履带式湿地系列推土机行走机构的仿真
2013-05-25徐晓龙韩毓文张耀娟
成 凯,徐晓龙,韩毓文,张耀娟,郑 森
(1.吉林大学 机械科学与工程学院,吉林 长春 130025;2.河北钢铁集团宣工公司,河北 宣化 075100)
履带推土机作为铲土运输机械,在建筑、筑路、采矿、水利、农业、林业及国防建设等土石方工程中被广泛应用.近年来,随着沿海地区的陆续开发,特别是渤海湾经济区开发力度的加快,中国市场对低比压推土机的需求稳步上升.国外常依据推土机所适应的作业条件称为湿地推土机,并根据作业地面的松软程度分为湿地、超湿地、超超湿地推土机以及泥上机械等.
在沼泽地和湖区水网地区,土壤的含水量较高甚至达到饱和状态,轮式推土机不能作业,或者在作业的时候形成较深的轮辙,对土壤结构的破坏严重.履带式推土机对土壤的单位面积压力小,对土壤的附着性能好,在含水量高或者松软如沼泽地、低洼地、河岸海滩、水田等恶劣的地面条件下仍能正常作业,由于履带车辆自身以及使用环境的复杂性,传统的研究模式导致研制费用高,研究周期长.地面力学以及多体动力学的发展和完善为履带车辆的建模仿真提供了理论与技术支持.本文采用著名的多体动力学仿真分析软件RecurDyn对某履带式湿地推土机行走系统进行分析.RecurDyn是基于递归算法的多体系统仿真软件,采用相对坐标系运动方程理论[1],求解速度快.RecurDyn中附有的履带车辆子系统Track(LM),可以实现履带系统的三维建模,分析不同类型的履带系统以及与土壤的相互作用,是进行履带车辆复杂动力学系统分析的有力工具.
本文在RecurDyn中对履带式湿地推土机行走系统在沼泽地路面下的推土作业循环工况进行仿真分析,结合某企业的项目改变了行走机构的参数,进一步开发更小接地比压的湿地系列推土机,对两种接地比压的湿地系列推土机的行走系统的受力进行了详细的研究,为履带式湿地推土机行走系统性能的改进提供参考.
RecurDyn软件提供的低速履带系统工具包Track/LM包括各种履带系统组件,如驱动轮、引导轮、负重轮和履带等.其中履带板的形状是可以根据用户自己的需要进行修改的,使用这些组件可以实现对车辆行走部分的精确建模.湿地推土机的履带板的断面有三角形和圆弧形等.优点是可以减少履带黏泥,避免地表泥土搅拌,使地面免于损坏.三角形履带板还有排水和压实作用,能提高土壤的承载能力.同时RecurDyn软件提供了Ground模块,用于建立各种标准地面,也可以自定义符合实际路况的路面.
1 履带式湿地推土机模型的建立
履带式推土整车模型分为四个部分:车体模型、平衡梁、行走系统模型和推土工作装置模型.本文中,车体模型、平衡梁及推土工作装置模型是预先应用PROE软件进行建模,另存为IGES格式,然后再由RecurDyn软件导入IGES格式的车体模型和推土工作装置模型.对于车体模型,本文在RecurDyn中手动添加车体的质量和转动惯量属性.对于推土工作装置模型,按实际情况添加正确的约束关系,仿真过程中不考虑工作装置的动作的影响,故对油缸行程驱动设置为零.行走系统模型应用RecurDyn履带车辆子系统Track(LM),建立履带系统模型,创建的某履带推土机三维动力学模型,如图1所示.
在RecurDyn中建立的履带行走系统模型含有左右2条履带子系统.每条履带系统由1个驱动轮、1个引导轮、7个负重轮、2个托链轮和41块履带板组成.履带推土机行走系统驱动轮后置;履带系统中的负重轮、驱动轮和托链轮通过转动副连接于车体的固定位置;引导轮以移动副连接于车体,并在其轮心和车体之间安装弹簧,平横梁和推土机车体之间添加转动副,平衡梁和行走架之间安装弹簧.两种接地比压的履带式湿地推土机的履带轨矩不同,履带板的长度也不同.其中接地比压为0.032MPa的推土机的履带中心距B=2.110m,履带板宽度b=0.930 m,接地比压为0.028MPa的推土机的履带中心距B=2.230m,履带板的宽度为b=1.070m,建立的履带行走系统三维模型如图2所示.

