行车大车行走机构设计改进*
2013-06-09孙广辉王华勇
孙广辉,王华勇
(浙江龙盛薄板有限公司,浙江上虞 312369)
行车大车行走机构设计改进*
孙广辉,王华勇
(浙江龙盛薄板有限公司,浙江上虞 312369)
针对行车原设计中存在严重啃轨、输入驱动断轴问题,通过对原驱动方式的受力分析,计算出原传动所提供的扭矩,将原双驱动方式更换为四驱动,同时更改原行车行走轮结构形式,生产实践证明,此改进可降低设备故障率,节省检修费用。
行车大车;行走机构;啃轨;参数选配
1 概述
某厂使用的罩式炉上方行车(规格:40T+ 10TQD电动双梁桥式起重机,厂内编号为9#、10#行车),由主小车(起重量40 t)与副小车(起重量10 t)两部分组成,主小车用来将冷轧机轧制、翻卷机翻卷完成的料通过9#、10#车用立式夹具夹紧后挨个装入炉台,副小车用专用垫板夹具夹紧垫板后将垫板放至两个相互重叠卷之间,以防止退火时两个卷之间发生粘连现象,同时行车还需将退火完成的卷用夹具挨个吊至地爬车运至平整生产区域。
2 行车存在的问题及分析
由于罩式炉行车使用频率及罩式炉区域温度比其它区域普遍高,行车在设计上考虑的设备工作系数偏小,在现有工作频率下使用存在着严重啃轨、输入驱动轴断现象,平均每个月需更换一副主动轮、发生一次断轴现象。严重影响罩式炉和后道平整机组工序的正常生产,同时对罩式炉的安全生产产生了严重威胁。
鉴于以上存在的问题,经过深入分析阐述如下:原车为单边双驱动,在行车行走过程中,两边驱动电机存在着速度不同步现象,在行车整个行程中,此种不同步随行走距离逐渐累积,当两边不同步超过一定距离时,导致行车整体扭转而发生啃轨现象,同时当行车在吊重物运行时,由于行车大梁的整体变形,啃轨现象越发明显,当啃轨严重时,行走轮25 mm凸起边缘在不到1月时间内就会被磨平,同时,由于啃轨的承在,加大了行车主动轮的驱动阻力以及啃轨时载荷的冲击,驱动轮输入轴也会经常性断裂。
3 改进措施
为改善此种缺陷,经严密论证分析决定将原有单边双驱动改为双边四驱动,从而使行车正反运行过程中,确保整台行车四只角速度的同步性,减少或消除此种啃轨现象。改进设计方案如下。
(1)原驱动参数:电机15 kW,电机转速730 r/ min,速比i=15.75,其齿轮传动效率为η=0.94[1],制动力距280 N·m,其驱动扭距计算如下:

式中:P为电机功率,kW;N为电机输出轴转速,r/ min。计算结果:因为2台电机驱动,故总的驱动扭距为: 2 905.22×2=5 810.44(N·m)
改为双边四驱动,在保障原有驱动扭距不变的情况下,每台电机的驱动扭距应≥6 181.33/4,即为: 1 452.61 N·m。
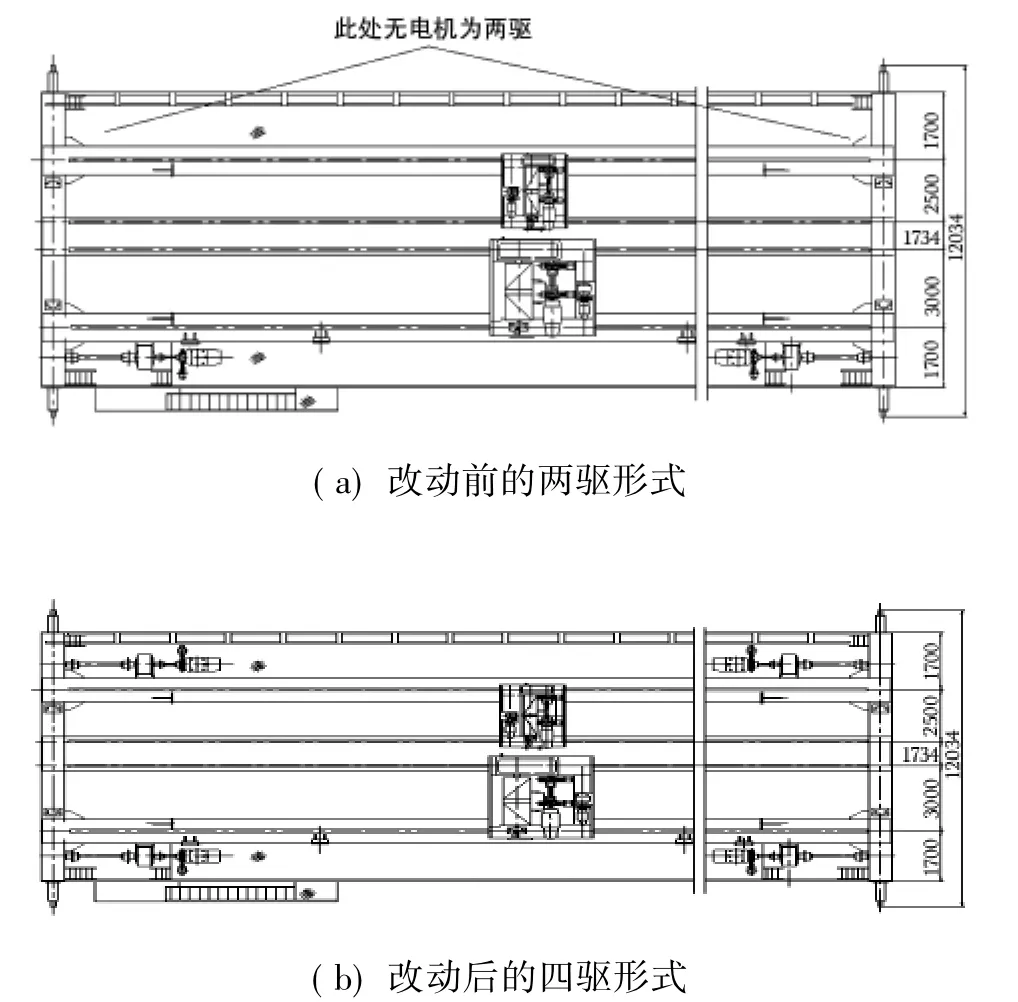
图1 行车的设计改进图示
(2)根据原有设计,只要保证每台电机的驱动转距符合上述值,行车行走应无问题,现选用三合一式电机减速度,每台电机功率为7.5 kW,转速为1 455 r/min,减速比为30.85,根据公式计算如下:
由计算结果发现驱动扭距没有问题,转速比较:原输出转速为:730/15.75=46.35 r/min,现有转速为:1 455/30.95=47 r/min,与原有工作效率相当。
