某型仿生船水动力性能数值验证研究
2013-06-12上官纯飞侯国祥
上官纯飞,侯国祥
(华中科技大学 船舶与海洋工程学院,武汉430074)
仿生船在水面高速滑行时,由于部分船体脱离水面,处于临界起飞状态,与水面接触面积小,因而阻力小。仿生船船身宽大,为获得减小吃水深度的升力及力矩,在船身上装有附体结构,并在模型底部重心靠后位置形成一个断阶。在计算船舶水动力性能时,一般只需要考虑水域的影响。鉴于该模型的超高速特性,在数值验证过程中,加入了空气因素的影响,即在计算时,计入了气阻力和气动升力对模型水动力性能的影响,流体域包括液体和气体两部分。
1 理论基础
1.1 湍流模型
由于模型速度较高,故本文选取不可压缩重整化群RNG k-ε湍流模型以便控制计算精度,其控制方程为
式中:Gk、Gb——平均速度梯度和浮力引起的湍动能的产生项;
Sk、Sε——k和ε的源项;
αk、αε——k和ε的反有效普朗特数;
C1,C2和C3——经验常数[1],取值见参考文献[2]。
Rε为RNG模型和标准模型的主要差别,此增加项使得该模型极大提高了对急变流的预测精度,其表达式为

式中:β,η0,Cμ——常数;
η=Sk/ε。
2.2 VOF方法
流体体积法(VOF方法)追踪自由液面,其基本思想是通过构造一个流体体积分数函数F来追踪每个控制体内的流体流量,通过求解一套动量方程和连续方程模拟两种或多种互不掺混的流体的运动,并根据其函数值和导数值构造自由面形状。由于本研究只涉及气液两相,故流体体积分数函数的输移扩散方程为
在本研究中,输运方程中的特性参数在每一控制体中将由两种流态的组合来表示,根据文献[3]中处理两相流体密度ρ的方式,本文单元体的密度ρ表示为

使用VOF法是为了确定自由液面的位置和形状,以便最终观察模型浮态随时间的变化规律。
2 数值建模及计算方法
2.1 模型关键几何参数及划分网格
仿生船模型基本技术数据如下。
质量30.671 296 kg;最大速度14.594 m·s-1;
船宽0.283 m;船长3.166 7 m;
船高0.375 m;绕Y轴惯性矩7.696 kg·m;
重心坐标X:1.264 6 m,Y:0.001 5 m,Z:0.243 2 m
流体模型长17 m,宽3 m,高2 m。
该仿生船包含主体和附体结构,本文研究的重点是其在水面高速运动时的浮态和转角,因而将附体结构舍去以简化计算模型,且附体结构在不同速度下所提供给船身的力和力矩,则在力的矢量运算和积分后以施加在船身重心上的力和力矩来取代。
网格是CFD模型的几何表达式,也是模拟与分析的载体,网格质量和数量对CFD计算精度和计算效率有着重要的影响[4],用gambit前处理软件对流场区域进行网格生成。
由于该仿生船模型流场的几何形状极其不规则,因而采用混合网格对整个流场区域进行离散。其中,刚体运动区域(近场)采用适应性很强的非结构网格(四面体网格),见图1,远场采用结构化网格(六面体网格),见图2。此外,刚体周围的网格尺寸较小并使用均匀网格;远离刚体的区域网格尺寸较大并采用非均匀网格,从内到外尺寸逐渐增加[5]。
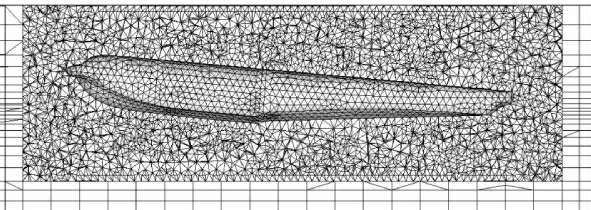
图1 刚体运动区域(近场)网格划分