图1 某履带式湿地推土机三维动力学模型Fig.1 Caterpillar wetland bulldozers threedimensional dynamic model

图2 履带式湿地推土机行走系统三维模型Fig.2 Crawler system for three dimensional model
2 地面-车辆力学关系以及路面模型的建立
RecurDyn中路面由矩形单元构成,每块单元可以记住最大沉陷量、最大压力、剪应变和剪应力,以计算正压力或水平摩擦力.对于不同类型的地面,车辆的履带与地面之间力的计算有所不同.软性地面模型认为土壤具有记忆功能,即考虑加载历史.每一履带板与地面之间都有一个广义力,并由一用户子程序完成该广义力的计算.履带车辆对地面的正压力是文献[2]提出的压力-沉陷关系式,即

式中:p为接地压力,kPa;kφ为内摩擦的土壤变形模量,kN·m1.3;kc为内聚的土壤变形模量,kN·m0.3;b为履带板的宽度,m;Z为变形深度,m;n为变形指数.
式(1)适用于持续加载过程.对于卸载过程,计算公式为

式中:k0,Au为土壤的特征参数.
履带与地面水平力的计算也是基于文献[2],履带在接触的地面上产生剪切作用,剪切力-位移的关系为

式中:τmax为最大剪切应力,Pa;Sj为剪切位移,m;i为水平剪切变形模数,m;且有

式中:c为土壤的内聚力,N;p为地面压力,Pa;φ为土壤内摩擦角,(°).
根据实际作业情况,本文沼泽地面选择的是含水量为55%的黏土[3],参数如表1所示.

表1 黏土路面参数表Tab.1 Parameter of ground stiffness of clay pavement
3 仿真分析
履带推土机是一个复杂的非线性多体系统.履带板与地面的挤压过程属于典型的接触过程,应用RecurDyn软件能求解此类大规模及复杂接触的多体动力学问题.对两种接地比压的履带式湿地推土机的行走系统在相同含水量的路面条件下进行仿真分析.在仿真分析之前建立系统坐标系,沿车行走方向为纵向,即-x方向,垂直于地面的方向为竖直方向即y方向,z方向为垂直车体方向,符合右手定则.履带式湿地系列推土机按车重分别为17 500,17 800kg,仿真时间为40s,仿真步数为800步.设置运动仿真参数,并进行沼泽地路面上的运动仿真分析,取推土机最常见的工作状态,直线推土作业循环和恶劣工况满载转向工况,来分析关键部件的受力情况.图3为履带式湿地系列推土机在沼泽地路面上的仿真示意图.

图3 履带式湿地推土机在沼泽地路面上的仿真示意图Fig.3 Simulation of the crawler wetland bulldozers in the swamp road
3.1 基本型和湿地型推土机的负重轮受力对比分析
推土机在直线推土作业过程中,各个负重轮的垂向受力是不同的,以负重轮7的受力图为例说明一下该系列推土机的基本型和湿地型推土机的负重轮受力情况的特点及不同之处.通过图4可以看出负重轮在不同运动阶段的受力情况是不同的.0~3s推土机落至虚拟地面上,负重轮的受力有很大的波动,这个过程在现实中不存在,可以忽略.刚开始切土的时候[4],由于切土比较浅,作用在推土铲上的力是方向向上的,所以负重轮垂向力有减小的趋势.之后随着切土深度和推土板前土堆的增加,作用在推土铲上垂向的力逐渐增加,所以负重轮上的受力有逐渐增大的趋势.在运土过程中负重轮的垂向受力基本保持稳定.从图4中还可以发现湿地型推土机负重轮的垂向受力要比基本型的推土机的负重轮的垂向受力要小,大约受力减小20%左右.这是因为湿地型推土机的使用环境是下陷量大的沼泽地路面,由于行走系统在沼泽地面的下陷使得驱动轮也接触到泥泞路面,参与了推土机垂向受力的分配,所以湿地型推土机的负重轮受力情况会变好.但是若负重轮受力过小,则履带容易脱落,因此在沼泽路面上使用时,应当给履带施以更大一些张紧力.
3.2 直线推土作业循环工况驱动轮转矩分析
从图5可以看出在沼泽地面条件下,湿地推土机和超湿地推土机在直线推土作业循环时,随着总阻力的增大,驱动轮的驱动转矩也随之增大.湿地型推土机的最大驱动转矩为30.444kN·m,超湿地型推土机的最大驱动转矩为42.937kN·m,驱动轮转矩增大了41%,但仍小于发动机与变矩器共同输出的最大扭矩.最大驱动扭矩增大的主要原因是超湿地推土机的行走系统的履带板在加长和终传动的部件加长以后整机的质量增大导致履带和地面的滚动阻力增大.驱动轮的力矩除了克服作业阻力、履带沿着路面的滚动阻力外、还有就是克服台车架各个运动零件和履带本身的内摩擦.由于履带板加宽以后.链轨节消耗的摩擦功也增大,所以这也是超湿地推土机所需驱动转矩增大的一个因素.因此在开发更小接地比压的推土机的时候要注意发动机与变矩器的共同输出能否满足推土机所需要的最大驱动转矩[5].

