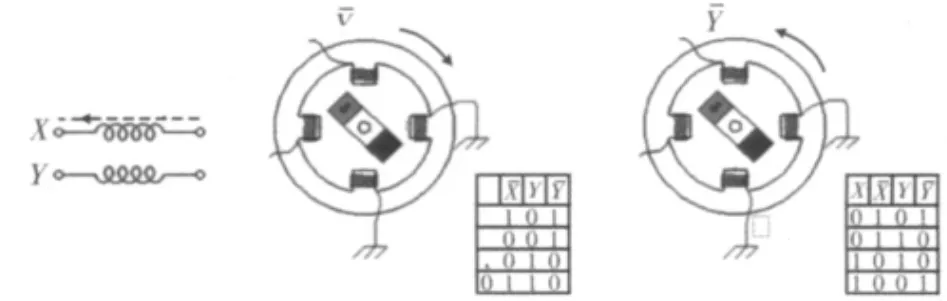
图4 步进电机控制示意图
2 系统性能测试
测试分3个阶段进行。第一阶段,对GSM调制解调器进行响应测试,以确保正确的响应。当接收到GSM信号呼入时,通过AT指令可进行回应,一系列响应如表1所示。第二阶段,以固定序列驱动步进电机,以确保正确的电机转向。第三阶段是系统联调,使用终端按键产生双音多频GSM信号,小车接收GSM信号呼入后按相应的驱动序列进行移动。实验表明,小车能按要求行驶,实现可靠的远程控制。
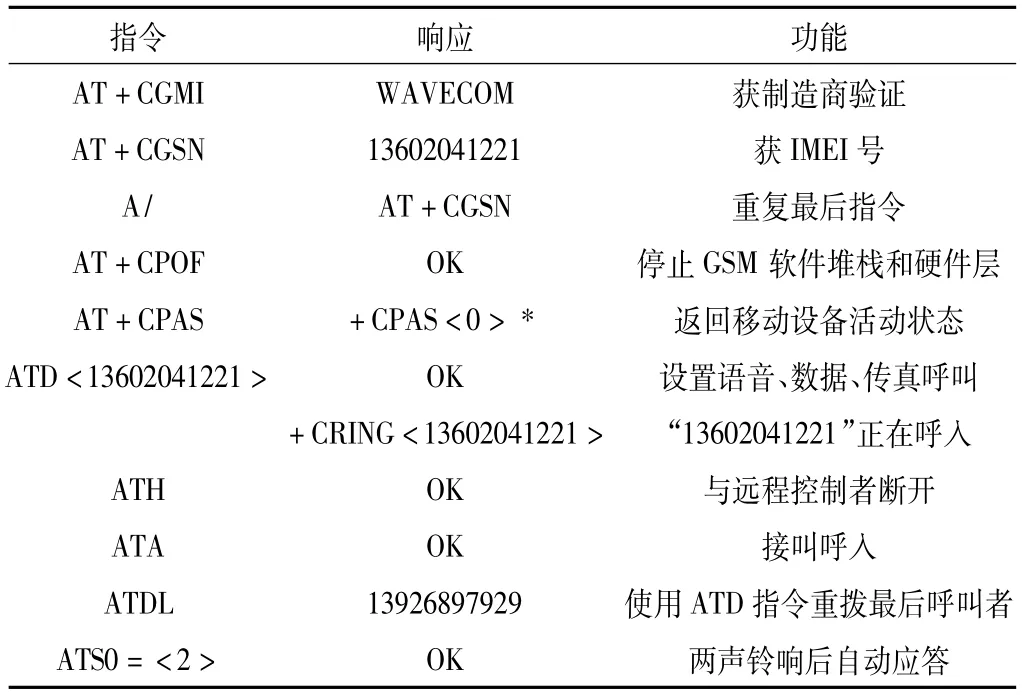
表1 AT指令测试
3 结束语
双音多频信令具有良好的传输速度,使其广泛应用于各种通信和控制系统中。项目设计了基于GSM网络双音多频信号控制的小车。只要在GSM网络范围内,能够准确、实时地远程控制小车,可以取代一些特殊和危险环境作业的人工操作。
[1]杨润丰,陈晓宁,朱彩莲.基于ATmega8的无线智能跳频数码扩音系统[J].电子科技,2012,25(7):58 -60,65.
[2]陈映江,张仁陟,赵来娟,等.远程控制精准化灌溉系统中基于DTMF信号的数据传输技术[J].甘肃农业大学学报,2011,24(2):152 -155.
[3]杨峰,柳永胜,殷小贡.新型DTMF信号收/发芯片MT8888及其应用[J].现代电子技术,2002(1):89-91.
[4]杨润丰,卞建勇,杨洋.基于ATmega16的红外微波双鉴GSM 报警器[J].微计算机信息,2011(7):35-37.
[5]沈华东,周义,张坤.基于GSM网络的柔性制造车间安防报警系统设计[J].机械设计与制造,2009(8):252-253.