根据企业现场实际使用情况,每小时行车起动、停止次数在10次以上,且为强烈冲击载荷,每天24 h工作制,被驱动设备系数选为f1=2[2],故所选减速机的最大允用功率必须大于 P1N=P×f1=7.5×2=15 kW,当允用最大功率≥15 kW时,减速箱可以正常工作,与宁波东力减速机样本选择型比对,故选用的减速机型号为DLKA08-47/YZPE132M-4-M2-L-7.5 kW,其最大允用功率为35.05 kW≥15 kW,输出转速为47 r/min,减速比为i=30.95,原有理论值相符较好,满足此种工作环境,因其为三合一电机,即抱闸、减速箱、电机三者合一,此种型号的电机减速箱单台抱闸力距为:1 520 N·m≥280 N·m,且其抱闸力距可以根据实际情况予以调节,故在制动安全性方面能远胜过原有安全性。在以上条件满足的情况下,为解决主驱动轮输入轴断的问题,在主动轮输入轴与电机减速机输出轴之前间加装弧形齿联轴器,在主动轮受到冲击时,可由联轴器减缓部分冲击,从而达到增加输入轴寿命的目的。
考虑原行车在主梁设计时选料安全系数较低,导致吊车在重负荷运行时主梁变形较大也会引起啃轨,故在此将原有主驱动轮结构也略作改变,将原有车轮工作面宽度有效宽度从110 mm加宽到130 mm,如图2所示,以抵效主梁变形向外扩张部分的位移。
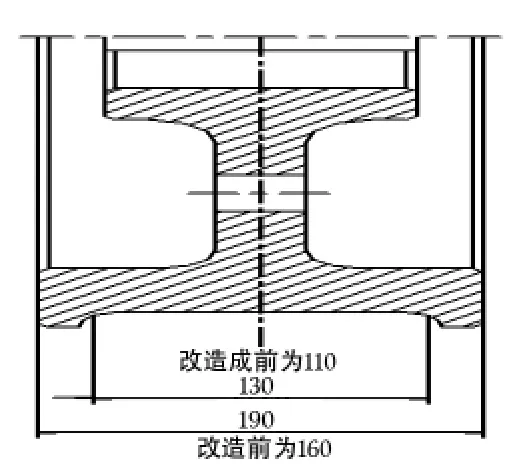
图2 行走轮改动图
4 结语
因行车属于特种作业设备,以上改造报批绍兴市特种设备检测院后实行,从2010年改造完成后目前使用近三年来,再未出现过啃轨、断轴问题,此故障被彻底解决。
[1] 成大先.机械设计手册[M].第四版.北京:化学工业出版社,2002.
[2] 国家质量监督检验检疫总局起重机设计规范(GB3811-83)[S].2005.
Design Improvement of the Walking Mechanism in Bridge Crane
SUN Guang-hui,WANG Hua-yong
(Zhejiang Lonsen Steel Strip Co.Ltd,Shangyu Zhejiang 312369,China)
Aiming at the problem existing the serious rail gnawing and input drive shaft breaking,through the analysis of old driving mode in bridge crane,the troque of the old mode is calculated and the old two-motor driving mode should be changed to four-motor driving mode.The structural style of the driving wheel also should be changed.It is proved that this improvement could reduce the failure rate and the cost of examining and repairing of the equipment.
bridge crane;walking mechanism;rail gnawing;parameter selection
TH122
B
1007-4414(2013)05-0158-02
2013-08-12
孙广辉(1979-),男,黑龙江龙江人,助理工程师,主要从事冷轧生产设备管理和技术方面的工作。
