基于电磁作动器的柔性结构振动控制仿真及实验研究
2013-06-15郭勤涛金超武
张 定,郭勤涛,金超武
(南京航空航天大学机电学院,江苏 南京 210016)
0 引言
振动主动控制是改进结构振动特性的主要手段之一。在振动主动控制中如何精确建立仿真模型是设计控制策略、实现控制优化的基础。被控机械结构为柔性结构时,需要通过有限元分析或其他方法精确建立机械结构的动力学模型。近年来,多体动力学理论成为各工程领域最为活跃的建模理论,而虚拟样机技术也日渐成熟,基于各种虚拟样机模型的仿真和测试也已成为试验研究和理论仿真分析的重要手段[1-5]。目前,在比较先进的振动控制技术中,很多使用压电控制的方法[3,6]。对于柔性体的结构振动主动控制,大多是进行各种仿真研究。而利用磁悬浮原理设计电磁作动器,并进行实际试验对比不多见。电磁作动器[7]是磁悬浮技术应用的关键部件之一。近些年,磁悬浮技术得到了迅速发展,并得到了越来越广泛的应用,这也推动了电磁作动器的发展研究。反过来,电磁作动器的研究又促进了磁悬浮技术的发展。故使用课题组自行研制的磁悬浮PID控制系统进行结构振动控制,具有很高的可靠性[8]。
1 磁悬浮振动控制系统
1.1 系统的工作原理
悬臂梁在悬浮时由于外界干扰的存在会产生振动,安装在轴承上的一对差动电涡流传感器,检测到梁上下2个表面距离对应的传感器的位移变化并转化为电压信号,与参考电压比较后将偏差量送入控制器,控制器根据控制策略输出控制电压信号,经开关功率放大器转化为控制电流,并通入到电磁线圈来改变电磁力的大小,使得柔性梁回复到平衡位置,从而实现柔性梁的振动控制。
1.2 电磁力计算
假定电磁铁与板气隙之间的磁场均匀,不考虑漏磁与磁滞等因素的影响,电磁力的大小可表示为:

式中 k=μ0N2A/4
μ0为真空磁导率;N为线圈匝数;i为线圈中电流;A为电磁铁心横截面积。
由于板振幅较小,基本是在平衡位置处振动,将电磁力在平衡位置处泰勒展开,得到线性化公式为:

kx,ki分别为作动器在梁运动方向上的位移刚度和电流刚度;Δx,i分别为运动方向上梁的位移与控制电流的大小。
根据实验系统的设计,得到位移刚度与电流刚度为kx=31N/mm,ki=15.5N/A。
2 系统的建模
简单刚体模型一般是直接在ADAMS中建立即可,而复杂刚体模型可以通过Pro/E,UG等功能强大的三维建模软件来进行建模和装配,然后生成中性文件(parasolid格式),导入到ADAMS中。通过在ADAMS中加约束与运动等,来实现系统的运动与动力学仿真。而针对悬臂梁这类大柔性体而言,目前的主要手段是通过在ANSYS,Patran等有限元软件中生成模态中性文件(MNF),然后将中性文件导入ADAMS。建立仿真模型及数据交换的流程如图1所示。

