动力定位系统推力分配算法研究
2013-06-12张法富刘鸿雁
张法富,刘 波,刘鸿雁,杨 辉,周 楠
(海洋石油工程股份有限公司设计公司,天津300451)
在动力定位(DP)船初步设计阶段,合理的推力分配逻辑直接或间接影响推进器选型、布置,从而对主机选型也产生影响[1-2]。本文针对初步设计阶段的特点,对DP系统推力分配计算方法进行研究,选取合适的目标函数,解决推力分配最优化问题,实现目标船对经济性、可靠性和操纵性的要求。
1 数学模型的建立
1.1 推力分配的概念
推力分配逻辑,见图1,处于动力定位控制系统终端,接受控制中心指令做为该逻辑的初值,包括系统所需的水平力和艏摇力矩。在求解最优化数学模型后得出推进器转速和方位角,以有效地维持系统的定位能力,并保证系统的经济性、可靠性及可控性等问题[3]。
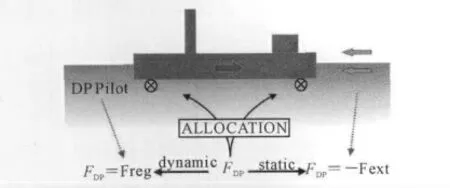
图1 推力分配逻辑示意
1.2 目标函数的选取
鉴于深海开发和抵抗恶劣海洋环境条件的需求,目前新建半潜平台、工程船等大多采用高级别的DP系统。其所用推进器的数目远远超出传统船舶推进器的数目。以“海洋石油278”为例,其推进系统由2台带舵主推进器、3台管道推进器及2台全回转推进器构成。推进器数目的增多,使得仅依靠横荡、纵荡和艏摇3个自由度力及力矩的平衡方程,无法给出准确的推力分配方案。推力分配问题转化为多变量优化问题。
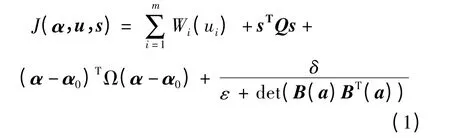
学术界和工程界给出的目标函数主要针对最小功率消耗、避免系统的奇异性、推进器磨损最小、推进器与船体之间及推进器之间水动力干扰最小等方面。文献[4]提出的推力分配优化目标为
其约束条件为

在式(1)中,第1项针对推进系统功率消耗;第2项为惩罚项,保证推力误差s≈0;第3项针对推进器磨损,约束方位角的变化速率,通过式(5)进行约束;第4项用于避免系统奇异结构的发生,式(3)、(4)对推进器推力范围及禁止角进行约束。
目前,国内的研究大多从式(1)出发,对推力分配方案进行优化。在船舶初始设计阶段,针对设计周期短、需要快速给出推进器选型、布置等特点,选择一套简单便捷的推力分配方法是必要的。从环保、节能以及船舶经济性考虑,降低能耗成为首选的优化目标。本文从节能的角度出发,选取低能耗为优化目标。基于最小功率消耗的推力分配逻辑首先需要确定总功率P与推力T之间的关系。
根据文献[5]的推导得出推力Ti与功率Pi之间的关系为

式中:kq(0)——无因次转矩系数;
kt(0)——无因次推力系数。
文献[5]假设了两个完全相同的推进器组成推进系统,对于多个相同的推进器构成的推进系统,各推进器推力与总推力方向相同,且每个推进器输出推力大小相等的时候,推力系统消耗的功率最小。不过这种情况仅在没有艏摇力矩下才成立。在实际应用的动力定位中,由于艏摇力矩的存在,推力分配问题是一个多约束的优化问题。
1.3 简化数学模型
根据1.2分析,推力分配是一个多变量有约束的最优化问题。可用优化方法将推力分配问题转化为包括目标函数、等式约束和不等式约束的约束优化数学模型,然后利用优化算法对其进行求解。
在几种类型的推进器中,只有全回转推进器在任何方向都能产生推力,管道式推进器只能在固定方向产生推力,主推进器只能在前进和倒车方向产生推力。考虑管道式推进器与主推进器推力输出方向固定,将推进器在纵向(X轴)与横向(Y轴)的分量做为变量,于是有

