基于VTS 系统实现的目标近岸行驶跟踪方法研究
2013-06-08林新党
林新党,姚 远
(1.海军驻南京地区雷达系统军事代表室,南京 210003;2.中国船舶重工集团公司第七二四研究所,南京 210003)
0 引言
VTS(Vessel Traffic Services)系统利用AIS 基站、雷达、CCTV、无线电话以及船载终端等通信设施监控航行在港湾和进出港口的船舶,并给这些船舶提供航行中所需的安全信息。
本文提及的VTS 系统主要针对长江水域内的船舶目标进行管理。由于长江航道中目标航行环境复杂,抛锚、起锚、停靠等情况频繁,在上述情况下,在目标航行的路线上存在其他船只目标或者岸线、码头等静物目标,目标回波存在较大的可能性与静物回波融合。在这种情况下,目标在跟踪过程中极有可能与静物目标产生关联,从而导致跟踪失败。
针对目标抛锚、起锚和靠岸行驶的情况,本文提出了通过建立点迹杂波图来指导目标关联的方法,解决目标在这种特殊情况下的跟踪问题,并给出了相关的仿真结果以及在VTS 系统上实际跟踪的效果。
1 点迹杂波图理论
杂波图可以给出雷达覆盖范围内固定杂波的雷达图像。一般来说,雷达图像含有一些相当不规则的由地物杂波、点源和分布杂波构成的区域。当雷达工作于杂波环境时,使用杂波图可以消去雷达点迹中的杂波点,有效地消除杂波点在目标关联、跟踪时带来的干扰。
点迹杂波图的基本理论是把在两次或两次以上相继扫描中的点迹位移与已登记的杂波图点的第一次位置(已测得)为中心的波门相比较。对杂波点或缓慢移动的目标来说,多次扫描中相继进入的回波会保留在波门中,但对于快速目标来说,只有少数几次扫描回波仍保留在波门中。在连续的雷达天线扫描周期中,目标相对于波门中心的移动如图1所示。
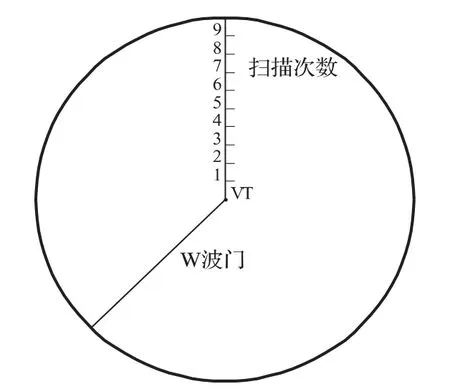
图1 目标相对于波门中心的移动
图1中,V 是目标的速度,T 是雷达扫描周期,W是波门的半径。在确定情况,即无观测误差且检测概率为1的情况下,当扫描次数大于W/VT时,因目标已移出以点迹初始位置为中心的波门外,故关联成功的次数不再增加。因此,在若干次扫描后,运动目标的关联成功计数值是一个与目标速度有关的常数,而固定目标的成功次数却随扫描次数增加而增加。
2 点迹杂波图的建立与维护
利用雷达扫描的前N个周期来建立点迹杂波图。将第一个周期的点迹全部看作杂波点,设置关联波门、扫描次数以及成功门限,后续N-1个周期的点迹到来后与杂波点进行关联,落入杂波点关联区域中的,则对应的杂波点迹成功计数器加1,期间要保证每一个杂波点在一个周期内不会同时与多个点迹成功关联。当到来的点迹没有与已有的杂波点成功关联,则将其作为新的杂波点。当扫描次数等于N时,将关联成功计数器的数值大于成功门限P的点迹看作杂波点。点迹杂波图的建立与维护流程如图2所示。
杂波图建立之后,需要定时对其进行更新维护。当杂波图中出现新的杂波点时,成功计数器被复位,相关波门即以该点迹为中心。计数器记录初始化后的扫描次数。在每次扫描时,如果有一个新点迹落入波门内,则成功计数器增加1。当扫描次数达到判决所要求的扫描次数N时且成功次数大于判决门限时,就认为目标是固定的,用最新的一次点迹的坐标来更新波门中心。在对成功计数器的计数值进行计算时,每个周期内,每一个杂波点成功计数器增加的值小于等于1,即保证每一个杂波点在一个周期内不会同时与多个点迹成功关联。