图1 联合仿真数据交换流程
2.1 系统mnf文件的生成
2.1.1 单位的设置
在Patran里面使用的是一套封闭的单位,一般是 mm,n,t,mPa和 m,n,kg,Pa。为了和 ADAMS中保持单位一致,采用 mm,n,kg,mPa,只需要在Patran提交计算时,对质量单位(WT_mass_conversion)设置为0.001即可。
2.1.2 有限元网格的划分
在有限元模型中,除了界面点外,其他地方都可以用常规方法进行有限元建模。本文采用直接划分的方式生成六面体有限元网格,由于要模拟悬臂梁结构,对于薄板的实体有限元模型,在一端建立节点node1并约束6个自由度,用RBE2将梁端部节点与所建立的节点node1连接在一起形成固支端。由于悬臂梁结构的自由端和中间位置分别要受到电磁力与外界激励力,所以需要在对应的节点上方分别建立节点node2,node3。新建 RBE2将node2,node3与梁上受力区域节点连接起来,并且定义node2,node3为界面点。设置单元的属性与材料参数后,提交计算生成mnf文件。
2.2 系统的仿真模型
2.2.1 柔性体模型检查
在建立好系统的三维模型后,直接将Patran生成的柔性梁模型mnf文件导入到ADAMS文件中,可以看到在有限元中定义了界面点的地方会生成局部坐标系;双击柔性体模型,可以看到对话框图形,点击相应的图标,比对在ADAMS中柔性体的模态频率与振型是否与Patran中相一致。以免单位或其他设置而影响联合仿真的结果。
2.2.2 定义模型之间的约束
为了模拟真实的悬臂梁模型,需要在柔性梁模型固支端的node1处加固定副。在ADAMS/View中导入柔性体后,可以在其上施加作用力。在ADAMS中,只有当柔性体是主动(施力)物体时才能在其上施加作用力,如果柔性体是被动(被加载)物体,则可以通过在柔性体上附加无质量连接物体,将力施加在该无质量连接物体上。对于系统的模型,需要在柔性梁模型自由端和中间处的node2和node3位置处建立哑物体,设置其质量和转动惯量都为零,并将哑物体与柔性体用固定副连接在一起。分别在对应的哑物体质心上加载电磁控制力F2和干扰力F1。为了建立作动器与悬臂梁之间的约束,在模型上创建了2个关键点,分别是mark_ban和mark_di。一个在柔性梁模型的自由端节点上,另外一个在自由端处下方的定子上。
建立2个状态变量,一个输入变量控制电流,一个输出变量控制梁与定子之间的位移。具体定义如表1所示。柔性梁与定子间的单边气隙为1mm。
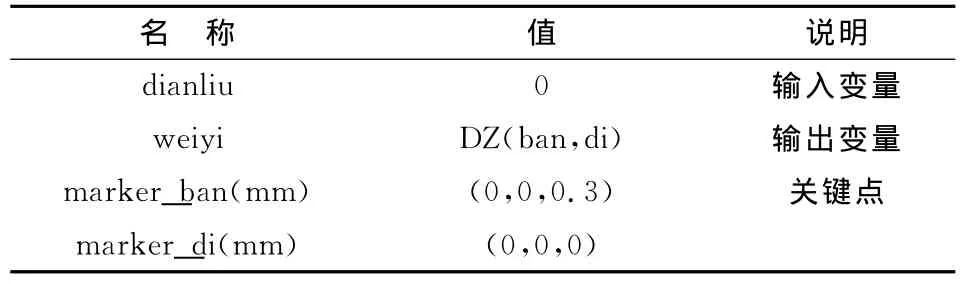
表1 关键点及状态变量的定义
在ADAMS中定义F2为-31*(VARVAL(weiyi))-1)+15.5*VARVAL(dianliu),方向与位移正方向相反,初始干扰力F1为0。
2.3 建立虚拟样机系统
在磁悬浮振动控制中,一般不采用常规的PID控制器,而是在微分项中加入一阶低通滤波器。系统所采用的不完全PID控制器主要由比例环节、积分环节和微分环节组成。其中比例环节又分为大比例与小比例环节[9]。
建立好仿真模型后,指定输入输出变量,导出控制变量。打开Matlab软件建立好数据接口,并调用Simulink模块,在Simulink中建立控制模型。
2.3.1 悬臂梁模型起浮过程仿真
由于实际的悬臂梁模型在制造和安装过程中,不可避免的有制造与定位误差以及梁结构翘曲变形等一系列的问题,使得悬臂梁在控制系统作用下能否顺利回到指定位置,是检验控制系统好坏的首要指标,因此,需要对悬臂梁模型的起浮过程进行仿真。
假设悬臂梁在挠度方向相对于中心位置(0,0,1)的初始坐标是(0,0,0.3);及未起浮时梁离一边定子的距离是0.3mm。将上一步生成的*.m格式文件导入Matlab/Simulink中,采用模拟PID控制器建立控制模型。确定控制参数后,即可设置仿真参数,通信时间间隔设置为0.005s,仿真模式为continous,动画模式为interactive,采用 Matlab自带的变步长龙格-库塔法数值积分函数ode113,进行数值积分。仿真结束后将结果文件*.res导入ADAMS的后处理模块,结果如图2a所示。
由图2a可知,经过0.1s,梁从初始的0.3mm处回到平衡位置1mm处,超调为24%左右,稳态性能良好。
2.3.2 悬臂梁模型冲击过程仿真
当悬臂梁模型在控制系统作用下,不可避免的要受到外界的干扰。对悬臂梁模型进行冲击,可以测试悬臂梁模型的承载与动态性能。冲击加载在悬臂梁的中间节点位置,令干扰力F1=STEP5(TIME,0.2,0,0.205,50)-STEP5(TIME,0.205,0,0.21,50),加载方向为梁的挠度方向,来模拟梁受到冲击的时域响应,结果如图2b所示。
由图2b可知,梁首先经过0.08s的起浮过程回到平衡位置。在0.2s时受到冲击,但是受到冲击时,响应的位移量很小,约为0.05mm。并且经过0.15s就可恢复到平衡位置。说明梁在控制系统的作用下具有一定的抗冲击能力。
2.3.3 悬臂梁在正弦干扰力下的仿真
将上述的冲击力改为正弦的激励力,激励的大小为20N,频率分别为20Hz和30Hz,得到的端点位移响应如图2c所示。在正弦干扰下,悬臂梁结构振动依然比较小,端点位移响应接近于正弦。但是在激励幅值相同的情况下,位移响应的幅值在30 Hz时比在20Hz时略大。