式中:N——推进器数目。
推进器工作时产生的推力方位角αi为

式中:x2i-1——推进器的纵向推力;
x2i——推力器的横向推力。
以最小的功率消耗为目标,根据式(6)功率与推力之间的关系,目标函数可简化为

根据推力范围及推进器禁止角等条件,可以获得三组约束条件。第一组为等式约束,要求推进器产生的推力(矩)要与控制器计算得到的推力指令和力矩指令相等。

式中:Xtreq,Ytreq,Ntreq——控制器发出的X、Y方向的推力指令和力矩指令;
lyi,lxi——推力器到目标船旋转中心(一般取坐标原点)的纵向和横向距离。
第二组为不等式约束,源于推进器最大推力限制。

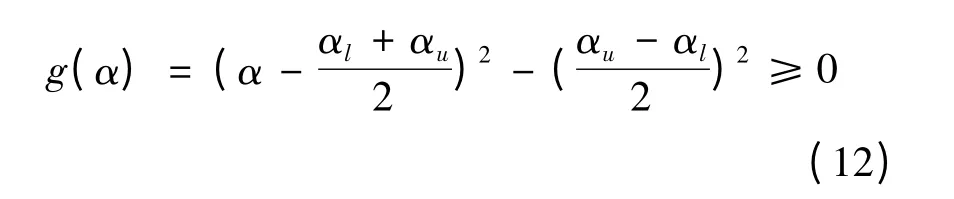
第三组不等式约束主要对禁止角做约束处理。禁止角是对全回转推进器设定的,主要用来降低推进器之间的相互干扰。禁止角在设置时要求指定角度区域的下限(αl,i)和上限(αu,i),从而不等式约束可写成
建立推力分配的数学模型后,就可以通过优化算法对其进行求解。
2 优化算法的选取
针对推力分配问题,国外主要提出以下方法:序列二次规划法、线性规划方法、推进器分组法、奇异值分解和滤波法以及阻尼最小方差法[6-10]。国内对推力分配问题的研究,主要集中在高校,如上海交通大学、哈尔滨工程大学和大连理工大学等,基本上为国外算法的继承和进一步优化。
根据1.3中描述,推力分配问题转化为多变量有约束的非线性优化问题。解决非线性最优化问题的方法有伪逆算法、遗传算法、序列二次规划法(SQP)等。
通过分析非线性问题的各类算法的优缺点,针对简化的推力分配数学模型,本文选取序列二次规划法进行优化计算。
序列二次规划法是求解约束优化问题最有效的算法之一,一般用来求解以下非线性优化问题。

其基本思想是:在每一迭代步通过求解一个二次规划子问题来确立一个下降方向,以减少价值函数来取得步长,重复这些步骤直到求得原问题的解。
本文对二次规划子问题的Hesse矩阵的处理方法基于Powell修正的BFGS公式。
3 实例计算
针对目前深海作业工程船大多采用DP系统的趋势,本文选取某半潜式自航工程船做为目标船,运用序列二次规划法对其进行推力分配计算。
3.1 推进器基本参数
目标船推进器布置见图2。

图2 目标船推进器布置
采用右手系坐标系,原点位于船舯与基线的交点,X轴平行船体基线指向船艏,Y轴位于船舯指向左舷,Z轴竖直向上。推进器方位角是指推进器与X轴逆时针方向的夹角。
推进器相关参数见表1。
3.2 推进器相互干扰的处理
推进器之间的相互干扰,会造成推进器的推力减额。从而造成指令推力和实际获得推力之间出现误差,影响定位精度。根据表1中推进器参数,2#、3#推进器为全回转推进器,当2#、3#推进器螺旋桨位于同一轴线时,就会产生严重的干扰问题。目前,比较惯用的做法是对全回转推进器设置一定角度范围作为禁止工作区域,从而避免大幅度的推力损失。即为禁止角的由来。文献[11]总结了推力减额的经验公式。