图2 远离刚体运动区域(远场)网格划分
2.2 初始条件和边界条件
在Fluent设置时,模型表面以及侧壁面和下边界定义为无滑移壁面边界条件(wall);上游定义为速度进口(velocity inlet)边界条件,指定来流速度沿X轴方向,其它两个方向的速度为零;下游定义为出流(outflow)边界条件。图2中近场和远场的交界面定义为interface,可以产生相对滑移。
2.3 计算过程中的流场加速控制
由于本数值验证需要计算模型1~13 m/s多种速度的情况,因此采用在上一个低速的计算结果上对流场加速的办法,以便刚体快速进入稳定状态。如图3对流场速度的监测曲线所示,流场在速度零达到平衡后首先开始加速15 s,速度从零增加1 m/s,此后,流场每计算9.5 s达到平衡后再加速15 s达到下一个速度,如此反复直到最大速度为止。
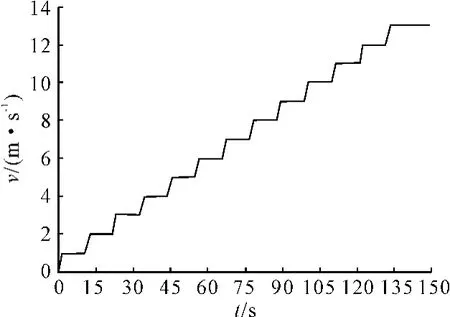
图3 流场速度监测曲线
3 计算结果
3.1 结果对比及分析
模型在该工况下的速度、深沉和转角对比见表1。
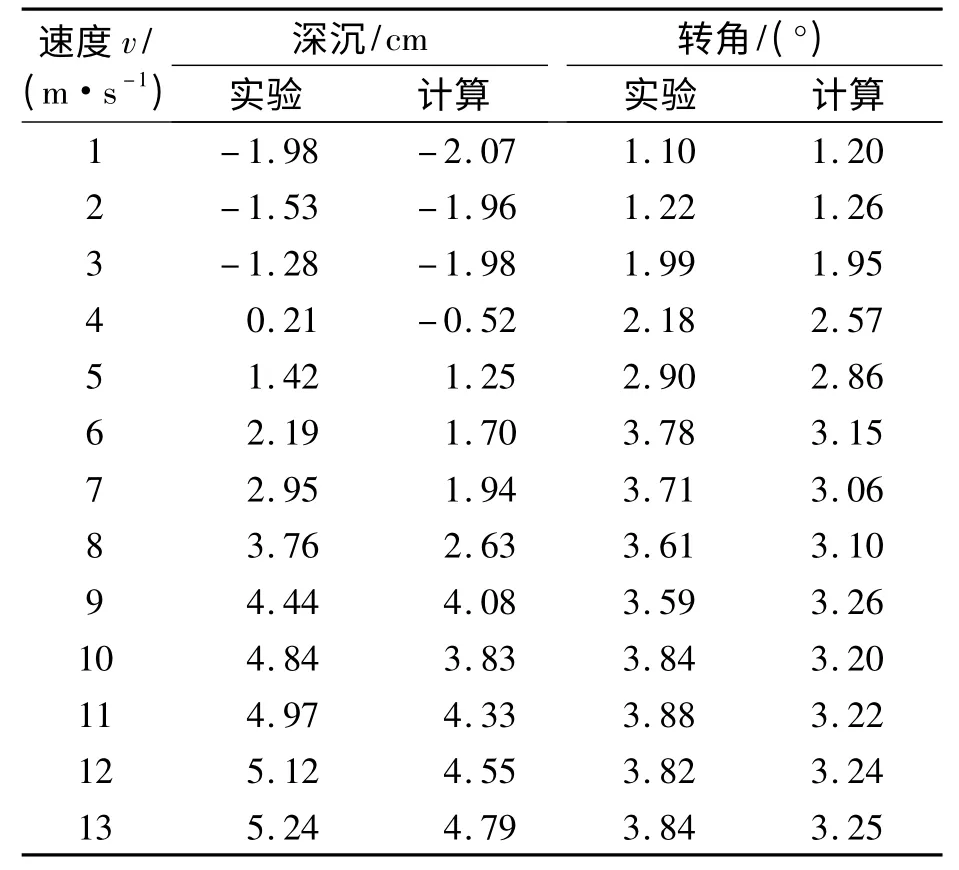
表1 计算结果及对比
对比发现,在深沉和转角这两项上,除个别速度外,实验数据和CFD数据差别不大,误差在允许的范围之内。
深沉与转角在试验和CFD计算中的大小和变化趋势大致相同或相似,见图4、5,误差都控制在一定范围以内。即深沉的最大误差为1 cm左右,转角的最大误差为1°以内。
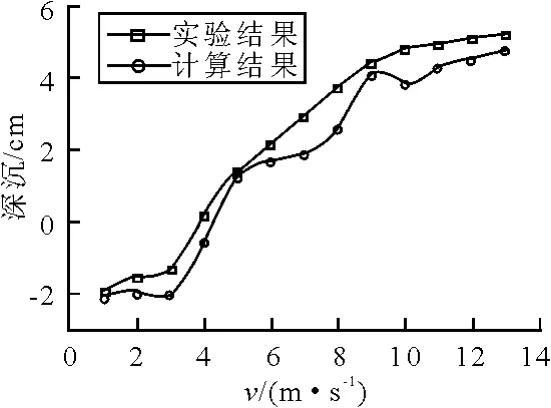
图4 深沉结果对比分析
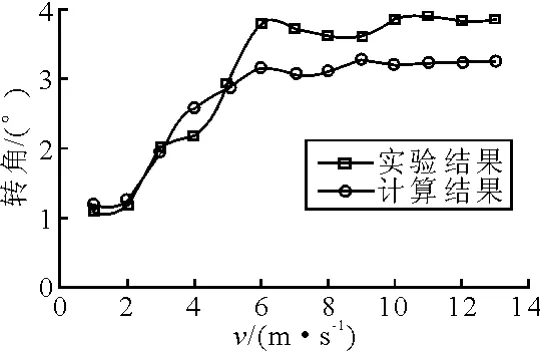
图5 转角结果对比分析
由图4可见,模型在低速状态下,深沉没有明显变化,进入中高速以后,深沉会随速度逐渐递增,当速度最大时,附体结构提供的升力和力矩达到最大值,船身艉倾,此时的深沉也达到峰值。
由图5可见,在低速段随着速度的增加,模型转角逐渐增大,进入中高速以后,由于已经达到最大仰角,故其转角逐渐趋于常值。
3.2 浮态及压力分布
模型在水面运动时,由于受到附体升力和船体上下表面的压力差,船艏会逐渐脱离水面(自由液面),以此减小行驶过程中的阻力。见图6,随着速度的增加,附体升力越大,船体上下表面的压力差越大,船身会逐渐抬离水面(自由液面),吃水深和纵倾角的变化相应也越大,当达到最大速度时,船艏已完全离水,船艉部分浸入水中,此时模型以稳定状态航行,吃水深度和纵倾角不再变化。