图4 推土机负重轮7垂向受力曲线Fig.4 Road wheel seven vertical stress curve

图5 推土机驱动轮转矩曲线图Fig.5 Bulldozer driven rotary torque curve
3.3 相同土壤特性情况下不同接地比压推土机的履带板的受力对比分析
图6是湿地系列推土机在含水量为55%的沼泽地面条件下,以1挡速度推土作业时的履带销轴受力曲线.取初始位置在驱动轮的松边履带上的履带销轴进行研究分析.推土机落地后,履带松边的振荡引起履带的销轴受力出现较大的波动,推土机在加速前进时,该履带处于松边的位置上,销轴受力变化不大,当履带节绕至第一个负重轮下方位置,此后该履带销受力缓慢增大,该值为履带驱动段拉力即为驱动链轮的输出牵引力.
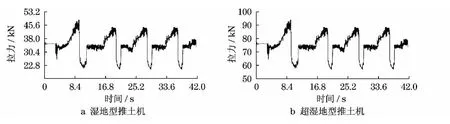
图6 履带板销轴拉力曲线Fig.6 Segments pin tension curves
从其受力曲线可以看到,湿地系列推土机在沼泽地面进行推土作业循环时,履带板销轴的受力是呈周期性变化的[6].超湿地推土机履带销轴受力一直比较大,而且当该履带板绕卷至驱动段的时候超湿地推土机的履带销轴受力的最大值为湿地推土机履带销轴受力的大约2倍.说明当履带板加宽以后履带的销轴受力更大,更加恶劣.所以建议履带板及销轴的强度应该增加.因为履带板加宽以后受力情况变恶劣,所以在减小接地比压的时候,不能靠一味地加宽履带板来增大接地面积,从而达到降低接地比压的效果[6].
3.4 湿地型推土机斜支撑的仿真分析以及有限元分析
推土机的导向装置是由台车架、摆动轴和斜撑臂组成的,主要起到承重、传递作用力和保证车辆转向时其行走装置不发生横向偏歪的作用.所以斜支撑在推土机转向时的受力情况很恶劣,以湿地型推土机为例分析斜支撑在推土机转向时的受力情况.从图7中可以看出在直线行驶过程中,斜支撑和半轴的连接处受到的横向力基本为零,而在转向过程中受到很大的横向力的作用.
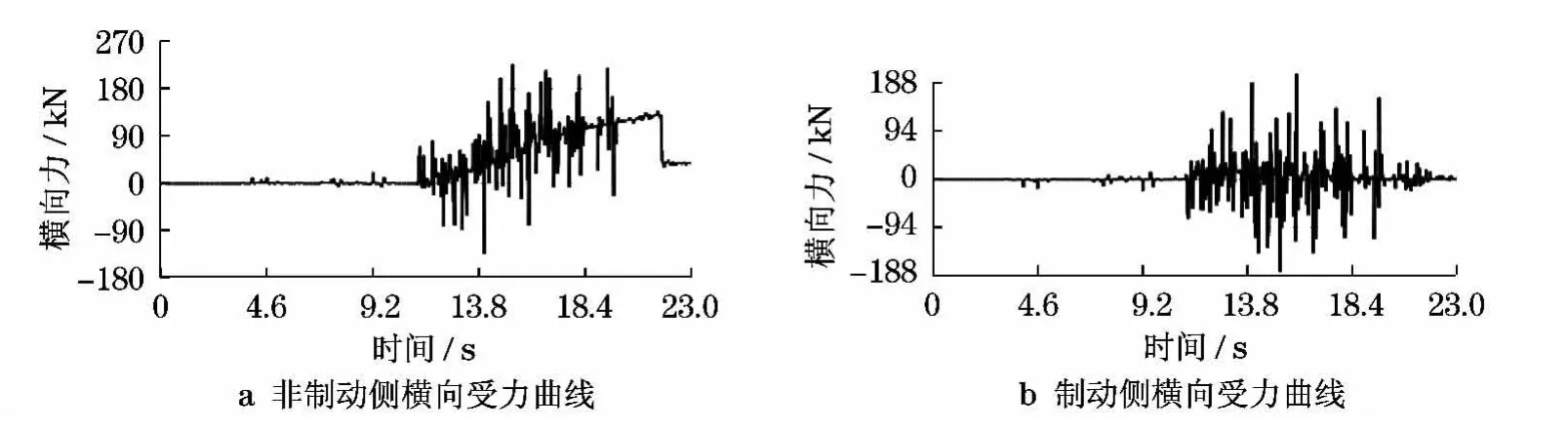
图7 湿地型推土机斜支撑和半轴连接处的受力曲线图Fig.7 Wetland bulldozer oblique support and axle-connection at the graph of the force
满载转向的时候斜支撑与半轴接触处受到的横向力波动很大,非制动侧的受力要大于制动侧受力,非制动侧受力最大值为228.761kN,制动侧受力最大值为206.371kN,所以经常满载转向的推土机斜支撑处受力很恶劣.
推土铲满铲推土,施加载荷为均布载荷,并考虑冲击对整车的影响,冲击载荷约4倍自重,在此情况下对斜支撑进行ANSYS分析,得到的斜支撑的应力云图和位移云图如图8所示.

