基于功率键合图的万向车液压系统建模与仿真
2013-05-25陈锦耀宋荣利郭爱东
陈锦耀,宋荣利,郭爱东
(1.军事交通学院 军事物流系,天津 300161;2.军事交通学院 基础部,天津 300161)
采用麦克纳姆螺旋滚轮(Mecanum Wheel)的万向移动车辆是当今国际上应用最广的一种万向车辆.鉴于液压驱动系统具有的功率密度大、低速性能好、操控性好等优势,大吨位万向车采用液压驱动已几乎是必然的选择.万向车独特的行走方式也决定了其液压驱动系统的特殊性,因此有必要对此进行深入的理论研究.
1 万向车液压驱动系统原理
研制的某型万向车平台具备在平面任意方向行走的功能,能满足狭窄场地内的多种作业需求.该车行走系统采用麦克纳姆螺旋滚轮驱动技术,4个滚轮镜像布置,独立驱动,通过操纵手柄分别控制4个滚轮的旋转方向和速度,即可驱动车辆在平面任意方向上行驶.国内类似的电动万向车采用4个车轮分别由轮边电机+减速器驱动的方式,其电机控制系统和传动结构都较为复杂,结构尺寸较大,车辆行走的平稳性也不够好.本文研究的万向车平台采用液压泵 马达驱动系统代替电机驱动,从而省去4个轮边减速器,使车体结构更加紧凑,车辆的功力性能和路面适应性也更好.
该系统采用开式回路的节流调速方式,由1个液压泵带动4个定量马达分别驱动4个车轮,由多路电液比例换向阀控制马达的转向和转速,电流信号由控制手柄发出.为提高效率,液压泵采用带负载敏感控制的变量泵,自动根据系统流量需求和负载压力大小调节泵排量.设计的液压系统中变量泵的控制回路和1个液压马达的驱动回路分别如图1和图2所示[1].
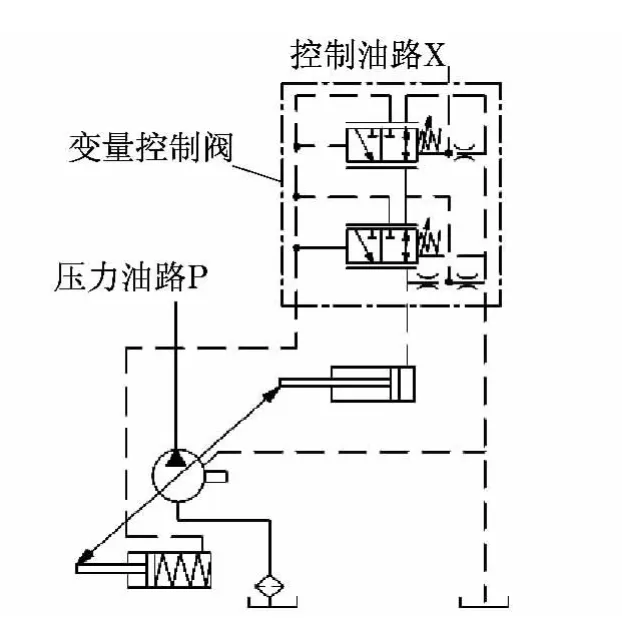
图1 变量泵控制回路Fig.1 Hydraulic pump contrl principle

图2 液压马达驱动回路Fig.2 Hydraulic motor drive principle
该系统具有以下特点:①带负载敏感的液压泵变量控制.泵的变量控制阀会根据系统负载大小以及流量需求大小(即方向控制阀阀口大小),通过变量缸自动调节柱塞泵的斜盘倾角,从而改变排量.流量需求大或负载大时,均会增大排量[2].②采用比例减压阀控制的方向/流量控制.液压马达的控制由采用比例减压阀调节的电液换向阀实现,比例减压阀的输出压力受控制手柄的输出电流调节,该压力在控制换向阀换向的同时,精确调节换向阀阀口开度大小,从而控制马达的输入流量及转速.③保持输出流量恒定的负载压力补偿控制.压力补偿阀能在马达负载变化时自动保持输出流量的恒定.④液压马达带停车制动器.当停车时,制动阀组输出压力小于设定压力,马达制动器蝶形弹簧释放,实现停车制动.
2 建立系统功率键合图模型
功率键合图方法是一种系统动力学建模方法,是用来描述工程系统能量结构的图示表示方法.该方法已在机械、电气、液压和热力学等各类工程技术领域的动态分析与控制研究中得到广泛应用[3].本文对上述万向车液压驱动系统建立了功率键合图模型.由于篇幅所限,图3仅画出了液压泵控制部分和4个马达驱动回路中的1个(即“分流点”右侧部分),用以说明问题.为增强其可读性,对传统的键合图进行了两点改进:①按照系统构成进行了模块划分和相应的标注.②键合图的布局尽可能与液压系统原理图保持一致.

