卫星发射任务主动段实时弹道算法研究
2013-06-13胡亚男甘友谊王盛玺
胡亚男,甘友谊,王盛玺
(太原卫星发射中心,山西太原030027)
0 引言
在靶场卫星跟踪任务中,由于布站几何的限制,需利用脉冲雷达与3或4台高精度测速雷达联合解算实时弹道。传统的实时弹道计算方法有综合求速解析法和微分平滑法,这2种方法的优点是简单易行,但是由于对定位测元精度的依赖性很强,所以解算出的弹道精度不高。事后传统的数据融合方法——逐点多站最小二乘可以应用到实时弹道解算,但是目前的布站几何会导致在某个特定时间域出现计算发散的状况。“UKF”算法是在无迹变换(Unscented Transformation,UT)的基础上,借用卡尔曼线性滤波框架建立起来的,它利用非线性状态方程来估算状态向量的概率密度函数,其估计精确度对于任意非线性问题均可达到二阶以上[1]。采用上述不同方法解算实时弹道,分析评估弹道精度,对目前靶场实时弹道计算方法进行研究和评估。
1 实时弹道算法
1.1 综合求速
把脉冲雷达在测站坐标系中的观测量R、A、E转换成测站发射坐标系中的观测量R'、A'、E'后,根据几何关系,第tj时刻目标在发射坐标系中的位置参数Xj=[xj,yj,zj]T为:
式中,x0、y0、z0为测站在发射坐标系中的站址坐标。
连续波多测速系统在tj时刻的观测方程为:



将式(2)的方程组写成矩阵形式为:

式中,
则tj时刻目标在发射坐标系中的速度参数为:

1.2 微分平滑
把脉冲雷达观测量转换到发射坐标系下,直接根据几何关系由式(1)得到目标在发射坐标系中的位置参数,然后使用最小二乘中心微分平滑公式对位置参数进行一阶微分,得到目标的速度参数为:

式中,h为步长;N为总平滑点数;n为中心平滑半点数;N=2n+1。
1.3 逐点多站最小二乘
第tj时刻脉冲雷达在发射坐标系的观测方程为:
连续波测速雷达的观测方程为式(2),由于式(8)和式(2)都是非线性方程,一般将该两式联立并泰勒展开成线性方程,设观测随机误差为ζj,则展开后的线性模型为:

式中,

而

式中,(·)|0表示初始弹道参数代入对应方程得到的观测元素的初始值;Aj为各测量元素关于弹道参数的偏导数组成的雅可比矩阵,对应的值由初始弹道参数代入得到。
随机误差向量ζj满足利用高斯—马尔可夫估计得到tj时刻弹道参数增量ΔXj的最优线性无偏估计为:[2]

误差协方差阵为:

而tj时刻弹道参数Xj的估计值为:

通常需要迭代计算以提高弹道参数的解算精度。将第一次解算得到的弹道参数作为初始弹道参数,继续上述处理过程,直至解算的弹道参数增量很小为止。
1.4 UKF算法
Julier等人针对改进非线性滤波问题提出了基于UT的滤波思想,其相应算法称为无迹Kalman滤波(Unscented Kalman Filter,UKF)。该算法是在无迹变换(简称UT变换)的基础上,采用一种确定性抽样方法(Sigmadian的抽样方法)来计算均值和协方差。而UT变换的核心思想是:对概率密度函数的估计比非线性函数更容易[3-5]。理论证明UKF算法对于任意非线性问题均可达到二阶以上精度。
UKF的算法流程如下:
①σ点集及其权值的选取:在n维状态矢量集X={x1,x2,…,xn}中选取2n+1个σ点集及其相应权值。
②通过非线性函数f(·)传递σ点集:

③预测均值及协方差:
④将σ点集通过观测方程:

⑤计算:
⑥更新状态均值mk和协方差Pk:

针对机动目标的 UKF算法,已有很多的应用[6~10],仿真计算中采用的是一种基于“当前”统计模型的方法,文献[10]有较为详细的计算公式,这里不再赘述。
2 仿真结果分析
下面以某次卫星跟踪测量任务为例进行仿真计算,算例中使用的雷达测量数据均为事后修正数据。
从4种方法的计算过程和结果分析,可以说各有特点:
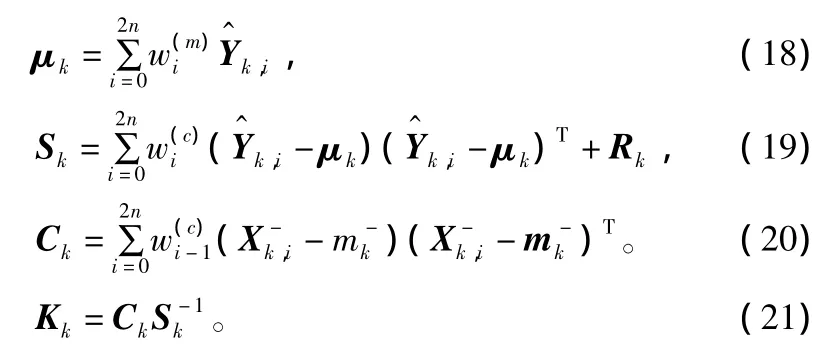
①传统的综合求速法计算简单,但对定位元的依赖性很大,也就是说对脉冲雷达实时测量数据的精度要求较高;② 微分平滑法完全依赖于定位测元,计算虽然最简单,但速度的计算没有与高精度测速元融合,因此速度精度很低;③ 由于跟踪几何的原因,逐点多站最小二乘法会出现雅克比矩阵局部奇异的现象,使计算结果发散;④ UKF算法不受跟踪几何影响,且计算结果精度较高,但对初值的选择有一定范围的要求,如果初值误差较大,也会出现发散的状况。
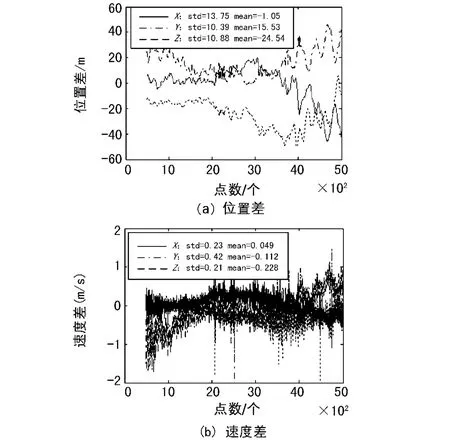
图1 综合求速法弹道比对结果

图2 微分平滑法弹道比对结果

图3 逐点多站最小二乘法弹道比对结果
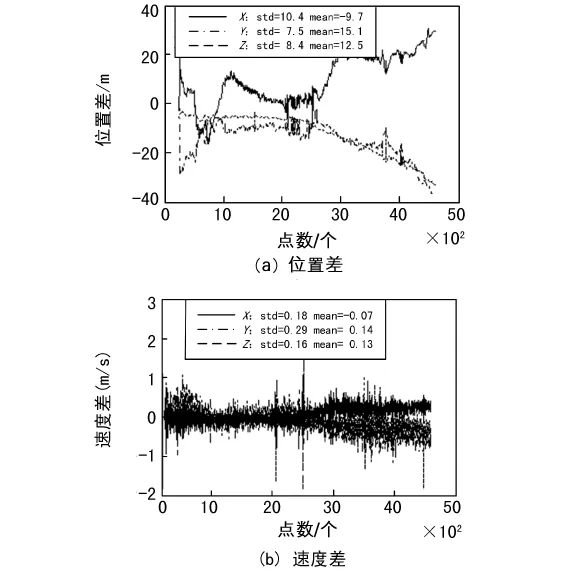
图4 UKF算法弹道比对结果
图5 最小二乘主法雅可比矩阵条件数
3 结束语
卫星发射任务时,采用UKF算法把脉冲雷达测元与高精度测速元融合,能够提高实时弹道解算的精度。但是需要对遴选初值的方法做进一步探讨;在出现极端情况(比如提供初值的设备出现异常)时,滤波器发散,如何再次获得满足要求的初值,如何有效地提高捕获初值的速度,都是下一步必须重点研究的内容。从另外一个角度考虑,如果能够提高脉冲雷达实时处理数据的精度,采用综合求速法计算实时弹道仍不失为一个简便而有效的方法。
[1]JULIER S J,UHIMANN J K,DURRANT H F.A New Approach for the Nonlinear Transformation of Means and Covariance in Filters and Estimators[J].IEEE Trans on Automatic Control,2000,45(3):477 -482.
[2]刘利生.外测数据事后处理[M].北京:国防工业出版社,2000:367-368.
[3]JULIER S J,UHIMANN J K.Unscented Filtering and Nonlinear Estimation[J].Proceedings of the IEEE,2004,92(3):401-422.
[4]SINGER R A.Estimating Optimal Tracking Filter Performance for Manned Maneuvering Targets[J].IEEE Trans on Aerospace and Electronic Systems,1970,5(4):473-483.
[5]JULIER S J,UHIMANN J K.Reduced Sigma Point Filters for the Propagation of Means and Covariance through Nonlinear Transformations[C]//Proceedings of the American Control Conference,2002:887 -892.
[6]彭 焱,金宏斌,徐 毓,等.一种改进的机动目标跟踪算法[J].雷达与对抗,2007(4):54-56.
[7]唐 波,崔平远,陈阳舟.Unscented卡尔曼滤波在状态估计中的应用[J].计算机仿真,2006(4):82-85.
[8]吴 玲,卢发兴,刘 忠.UKF算法及其在目标被动跟踪中的应用[J].系统工程与电子技术,2005(1):49-51.
[9]王淑一,程 杨,杨 涤,等.ukf方法及其在方位跟踪问题中的应用[J].飞行力学,2003(6):59-62.
[10]陈伟利,李 颢.基于“当前”模型的UKF滤波算法在目标跟踪与实时弹道估计中的应用[J].导弹试验技术,2008(3):71-75.