图2 点迹杂波图的建立与维护流程图
点迹杂波图需要选取适当的固定目标关联波门、扫描次数以及成功门限。本文中,VTS 针对的目标最小运动速度为0.5 m/s,一个雷达扫描周期为3 s,则在一个周期内目标最小的移动位移为1.5 m。考虑到雷达精度带来的检测误差,应该将关联波门取得比较大(26.51*3=79.53 m);考虑到目标在运动时与岸线的距离(≥45m),应该将关联波门取得比较小。受到这两方面的限制,本文中取波门半径45 m,成功门限P=45/1.5=30。考虑到在锚区和远处的固定物体由于受到遮蔽,导致检测概率下降,这里取检测概率为66.7%,故扫描次数N=30/66.7%=45。点迹杂波图45个扫描周期(135 s)更新一次。
3 目标抛锚、起锚和近岸行驶的跟踪流程
当目标正常跟踪时,将目标航迹分为固定航迹、可靠航迹和暂时航迹。固定航迹是指经过点迹杂波图判定为固定地物的点迹形成的航迹。可靠航迹是指运动目标的点迹所形成的航迹。暂时航迹就是正在由点迹杂波图进行判定的航迹,其有可能为固定航迹也可能是可靠航迹。处理顺序是,先固定航迹,再可靠航迹,最后暂时航迹。把点迹与固定航迹适当配对,减少了可能会影响目标航迹的假点迹的数目。由于对可靠航迹给予优先而不是暂时航迹,使得暂时航迹不可能从可靠航迹中关联点迹。
当目标处于抛锚或靠岸状态时,处理顺序是:先固定航迹,再是处于抛锚或靠岸状态的航迹和其余的可靠航迹关联,最后是暂时航迹关联。把点迹与固定航迹适当配对,减少了可能会影响目标航迹的假点迹的数目。让暂时航迹殿后,使其不可能从处于抛锚或靠岸状态的航迹和可靠航迹中关联点迹。
当目标处于起锚状态时,处理顺序是:先固定航迹,再可靠航迹关联,然后暂时航迹关联,最后是处于起锚状态的航迹关联。把点迹与固定航迹适当配对,减少了可能会影响目标航迹的假点迹的数目。目标在起锚时,速度很低,目标状态不稳定,目标点迹由杂波变为目标需要一定时间来区分,让处于起锚状态的航迹殿后是为了防止目标起锚时错误关联,导致起锚跟踪失败。
4 点迹杂波图MATLAB 仿真结果
在MATLAB中仿真点迹杂波图,如图3、4所示。
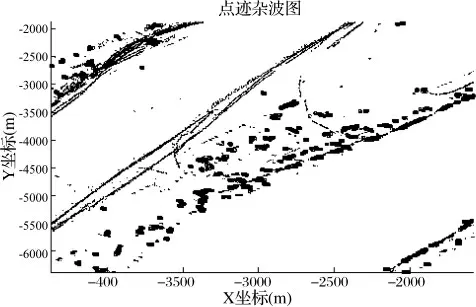
图3 锚区点迹杂波图

图4 航道点迹杂波图
图3 是锚区,图4 是岸边,方框标出的是杂波的点迹,圆点是运动目标的点迹。从仿真结果可以看出,点迹杂波图的建立可以对目标的锚区跟踪和靠岸跟踪起到重要的指导意义。
5 点迹杂波图在VTS 系统中的应用
通过建立点迹杂波图来剔除静物点迹对目标跟踪的影响,已经在VTS 系统上实现,并具有良好的处理效果。图5 用来说明点迹杂波图指导目标靠岸跟踪的过程。

图5 目标靠岸行驶过程
在目标靠岸行驶的过程中,由于距离岸边很近,目标的回波很有可能与岸边静物回波融合,导致检测出的点迹异常。通过建立点迹杂波图,可以筛选出岸边的固定目标,当目标靠岸行驶时,如果关联到的点迹为杂波点,则该周期目标进行外推处理,这样就避免了目标与静物目标点迹或者异常点迹发生错误关联而导致的跟踪失败。
为了达到系统处理时延的要求,这里对点迹杂波图筛选扇区中点迹的处理时间进行了测试,结果如图6所示。
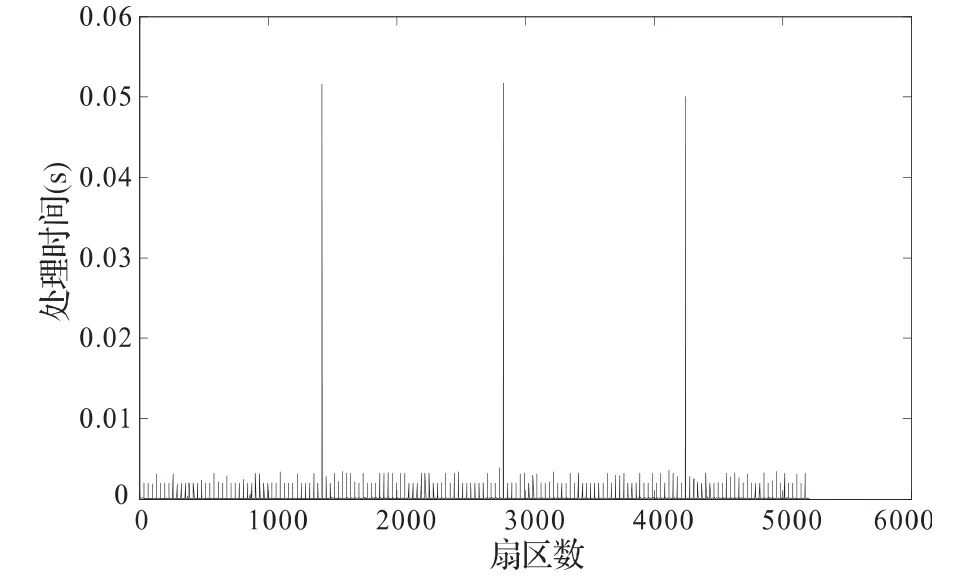
图6 点迹杂波图的处理时间统计
如图6所示,利用点迹杂波图在处理扇区中的点迹时,平均耗时10-3s,点迹杂波图每45个扫描周期(135 s),大约1440个扇区更新一次,每次更新平均耗时5×10-2s。经测试,点迹杂波图的处理时间满足处理时延的要求。
6 结束语
本文针对目标抛锚、起锚和靠岸行驶的情况,提出了通过建立点迹杂波图来指导目标关联的方法,以解决目标在这种特殊情况下的跟踪问题。根据MATLAB仿真,以及VTS 系统实测的结果,该方法能在一定程度上提高目标在抛锚、起锚和靠岸行驶情况下的跟踪性能,同时对类似环境下的跟踪处理给出了相应的解决方案,具有一定的指导意义。
[1]A 费利那,F A 斯塔德.雷达数据处理[M].北京:国防工业出版社,1988.
[2]I SkolnikMerrill.雷达手册[M].北京:电子工业出版社,2003.
[3]何友,修建娟.雷达数据处理及应用[M].北京:电子工业出版社,2009.