图2 悬臂梁在有控制作用下的起浮,冲击,正弦干扰的时域响应
3 悬臂梁振动控制系统实验效果
实验设备主要包括控制器、功率放大器、悬臂梁振动控制试验台、动态信号分析仪、力锤、NI数据采集卡、信号发生器、动态信号采集仪、示波器、电脑和分路开关等。实验时,首先对电涡流传感器进行标定,然后开启整套磁悬浮控制系统,包括控制板与功率放大器,运行电脑中的LabVIEW,对悬臂梁的自由端点位移响应进行监测,调节PID控制器参数,观察LabVIEW中传感器输出信号波形。当传感器输出电压信号为2.5V,且较稳定时(传感器标定原则是悬臂梁紧贴在磁极“正端”时,输出电压为0V;在另一端时,输出电压为5V),控制系统调节完成。
用力锤分别对有控制与没有控制的工况下的悬臂梁结构进行敲击实验,用动态信号分析仪记录敲击的力信号与压电传感器的加速度信号。分别用2组不同的力信号进行了实验,得到的实验结果如图3所示。

图3 冲击力时域响应和加速度响应的对比
由图3可知,对于梁结构同一敲击点,当力锤信号基本相同,且有控制作用(粗实线)时,结构的振动很快衰减,0.1s时振动基本消除。而当无控制作用时,结构的振动衰减比较慢,到达0.5s时,振幅还比较大。在不同力和不同时间段,结构的加速度RMS响应值如表2所示。

表2 力锤冲击下结构加速度响应RMS值
由表2可知,在有控制的作用下,结构中由于冲击而产生的振动很快衰减;在前0.07s作用下,控制系统的控制效果不是很明显;过了0.07s后,振动明显减小,基本达到消除的目的。经过分析可知,控制系统中的控制电流存在一定的滞后,使得控制系统的控制作用有一定的延迟。
4 结束语
利用ADAMS与Matlab联合建模的方法,实现了柔性结构振动主动控制的仿真,并进行了试验研究。结果表明,利用磁悬非接触式作动器对柔性结构的振动抑制效果明显,为更精确地建立磁悬浮振动控制系统的数学模型提供了依据。下一步,将对机电一体化模型进行机械结构参数的修正,并对控制系统的参数不确定性进行研究与修正,以达到机电耦合模型的精确建模的目的。
[1]Indra Narayan Kar,Kazuto Seto,Fumio Doi.Multimode vibration control of a flexible structure using hbased robust control[J].IEEE/ASME Transactions on Mechatronics,2000,5(1):23-31.
[2]宋春生.柔性浮筏系统的磁悬浮主动隔振理论与控制技术研究[D].武汉:武汉理工大学,2011.
[3]王 亮,陈怀海,贺旭东,等.悬臂梁振动非接触式磁力主动控制研究[J].振动与冲击,2010,29 (7):94-98.
[4]房元鹏,吴大方,李永亭,等.柔性悬臂梁的振动主动控制[J].航空计测技术,2004,24(5):11-14.
[5]张永德,汪洋涛,王沫楠,等.基于ANSYS与ADAMS的柔性体联合仿真研究[J].系统仿真学报,2008,20(17):4501-4504.
[6]顾仲权,马扣根,陈卫东.振动主动控制[M].北京:国防工业出社,1997.
[7]胡业发,周祖德,汪征风.磁力轴承的基础理论与应用[M].北京:械工业出版社,2006.
[8]胡寿松.自动控制原理.4版[M].北京:科学出版社,2001.
[9]冯 恒.磁悬浮轴承系统仿真分析[D].南京:南京航空航天大学,2010.
