一种斜推式爬墙机器人的分析与设计*
2013-06-09韩奉林刘曼玉张瑞强
徐 聪,韩奉林,刘曼玉,张瑞强,陈 帅
(中南大学机电工程学院,湖南长沙 410012)
一种斜推式爬墙机器人的分析与设计*
徐 聪,韩奉林,刘曼玉,张瑞强,陈 帅
(中南大学机电工程学院,湖南长沙 410012)
为解决爬墙机器人载重小、效率低等问题,提出了一种利用涵道风扇的斜推力使机器人吸附在墙面的爬墙原理,并制作了一款样机验证原理的可行性。这种爬墙机器人的风扇推力与墙面之间有一个夹角,将推力分解成沿墙面竖直向上的分力和垂直于墙面的附着力。机器人依靠风扇向上的分力和因附着力产生的摩擦力的合力而停附在墙面。通过实验,机器人停附在墙面上所需推力小于自身重力,推力的利用率高。
爬墙机器人;涵道风扇;斜推力;吸附
1 引言
随着人类的建筑物高度不刷新,高层建筑的各种问题随之而来,高层建筑的维护、救援成了一个棘手问题[1-2]。除了建筑方面,在诸如造船、石油化工等工业领域[3-4],高空极限作业也成了不可避免的工作。正是在这种背景下爬墙机器人应运而生。
现有的爬墙机器人大部分依靠吸盘吸附方式[5],对墙面要求高,大部分依靠步行前进[6],行进速度缓慢,实际应用不理想。还有一种依靠喷气正压力使机器人与墙面间产生摩擦力从而停留在墙面的原理。这种爬墙机器人虽可利用目前非常成熟的大功率喷气类发动机,但是大部分物体间的摩擦系数都在0.3~0.8之间[7],机器人停留在墙面的推力是机器人自身重力的2倍左右,显然比较困难。因此在实际应用中,这种机器人一般通过绞盘缆线悬挂,风扇所提供的仅是贴附力,实际应用存在诸多不便[8]。
笔者所讨论的爬墙机器人是一种基于笔者所提出的斜压式新型爬墙原理,机器人依靠风扇向上的分力和因附着力产生的摩擦力的合力而停附在墙面。
2 斜推式爬墙机器人原理
斜推式爬墙机器人主要由底盘和旋动喷气装置组成,能在任意角度的平面内360°行驶、转向以及悬停。通过增加相关附件,可以在墙面、棚顶等极限环境进行清洗、检查等工作。
机器人的升力由风扇产生,风扇与车体之间有一夹角,推力被分解成沿墙面竖直向上的分力和垂直于墙面的附着力,见图1(a)所示。机器人的总升力为风扇向上的分力和因附着力产生的摩擦力之和。要保证风扇的推力在一定范围之内以免机器人发生滑动。在墙面上时,机器人的重力与风扇推力会产生一个扭转力矩,因此需合理的设计机器人结构才能保证机器人不发生倾覆。机器人在墙面转向行驶时,必须要保持风扇的推力方向始终向上,通过合理设计,依靠风扇和电池的自重力,很巧妙的实现了风扇自重力竖直。
2.1 升力与附着力计算
为了便于计算,将机器人的受力状态用一个在墙上受到一斜向上推力F作用的物体代替见图1(b)所示。物体受到向上的合力为F升,当摩擦力方向向上时,F升与风扇和车体间夹角θ及轮胎和墙面间摩擦系数μ的关系为:


当θ为最佳偏转角时,机器人的总升力F升是风扇推力F的倍,见图1(b),所需最小推力比自身重力小。引言里所提到的采用正压力吸附的爬墙机器人,则需自身重力1.5~3倍左右的推力。因此采用斜推方式,风扇推力的利用率被大大的提高了。
机器人的附着力大小为F附=F·cos θ,附着力在这里保证了机器人能很好的帖附于墙面,不能随意滑动。同时,在机器人行进过程中,因贴附力所产生的摩擦力充当了机器人前进时的轮缘牵引力。
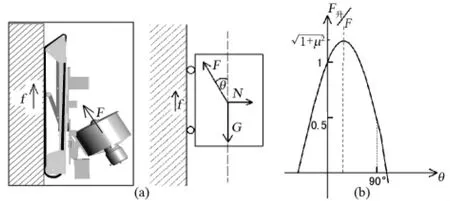
图1 基本原理图
2.2 抗滑移分析
为保证机器人在墙面的平稳运行,一定要防止车体在墙面上发生滑移,因此要保证风扇的推力在一定范围之内,风扇推力过大轮胎与墙面之间将发生滑动摩擦,机器人将向上滑动,反之,当推力不足时将向下滑移[7]。
下面以保持风扇偏转角最优(即θ=π/2-φ)时,计算风扇推力范围。
(1)最小推力Fmin
为对以上各式有更直观的认识,取橡胶与粗糙水泥的摩擦系数μ=0.5[9]为轮胎与墙面之间的摩擦系数时,风扇在竖直平面最佳偏转角θ=26.56°,机器人获得升力F升为1.12F,附着力F附为0.45F,风扇推力范围为0.89G~1.49G。
2.3 抗倾覆分析
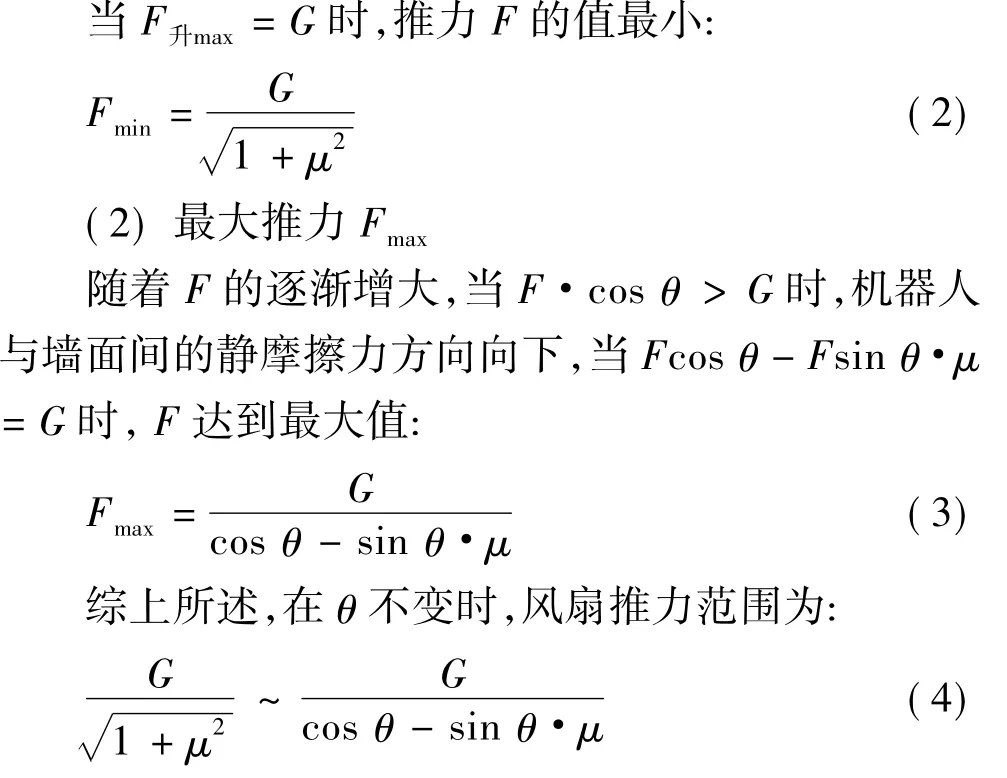
斜推式爬墙机器人风扇推力和重心与车体平面不重叠,将会产生一个易使机器人倾覆的力矩,下面结合图2分析机器人在墙面上的受力情况:
(忽略轮胎摩擦力矩的影响)

式中:H、h分别为风扇作用点及重心距离车体表面高度;L为前后轮轴距;l为风扇距后轮轴距离。
图2 受力分析

当机器人轴距L和l满足上述关系时,机器人前后轮与墙面压力相同,车体不会发生倾覆趋势。
由上式可以发现,车体倾覆发生的原因主要与轴距L和l大小有关,既与风扇的位置有关。
2.4 风扇自重力竖直原理
机器人在墙上转向时,为确保机器人在车体发生偏转时仍然能够安全的贴附于墙面,须始终保证风扇推力的方向不变,风扇不能随车体底盘一起偏转。其中一种方案是设计一个可绕底盘中心轴自由旋转的支架,并将风扇和电池置于支架后方,使其重心远离旋转中心(见图3)。如果不考虑风扇推力影响,支架整体会像一个重力摆一样永远保证竖直。考虑到风扇有远大于支架本身重力的推力,因此做以下分析。
风扇有向上推力,其作用方向指向旋转中心O (见图3),当车体偏转时,假设支架中心线与竖直方向有一偏角δ,此时重力P的方向已不再指向旋转中心O,P将产生一个回复力矩M,满足以下关系:

式中:P、k分别为支架、电池、风扇总重量及其重心与旋转轴之间的距离;Mf为风扇因装配误差产生的推力偏心力矩及旋转轴摩擦力矩之和,是个很小的值。由于Pk比Mf大很多,因此支架偏转角δ非常小,无论车体如何偏转,支架与竖直平面的夹角始终控制在这个很小的偏转角内,风扇推力的方向没有受到明显影响。