图3 功率键合图模型Fig.3 Power bond graphs model
图3中n0为泵输入转速rmin-1;T0为电机输出转矩,N·m;R1为泵的机械摩擦阻尼,N·m·s;I1为泵旋转部分转动惯量,N·m·s2;Tp为泵输入转矩,N·m;Vp为泵排量,ml·r-1;pp为泵工作压力,Pa;R2为泵内泄漏液阻,N·s·m-5;R3为溢流阀口液阻,N·s·m-5;C1为泵供油管道液容,m5· N-1;Q0为泵实际流量,L·min-1;pL为负载压力,Pa;R4为负载敏感阀液阻(压力油通口),N·s·m-5;R5为负载敏感阀液阻(回油通口),N·s·m-5;pc为变量缸控制压力,Pa;v1为变量缸活塞运动速度,m·s-1;A1为变量缸活塞作用面积,m2;F1为变量弹簧预压缩力,N;Se1为变量弹簧预压缩力,以力源表示;C3为变量弹簧弹性模量,m·N-1;ic为换向阀控制电流,A;R6为换向阀液阻,N·s·m-5;R7为补偿阀液阻,N·s·m-5;C2为马达供油管道液容,m5·N-1;R8为单向阀液阻,N·s·m-5;R9为缓冲阀液阻,N·s·m-5;pm1为马达工作压力,Pa;R10为马达内泄漏液阻,N·s·m-5;Qt为马达理论流量,L·min-1;Vm为马达排量,mL·r-1;R11为马达机械摩擦阻尼,N·m·s;I2为马达旋转部分转动惯量,N·m·s2;Tm1为马达输出转矩,N·m;nm1为马达输出转速,r·min-1;液压泵模块中的可调转换器MTF为其可变排量供油部分,其排量控制信号来自于变量缸的位移量x(图中v1的积分);变量缸模块中的TF为参数为活塞面积A1的固定转换器.马达模块中的TF为参数为排量Vm的固定转换器;负载敏感阀模块中R4和R5分别表示变量缸通压力油和通回油时的液阻(指图1中变量控制阀组的上阀块).当泵工作压力pp与负载压力pL之差大于设定值时,压力油接通变量缸,R4为一有限值,R5无穷大,控制压力pc增大,泵排量减小.当pp与pL之差小于设定值时,回油口接通变量缸,R5为一有限值,R4无穷大,控制压力pc减小,泵排量增大.
负载敏感阀中的压力切断阀(指图1中变量控制阀组的下阀块)仅在泵超压时起保护作用,正常情况下不工作,可不予考虑.类似的情况还有溢流阀液阻R3,正常情况下认为是无穷大.
根据键合图可以方便地写出系统的数学模型.下面给出由负载敏感阀调节的液压泵变量控制部分的主要方程.
电动机1结点:

机液转换MTF环节:

式中:Qpt为泵理论流量.
液压泵0结点:

负载敏感阀1,0结点:

式中:pset为负载敏感阀设定压力.
变量缸1结点:

实际计算时还要添加一些辅助方程,例如可变液阻R4,R5的表达式,泵可变排量Vp的表达式等.根据功率键合图也可以推导出传统的传递函数或状态方程模型,但若无特别需要,也可以不这样做,因为传递函数方程和状态方程在结构形式上的规整性要求可能会带来一些麻烦.实际上,根据键合图中各作用元的数学表达式和各0,1结点的约束关系,直接写出如上的系列模型方程,不仅结构相对简单,并且易于检查错误.
3 建立Simulink仿真模型
液压系统的仿真,尤其是动态仿真,对于验证和优化系统设计具有重要意义.虽然已经出现了多种专门的液压仿真软件,但仍不能完全代替自行手动建模和仿真分析的过程.自行建模虽然过程繁琐,但其最大优势是建模和仿真过程的灵活性和可控性更好,同时,系统设计者在对自己设计的系统进行分析建模的过程中,无疑会加深对系统的理解和认识,往往会发现一些被遗漏的细节问题.因此,手动建模和仿真仍然是液压系统设计者应当具备的重要能力.
MATLAB提供的Simulink软件包可以方便地对液压系统进行动态特性仿真,不仅界面友好且支持更灵活的模型描述手段,既支持方块图模型输入,也支持MATLAB的M文件输入;可以处理线性和非线性系统,离散、连续和混合系统.Simulink是一款非常好的通用仿真软件[4].
在Simulink模型窗口中很容易依据这些数学方程建立仿真模型,考虑到所建立仿真模型的复杂性,为使模型简捷、层次清晰,便于分析研究,可以通过封装的方法创建模块化的仿真模型.所谓封装就是创建子系统的自定义用户接口,就是把具有一定功能的子系统封装成一个模块.该模块可以隐藏原子系统的内容,使其作为一个整体显示在用户模型中.自定义模块与Simulink中的固有模块一样有自己的图标和参数对话框.
将液压泵、控制阀、马达等分别封装成子系统,然后再将各子系统组成一个整体,如图4所示.