图8 湿地型推土机满载转向工况斜支撑Von Mises应力和位移云图Fig.8 Wetland bulldozer loaded steering conditions oblique support VonMises stress and displacement cloud
根据图8可以看出,履带推土机斜支撑在上述危险工况下的最大应力为110.0440MPa,发生在根部红色区域,但低于许用应力,满足强度要求,斜支撑最危险的部位即为图中深色危险区域,这与斜支撑在现实使用过程中曾出现的断裂部位是相符的.看斜支撑位移云图发现斜支撑的最大位移变形位置发生在斜支撑和半轴的连接处.根据实际使用过程中斜支撑发生断裂破坏情况,建议在铸造时,要保证铸造工艺,斜支撑铸造的壁厚要均匀过渡,尽量避免斜支撑在铸造时,上模壁厚出现缩松、缩孔或夹层.在铸造时,可采取顺序凝固,使得远离冒口的部位先凝固,然后靠近冒口的部位凝固,最后冒口凝固.并且要保证形成远离冒口到冒口之间递增的温度梯.
4 结论
本文利用多体动力学仿真软件RecurDyn对履带湿地系列推土机进行了仿真分析,分析了基本型推土机和湿地型推土机的负重轮在不同使用环境下的受力情况,同时对不同接地比压的湿地系列推土机的驱动轮和履带板以及斜支撑的受力情况进行了分析,得到如下结论:
(1)基本型推土机的负重轮的受力要比在沼泽地路面条件下使用的湿地型推土机的负重轮受力要大20%左右.这是因为湿地型推土机在沼泽地环境下下陷量大,使得行走系统的驱动轮也接触地面,承担一部分,所以湿地型推土机的负重轮的受力要小.因此在沼泽地路面上使用时,应给履带施以较大的张紧力,以防止履带脱落.
(2)为了降低湿地推土机的接地比压,将履带板加长了以后,驱动轮的转矩增大了41%,但是仍小于发动机与液力变矩器共同输出的最大转矩.因为在要获得更小接地比压的湿地推土机的时候要综合考虑发动机及转向阻力等因素.
(3)履带板加长以后,履带销轴的受力增大,因此设计的时候应该增大板销的刚度和强度,要防止履带板销的变形或者断裂.
(4)仿真分析发现推土机的斜支撑在满载转向工况下横向受力很大,进行有限元分析发现的最危险的位置发生在根部位置,因此建议要尽量禁止满载转向,同时建议在铸造时,要保证铸造工艺,斜支撑铸造的壁厚要均匀过渡,尽量避免斜支撑在铸造时上模壁厚出现缩松、缩孔或夹层.
以上的仿真结果为履带湿地系列推土机的结构设计和优化提供参考,同时展现了多体动力学仿真分析软件RecurDyn能够对履带湿地系列推土机行走系统作全方位、高效率的动力学仿真分析,是履带系列推土机设计与优化的理想工具.
[1]焦晓娟,张湝渭,彭斌彬.RecurDyn多体系统优化仿真技术[M].北京:清华大学出版社,2010.JIAO Xiaojuan,ZHANG Jiewei,PENG Binbin.RecurDyn multibody system simulation optimization technology[M].Beijing:Tsinghua University Press,2010.
[2]BEKKER MG.地面车辆系统导论[M].北京:机械工业出版社,1987.BEKKER M G.Ground-vehicle system introduction [M].Beijing:China Machine Press,1978.
[3]WONG J Y,CHIANG C F.A general theory for skid steering of tracked vehicles of firm ground[J].Journal of Automobile Engineering,2001,215:52-57.
[4]杨晋生.铲土运输机械设计[M].北京:机械工业出版社,1981.YANG Jinsheng.Shoveling transport machinery design[M].Beijing:China Machine Press,1981.
[5]诸文农.履带推土机机构与设计[M].北京:机械工业出版社,1985.ZHU Wennong.Crawler bulldozer institutions and design[M].Beijing:China Machine Press,1985.
[6]张克健.车辆地面力学[M].北京:国防工业出版社,2002.ZHANG Kejian.Vehicle-terramechanics[M].Beijing:National Defence Industry Press,2002.