图3 风扇自重力竖直原理
3 新型爬墙机器人结构
3.1 基本结构
爬墙机器人主要由底盘和旋动喷气装置两部分组成见图4。底盘是保证机器人在壁面运行的装置,旋动喷气装置则保证了机器人稳定地帖附在墙面上。下面对底盘和旋动喷气装置进行介绍。
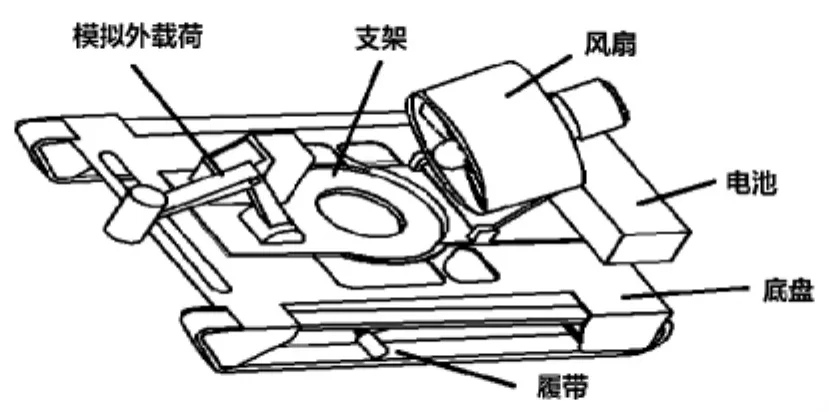
图4 机器人结构
底盘包括动力、传动、推进、转向、控制等部分。由直流电机通过带有自锁功能的蜗轮蜗杆减速器驱动。减速器的自锁功能保证了车体在墙面静止工作时可以稳定的帖附于墙面上,不能产生滑动。机器人的推进方式可为两种:轮式推进和履带推进。采用轮式推进,结构简单、行驶方便、快捷。采用履带推进可以增强机器人的越障能力和附着力,适合应用在更恶劣的环境。
旋动喷气装置以一支架为主体,集中安装有风扇、电池等部件。风扇可以在支架上俯仰偏转从而使其适应不同角度的平面。支架通过可自由旋转的轴与底盘相连,风扇和电池安装在支架后方,当车体在墙面上转向时,支架依靠重力可以实现自动竖直,保证了风扇的推力始终向上。
3.2 结构设计
(1)总体设计要求
设计流程如图5所示。确定机器人设计要求:空重≤500 g,载重≥50 g,总尺寸不大于300×250,控制距离≥50 m,续航时间≥10 min。

图5 设计流程图
(2)确定相关参数
如在式(4)中,取橡胶与粗糙水泥的摩擦系数取μ=0.5,根据式(1)风扇偏转角θ=26.56°,取标准推力F=1.2G。H由风扇半径R和支架高度Δ确定:

根据设计要求,选取64涵道式风扇,标配2 200 mAh电池和2 000 kV的电机,风扇标准推力为700 g,半径为32。旋转支架高度Δ在5~10,所以H= 35。h=H/3≈12h由车体、电池、风扇之间的重量和位置关系决定,通过估计计算得:
由以上相关参数,结合式(7)得:

当N1-N2=0前后轮对墙面压力相等,车体受力平衡,此时L与l的关系为:

根据风扇、电机和电池尺寸,l的范围为:

式中:风扇宽度M=25,电池宽度b=15,所以l>35。
依据设计要求总体尺寸在250×200之内,所以选取l=35,此时轴距L=165。
为确保车体在墙面任何方向上自由行使时均不发生倾覆,我们取轮距B=L,则B=165。最终确定车体主要参数如表1所列。

