单矢量水听器MUSIC估计与互谱估计的性能比较研究
2013-06-08钱富程锦房方石
钱富,程锦房,方石
(1. 海军工程大学,武汉 430033;2. 海军驻宜昌地区军事代表室,湖北宜昌 443003)
0 引言
传统的水听器只是接收了声场中的声压信号,而在声场中,描述其特性的物理量还有振速、位移、声压梯度等等,声压是一个标量,所以在形成线阵时,会出现左右弦模糊问题。矢量水听器作为新型的水声测量设备,在结构上它由无指向性的声压传感器和偶极子指向性的质点振速传感器复合而成,不但可以测量声场中的声压,而且还可以直接、同步测量声场同一点处流体介质质点振速矢量在笛卡尔坐标系下的x、y、z轴向投影分量,还可以对采集数据进行方位估计。矢量水听器与传统声压水听器相比,主要优点有[1]:
1)能对目标进行定向;
2)具有较强的抗干扰性,同时能够增大水下探测目标的距离;
3)不会出现左右弦的模糊问题;
4)与传统的探测设备相比,在相同的技战术指标下,单矢量水听器减小了尺寸和重量。
正是矢量水听器的诸多优点,使得近年来其得到了蓬勃的发展。岳剑平等人在2004年对单矢量水听器的互谱估计进行了研究,张亮等人在2009年对单矢量水听器互谱测向的多目标分辨进行了研究,袁志勇等人在2010年对单矢量水听器四阶累积量MUSIC算法进行了信号DOA估计。基于此,本文对单矢量水听器的MUSIC估计与互谱估计的性能进行比较研究。
1 MUSIC算法的基本原理
MUSIC算法的基本思想则是将任意阵列输出数据的协方差矩阵进行特征分解,从而得到与信号分量相对应的信号子空间和与信号分量相正交的噪声子空间,然后利用阵列流形和噪声子空间的正交性来估计信号的参数。
在理想情况下,N个远场窄带信号入射到空间M元的阵列上,阵列接收窄带远场信号的数学模型为[2]:

式中:A(θ)是空间阵列的M×N维流形矩阵;X(t)是阵列的M×1维噪声数据矢量;S(t)是空间信号的N×1维矢量;N(t)是阵列的M×1维噪声数据矢量;则阵列数据的协方差R可以分为与信号、噪声相关的两部分,即:

其中,“H”表示取共轭转置。此时的信号子空间与入射信号的导向矢量张成的空间是同一个空间。在理想条件下,入射信号的导向矢量与噪声子空间正交。实际上对R进行特征分解计算得到的噪声子空间特征矢量和导向矢量a(θ)并不能完全正交,因此实际上求DOA是以最小化搜索实现的,即

则空间谱P(θ)的表达式为

2 单矢量水听器的阵列流形
本文仅考虑一维问题,即矢量水听器输出同点的声压p和正交的二维振速vx,vy,则测量方程可以表示为[3]

式中:x(t)为声源信号的包络;为声压噪声信号,为x轴的振速噪声信号,为y轴的振速噪声信号;θ为入射声波的水平方位角,其取值范围为。假设目标信号是由N个不同频率的单频水下声波构成,传播介质各向同性,则该信号入射到矢量水听器上,其第k个水声信号在矢量水听器上的阵列流形a(θk)表达式如下

其中,“T”表示取转置。a(θk)的第2和第3个分量对应于矢量水听器两个振速通道,第一个分量对应于矢量水听器声压通道输出。
3 基于MUSIC算法的单矢量水听器方位估计
首先通过采样接收三路数据产生一个3×L维的矢量水听器矩阵X(t),L是数据采样点数,在这里,X(t)满足(1)式接收数据模型,此时A(θ)为3×L维的流形矩阵,其表达式为

其中,a(θk)为(5)式所示的第k个水声信号的单矢量水听器阵列流形。将单矢量水听器接收数据X(t)的协方差矩阵R进行特征分解,并假定UN是其特征分解后小特征值对应的特征矢量张成的空间,此时构造入射信号的导向矢量a(θk)如下:

显然,若导向矢量a(θ)指向信号子空间时,其必与噪声子空间UN正交,则利用(4)式即可得到单矢量水听器MUSIC算法的空间谱估计表达式。与经典MUSIC算法一样,本方法也需要进行空间谱搜索。在算法实现时,将待搜索的范围分成等间距的单位Δθ进行方位谱搜索。因此得到估计的精度也与搜索步长Δθ有关在足够的信噪比条件下,Δθ越小,精度越高。
4 互谱测向原理
互谱测向原理是利用复声强测向,是声压、振速互谱处理器。
对P(t)及Vi(t)(i=x,y)做FFT变换,得到相应的谱为P(ω)及Vi(ω),则声压、振速互谱为[4]:

式中:符号*表示共轭运算。
运算时,用FFT代替了Fourier变换。
在海洋信道中,近似满足声学欧姆定律,声压和振速是同相位的。根据Fourier变换的基本特性,2个同相位输入的能量集中在互谱的实部,所以目标信号能量集中在复声强器互谱输出的实部,虚部中主要为干扰能量。令[5]:

根据式(10)和式(11)可以求出目标声源的水平方位θ为:

根据式(12)可计算每个频率的方位,因此根据目标辐射不同频率的线谱[6],就可以分辨多目标的方位。
5 计算机仿真与分析
仿真中噪声为零均值高斯白噪声,信号为1000 Hz的单频信号,采样频率3000 Hz,方位角为θ=60.0°,搜索步长Δθ=0.02°,采样点数为3000个。
利用上述相同条件,在不同信噪比下(-10 dB SNR<40 dB),对单矢量水听器的MUSIC算法进行了不同搜索步长(Δθ=0.2°和Δθ=0.1°)的估计标准差比较,如图1所示。
从图1可知,MUSIC算法得到的方位估计标准差与搜索步长有关。在搜索步长相对比较大时,得到的方位估计标准差仍然比较小。
在足够大的信噪比(SNR<20dB)下,搜索步长越小,其得到的方位估计精度就越高。
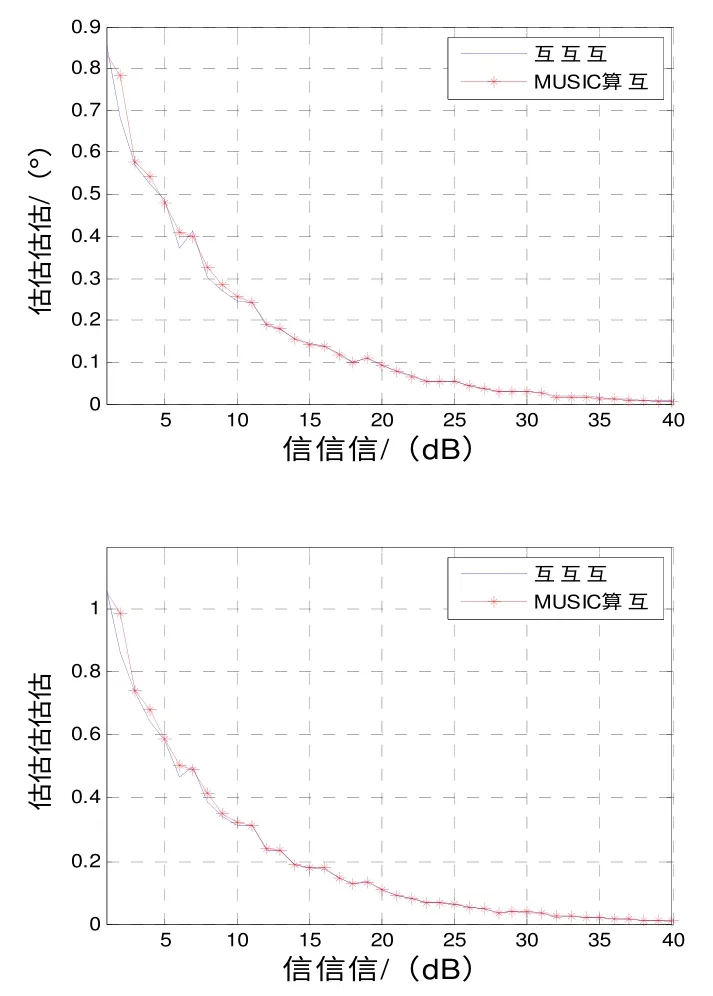
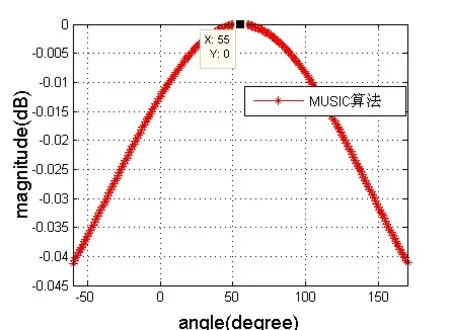
利用上述条件,在低信噪比下(-20 dB 图1 对搜索步长为0.2°和0.1°进行方位估计标准差的比较 图2 MUSIC算法和互谱法在相对低信噪比下的方位性能比较 从图2可知,在不同信噪比下,方位估计的性能曲线。为了方便比较,同时给出了互谱法的方位估计偏差和方位估计标准差。可以看出,在相对低信噪比下(SNR<-10 dB),MUSIC算法的方位估计精度要高于互谱法。因此,单矢量水听器的MUSIC算法可以用于远距离方位估计。 利用上述相同条件,在高信噪比下(0 dB SNR<40 dB),对单矢量水听器的MUSIC算法和互谱法进行了估计偏差和估计标准差的比较,如图3所示。 从图3可知,在信噪比相对高时(SNR>10 dB),MUSIC算法和互谱法的方位估计偏差都小于0.9,方位估计标准差都小于1.1,并且有比较好的性能。即在近距离的方位估计中,MUSIC算法和互谱法的方位估计性能相似。 图3 MUSIC算法和互谱法在相对高信噪比下的方位性能比较 为了验证基于单矢量水听器的MUSIC算法的工程实用性,于荆门漳河水库进行了水下机器人模型激励振动噪声试验。试验中用的矢量水听器为同振式矢量水听器。 为满足在声场测量时的远场条件,降低湖底混响,避免环境及航船噪声对测量的影响,在试验中选择了深约30 m的一处开阔水域。