图6 船体典型速度下平衡时的自由液面
如图7所示,模型在运动过程中,由于其形状不规则,船体底部水流速度变化较大,必然导致艏艉压力分布不均匀,艏艉压力差与附体提供的力矩一起造成了船体纵倾角的变化;来流速度越大,艏艉压力差越明显,纵倾角的变化也就越大。同时,由于船体底部与顶部流体介质不同,压力故而不同,上下压力差与附体提供的升力一起造成了船体吃水深度的变化。

图7 船体典型速度下平衡时的压力分布
3.3 断阶区域压力分布
由于船底部有断阶的存在,不仅可以减小水的阻力,而且在水面高速运动时,可以减小水对船体的吸附力,并不致引起船体在高速航行中跳跃(海豚运动)。如图8所示,断阶的存在造成了该区域压力的骤降,而且随着速度的增大,断阶区域也会逐渐增大,区域内压力会逐渐减小,从而影响船身上下的压力差,改变吃水深度。
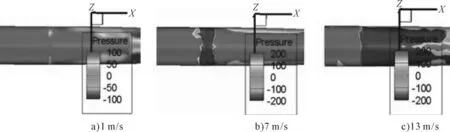
图8 船体典型速度下断阶区域压力分布图
4 结论
数值模拟结果与船池拖曳实验数据吻合得非常好。因此在实际工程中可以利用CFD软件对高速刚体的水上性能进行预测分析,在没有拖曳实验条件的情况下,同样也可以直观地对其水动力性能进行分析,这种方法在快艇,水上滑板等高速刚体的数值仿真中都能有所应用。
[1]朱 嵩.基于RNG k-ε湍流模型的直接空冷岛数值模拟研究[J].企业技术开发,2010,29(15):45-46.
[2]黄苗苗,李国君,匡晓峰.水环真空内部气液两相流动的数值分析[J].船舶力学,2011,15(7):722-729.
[3]郭晓宇,王本龙,刘 桦.低充水液舱晃荡气垫效应的数值分析[J].水动力学研究与进展,2011,26(5):623-630.
[4]罗晓园,李 新,郑锐聪,等.基于CFD分析的调距桨水动力性能研究[J].船海工程,2012(4):81-84.
[5]王福军.计算流体动力学分析——CFD软件原理与应用[M].北京:清华大学出版社,2005.