表1 斜推式爬墙机器人主要尺寸
4 样机验证
为了验证这种斜推式爬墙原理的可行性,最终利用专业航空模型上使用的风扇、电池、控制器等部件,制作出原理验证实物。
采用实地实物的测试方法对机器人的基本情况进行测试。在没有更新电源的情况下,机器人分别在一块墙面和一块平整的石头上进行了行驶、转向、静止共计2'30″的测试(见图6)。在测试中,机器人运行正常,没有出现滑动、倾覆现象,吸附性能良好。
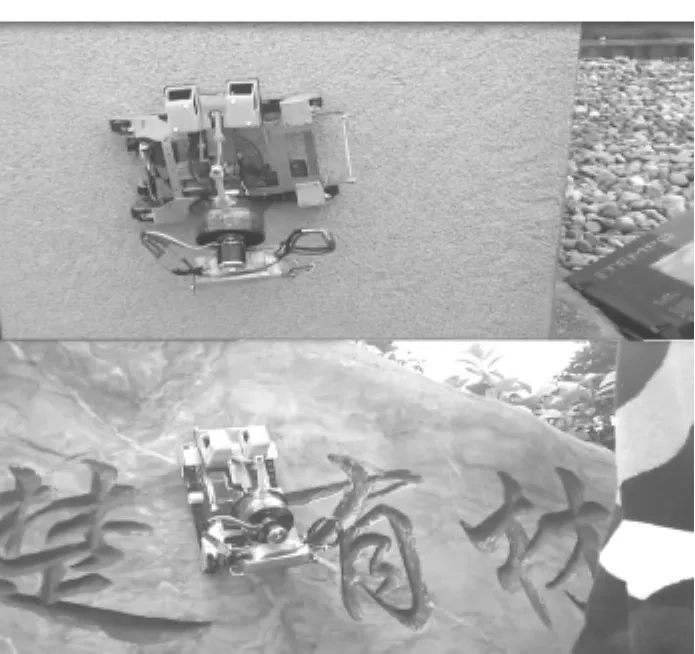
图6 实物演示
实验结果表明:该机器人只需依靠自身携带的电池,便能很好地吸附在墙壁甚至石头上,能实现平面内360°行驶。斜推式爬墙机器人在墙面适应性、运行速度、可靠性方面具有很大优势,达到了初步的设计目的。
实验过程中也发现了一些不足之处,首先是风扇的震动比较强烈,噪声较大。其次是由于风扇转动时会有一个逆向力矩给车体,造成了机器人两侧履带与墙面之间的抓地力不同,使机器人在转向时受到影响。在后续的工作中将在这两方面进行改进。
5 结语
利用风扇斜推力使机器人停留在墙面,在爬墙类机器人的研究中这是一种新的尝试。它对墙体表面没有特殊要求,对风扇推力利用率又较高,可以采用快速的轮式或履带推进方式,具有一定越障能力,适用性较强。另外还可以广泛采用航空领域成熟的技术,利于将这种爬墙机器人推向一个广阔的发展应用平台[10]。
[1] 江 励,管贻生,蔡传武,等.仿生攀爬机器人的步态分析[J].机械工程学报,2010(10):18-22.
[2] 刘明芹,戴永雄,黄文攀,等.小型吸附式爬壁机器人机械结构及平衡性[J].机械设计及制造,2011(5):146-148.
[3] 王园宇,武利生,李元宗.壁面清洗机器人发展趋势浅析[J].引进与咨询,2002(4):3-4.
[4] Kim S A T.Asbeck M R.Cutkosky W R.Provancher SpinybotII: Climbing hard walls with compliant microspines[C].IEEE ICAR,Seattle,WA,2005:601-606.
[5] 潘裴林,韩秀琴,赵言正,等.日本吸附移动平台的研究现状[J].机器人,1994,16(6)379-382.
[6] Juan Carlos Grieco,Manuel Prieto,Manuel Armada,Pablo Gonzalez de Santos.A six-legged climbing robot for high payload[C].Proceedings of IEEE International Conference on Intelligent Robots and Systems,Trieste,WA,1992:446-450.
[7] 秦大同,谢里阳.现代机械设计手册[M].北京:化学工业出版,2001.
[8] 史 强,李 露,邱自学.悬吊式高空消防机器人的设计及姿态控制原理[J].机械设计与制造,2013(1):162-164.
[9] 孙建林,萧田国,黄立宇,等.橡胶轮胎与路面间摩擦模型及分析[J].青海大学学报,2004(4):2-5.
[10] 杜 辉,陈葆实,胡国荣,等.风扇/压气机气动设计系统建设初探[J].航空动力学报,2007,22(3):453-459.
Analysis and Design of a Wall-climbing Robot Relying on Oblique Thrust
XU Cong,HAN Feng-lin,LIU Man-yu,ZANG Rui-qiang,CHEN Shuai
(College of Mechanical and Electrical Engineering,Central South University,Changsha Hunan 410012,China)
In order to improve the loading capacity and effciency of the wall-climbing robot,the theory about how to have the robot adsorbed on the wall by making use of the oblique thrust of the culvert fan is put forward.And the model machine is used to test and verify the feasibility of the theory.There is an included angle between the fan's thrust and wall space.So the thrust can be divided into two parts:the upward component force along the wall and the adhesive force perpendicular to the wall,and then the former one and the friction force caused by the latter one will be composed to make the robot on the wall.The conclusion can be reached by experiment research that when the thrust keeping the robot on the wall is less than its own gravity,the effect of the thrust is better.
wall-climbing robot;culvert fan;oblique thrust;adsorb
TP24
A
1007-4414(2013)05-0110-04
2013-08-13
徐 聪(1991-),男,辽宁鞍山人,在读本科,研究方向:机械设计、创新设计。