表1 推进器基本参数
式中:t——推力利用率;
T——下游推进器推力;
T0——敞水时的系柱推力;
x——两个推进器之间的距离;
D——推进器直径;
φ——推进器螺旋桨轴线的夹角,(°);
tφ——夹角为φ时下游推进器的推力利用率。
根据经验公式及文献[12]的试验结果,当前后两个推进器螺旋桨轴线夹角大于30°时,由推进器之间相互干扰导致的推力损失已经很小。由于管道推进器与主推进器的方位角已经确定,根据目标船推进器的布置特点,此处只需设定2#全回转推进器的禁止角为330°~30°,3#全回转推进器的禁止角为150°~210°。
3.3 SQP数值计算
根据式(9)~(11)及表1中推进器基本参数,目标船的推力分配转化为优化问题如下。
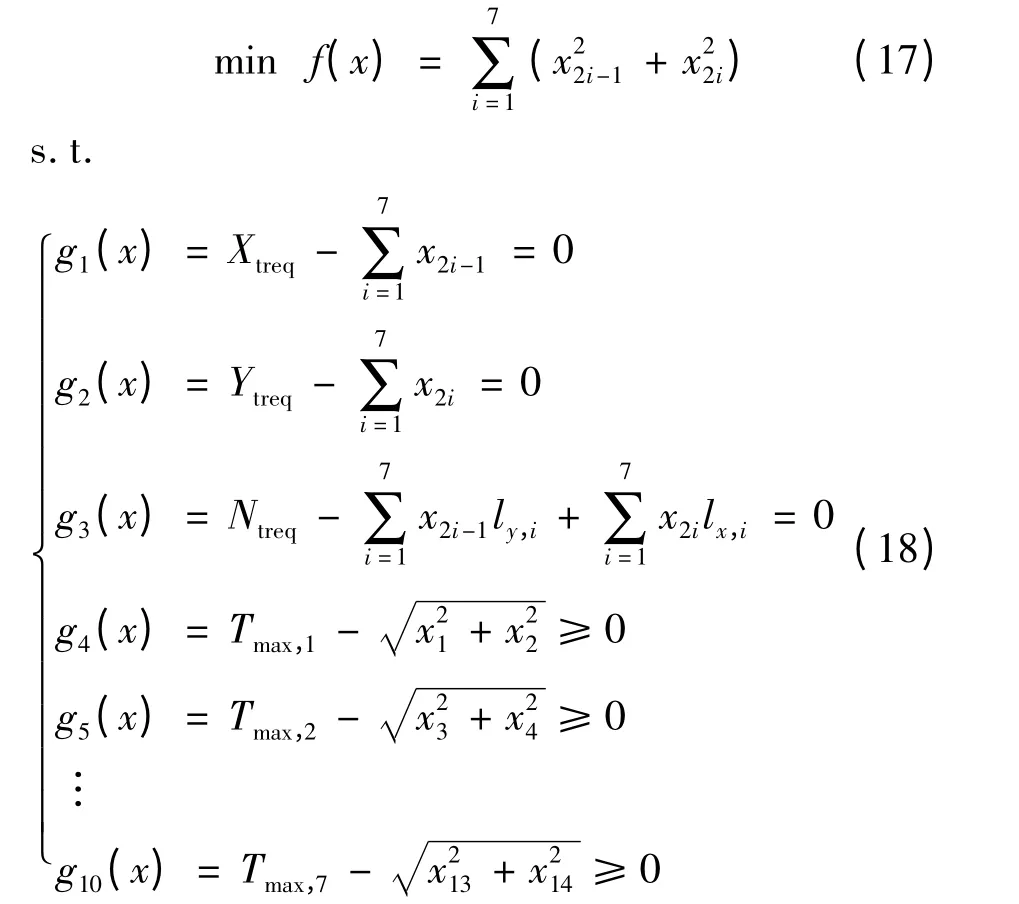
2#、3#全回转推进器的禁止角3.2中已经给出,通过式(8)及式(12)进行约束。根据表1中推进器安装角度,可以得知1#、4#和5#推进器在X方向无推力产生,6#、7#推进器在Y向无推力产生,则优化问题进一步简化。程序中采用一个14X1的数组输出推进器推力。
将指令推力Xtreq、Ytreq、Ntreq(即环境力/力矩)作为输入条件,输出推进器在X轴与Y轴的推力分量。下面以目标船在标准北海环境条件[18]下所遭受的环境力为例,给出目标船在0°,90°环境力方向的推力分配结果。见表2、表3。