水下机器人模型吊入水下约6 m,矢量水听器从工作船尾部向外伸出约6 m,距水下机器人模型中心约7.9 m,水下机器人模型的激振器位于中舱,该激振器由一电动机驱动,在激振器频率设置为180 Hz时(实际测量该激振器发出的频率为178.8 Hz,3 dB带宽约2 Hz),从该激振器开始启动到结束的整个过程的辐射噪声进行了采样,采样频率为3 kHz,采样时间为94 s。 利用漳河水库采集的数据,在上述的条件和信噪比为-10 dB的情况下,进行了单矢量水听器的方位估计,如图4所示。 从图4可知,由MUSIC算法得到方位估计为55.0°。由互谱法得到方位估计为46.4°。二者的偏差在允许误差范围以内,方位估计角度与实际值相近,所以单矢量水听器的MUSIC算法与互谱法可以用于实际目标方位估计,具有一定的工程应用价值。 图4 由MUSIC算法处理湖试数据得到的空间谱 本文介绍了MUSIC算法与互谱法的基本原理,单矢量水听器的阵列流形[7]。利用该MUSIC算法与互谱法进行了估计性能的比较,在相对低信噪比下(SNR<-10dB),MUSIC算法的方位估计精度要高于互谱法,说明单矢量水听器的MUSIC算法可以用于远距离方位估计;在信噪比相对高时(SNR>10 dB),MUSIC算法和互谱法的方位估计性能相似。 为了验证两种算法性能,于漳河进行了湖试,对采集的数据进行了方位估计,最后得出该MUSIC算法与互谱法有一定的工程应用价值。 [1] 何希盈. 矢量水听器信号处理及关键技术研究[D].武汉: 海军工程大学, 2010. [2] 王永良, 陈辉, 彭应宁, 万群. 空间谱估计理论与算法[M]. 北京: 清华大学出版社, 2004, 83-87. [3] 梁国龙, 张锴, 付进等. 单矢量水听器的高分辨方位估计应用研究[J]. 兵工学报, 2011, (32): 987-990. [4] 尹燕, 毛卫宁. 基于矢量水听器线谱法目标方位估计[J]. 电声基础, 2007, (31): 4-6. [5] 张亮, 田甜. 单矢量水听器基于互谱测向的多目标分辨[J]. 舰船科学技术, 2009, (31): 18-20. [6] 袁志勇, 顾晓东. 单矢量水听器四阶累积量MUSIC算法对信号DOA的估计[J]. 舰船科学技术,2010,32(6): 64-67. [7] 岳剑平, 王德俊, 惠俊英等. 单矢量传感器的互谱估计与方位估计[J]. 哈尔滨工程大学学报, 2004,25(3): 299-304.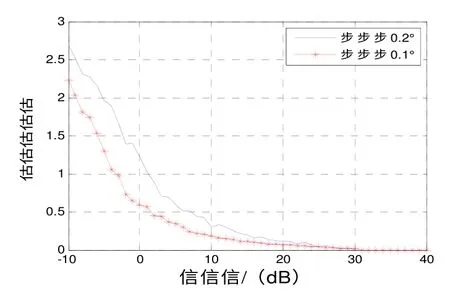

6 湖试数据处理与分析
7 总结