图4 系统仿真模型框图Fig.4 System simulation model block diagram
4 动态特性仿真
利用功率键合图及其导出的仿真模型,在Simulink环境中可对感兴趣的不同动态过程进行模拟仿真.对于上述系统,最重要的是两个方面的问题,一是车辆行驶速度变化对系统动态响应的影响,二是负载变化对系统动态响应的影响.
带负载敏感的液压泵变量控制系统在执行元件速度变化时动态响应特性是一个值得深入研究的重要问题[5].万向车行驶速度的改变是由控制手柄发出不同的电流信号,改变比例换向阀的开度大小来实现的.图5所示为在负载敏感阀控制下不同换向阀开度时泵出口压力变化曲线.比例换向阀的不同输入信号为S=-4,-8,-12mA.从曲线可以看出,当换向阀开度信号为-4mA时,负载敏感系统出现不稳定现象;而收敛最快的是开度信号为-8mA时的工况.对于这类情况,系统设计者要做的是在进一步细化仿真模型的基础上,对相关的系统参数进行修改后,反复进行仿真实验,找出影响系统稳定性的症结,用以指导系统优化.这也是数字仿真的意义所在.
5 结论
(1)功率键合图方法作为一种行之有效的动力系统数学建模方法,易于全面保留和反映系统的各种线性和非线性因素,模型的结构性和层次性较为清晰,再辅以Simulink软件强大的运算能力,能很好地应用于液压系统的动态特性仿真.仿真的效率和灵活性较高.文中对键合图的模块化改进,提高了键合图的可读性和和可移植性,是一种值得推广的好方法.

图5 不同换向阀开度时泵出口压力变化曲线Fig.5 Pump outlet press curve in different inlet of chang valve
(2)带负载敏感控制的变量泵,加上带压力补偿功能的电液比例方向阀马达驱动系统,能较好地实现万向车的行走驱动功能.但分析和仿真研究的结果同时表明,变量泵的负载敏感控制系统在某些工况下可能出现不稳定的情况,是将来进行进一步数字仿真、试验测试和系统优化的重点方向.
[1]陈锦耀,苏欣平,郭爱东,等.万向叉车行走驱动液压系统设计[J].中国工程机械学报,2012,10(2):197-200.CHEN Jinyao,SU Xinping,GUO Aidong,et al.Design for hydraulic running system of universal forklift truck[J].Chinese Journal of Construction Machinery,2012,10(2):197-200.
[2]郝鹏,何清华,张大庆.负载敏感系统测试及特性分析[J].中国工程机械学报,2006,4(3):317-321.HAO Peng,HE Qinghua,ZHANG Daqing.Testing and characteristic analysis of load-sensing system [J].Chinese Journal of Construction Machinery,2006,4(3):317-321.
[3]KARNOPP D C,MARGOLIS D L,ROSENBERG R C.System dynamics:modeling and simulation of mechatronic systems[M].New York:Wiley,2000.
[4]薛定宇,陈阳泉.基于MATABLE/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2011.XUE Dingyu,CHEN Yangquan.Technology and application of system simulation based on MATABLE/Simulink[M].Beijing:Tsinghua University Press,2011.
[5]田树军,胡全义,张宏.液压系统动态特性数字仿真[M].大连:大连理工大学出版社,2012.TIAN Shujun,HU Quanyi,ZHANG Hong.Dynamic simulation of hydraulic systems[M].Dalian:Dalian University of Technology Press,2012.