表2 0°方向环境力的推力分配结果
由表2、表3可见,采用序列二次规划法能够快速给出以最小功率消耗为目标的推力分配方案。能够为设计初期推进系统设计提供依据,方法是可行的。
从表2看出,设定的禁止角未能很好地约束全回转推进器的方位角,这是由于序列二次算法的局限性引起的。由于禁止角问题不能很好地解决,可以给推进器设定一定的推力冗余。

表3 90°方向环境力的推力分配结果
4 结论
1)利用序列二次规划方法对推力分配进行计算,能够快速地解决以最低能耗消耗为目标函数的推力分配问题。虽然对目标函数进行了简化处理,算法较为粗略,但能快速地为设计初期的推进器选型、布置提供理论依据,同时也能对推进器设计方案进行初步评估。
2)实例计算中忽略了舵的作用,如何在数学模型中将舵的作用考虑进去,有待进一步研究。
3)序列二次规划法对于初值的依赖性很强,全局收敛性较差,对于复杂推力分配问题,其算法还需进一步完善。
[1]International Maritime Organt Sation MSC/Circ.645.Guidelines for vessels with dynamic positioning systems[S].1994.
[2]GOLDING B K.Industrial Systems for Guidance and Control of Marine Surface Vessels[M].NTNU,Norway,2004.
[3]杨世知.DP推进系统水动力干扰及最优推力分配算法研究[D].上海:上海交通大学,2010.
[4]JOHANSEN T A,FOSSEN T I,BERGE SP.Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming[J].IEEE Transactions on Control Systems Technology.2004,12(1):211-216.
[5]WEBSTER W C,SOUSA J.Optimum allocation for multiple thrusters[C]∥International Society of Offshore and Polar Engineers Conference(ISOPE-99),Brest,France,1999.
[6]WICHERSJ,BULTEMA S,MATTEN R.Hydrodynamic research on and optimizing dynamic positioning system of a deep water drilling vessel[C]∥Offshore Technology Conference,Houston,Texas,1998.
[7]BERGE SP,FOSSEN T I.Robust control allocation of overactuated ships:experiments with a model ship[C]∥Proc.of the 4thIFACConference on Maneuvering and Control of Marine Craft,Brijuni,Croatia,1997.
[8]YANG Shizhi,WANG Lei,ZHANG Shen.Optimal thrust allocation based on fuel-efficiency for dynamic positioning system[J].Journal of Ship Mechanics,2011,15(3):217-226.
[9]吴显法,王言英.动力定位系统的推力分配策略研究[J].船海工程,2008,37(3):92-96.
[10]张文霞.船舶动力定位系统控位能力计算算法研究与实现[D].哈尔滨:哈尔滨工程大学,2008.
[11]JIE Dang,HANSLaheij.Hydrodynamic aspects of steerable thrusters[C]∥Marine Technology Society,Dynamic Positioning Conference,Houston,2004.
[12]NIENHUISU.Analysis of thruster effectivity for dynamic positioning and low speed maneuvering[D].Delft,the Netherlands:Technical University Delft,1992.