基于PIC单片机的自动门驱动器硬件设计
2013-05-17朱彩红张宏涛
朱彩红,张宏涛
(苏州市职业大学 电子信息工程学院,江苏 苏州 215104)
自动门的主要驱动部件——无刷直流电机,具有交流异步电动机简单、可靠、寿命长、便于维护等优点和有刷直流电动机调速性好[1]、效率高、起动力矩大、过载能力强[2-3],其控制与驱动可以采用集成芯片配以一定外围电路实现,本文以PIC16F77作为控制器,加功率驱动单元组成的无刷直流电动机数字控制系统,具有精度高、控制灵活以及可以软件实现换向逻辑和相关先进算法等优点,使自动门开门快速与平稳、关闭过程中无撞击(零速停车)及低噪声,从而保证了自动门运行起动的可靠性.本文主要围绕基于数字控制器的无刷直流电动机功率驱动器硬件的设计,包括主控芯片、电源、霍尔位置传感器电路、驱动电路芯片等.
1 驱动器硬件结构
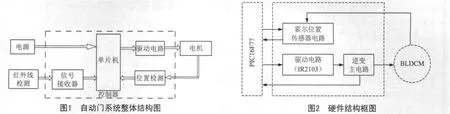
自动门驱动器采用美国Microchip公司生产的PIC16F77电机作为主控芯片,采用IR公司生产的IR2103作为逆变器开关管前级驱动芯片,在设计过程中,力求使用较少的芯片,实现更多的功能.自动门系统整体结构如图1所示,功率驱动器硬件结构框图如图2所示.
1.1 PIC主控芯片
PIC16F77是针对电机控制领域开发的专用芯片,最高工作频率可达到20 MHz,如图3所示.
PIC16F77在控制无刷直流电机时各个引脚的功能为RC2&RD2、RC2&RD3、RC2&RD4、RD5、RD6、RD7(其中RC2为PWM引脚)输出连接到3对MOSFET的驱动器,最终连接到6个MOSFET.这些MOSFET以三相桥式接法连接到三相BLDC电机绕组.3个霍尔位置传感器输出信号分别连接RB4、RB5、RB6引脚,若这3个引脚中的任何一个发生了电平变化,芯片就会产生中断,改变驱动电路MOSFET的通断.
OSC1、OSC2连接系统的4 M晶振,为控制系统提供时钟频率.PIC16F77系列芯片本身具备了2个定时器提供上电时必需的延时.一个是振荡器起振定时器(OST),用来使芯片保持复位,直到晶体振荡器稳定为止;另一个是上电延时定时器(PWRT),仅在上电时提供延时,用来在电源稳定过程中使器件保持在复位状态.有了这2个片内定时器,芯片不再需要外部复位电路.
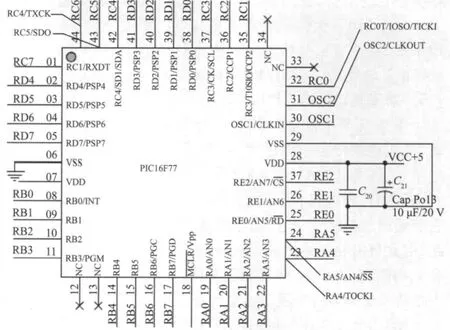
图3 PIC16F77控制BLDCM时的引脚功能图
1.2 电源设计
驱动电路的供电电压为24 V,控制电路的供电电压分为15 V、5 V电压等级.PIC16F77和光耦是5 V电源供电,驱动芯片IR2103为15 V电源供电.15 V和5 V电压可以采用三端稳压控制芯片7815、7805来获得,其电路如图4所示.
1.3 PWM波形产生
PWM信号用来控制功率器件的导通与截止,从而改变加在电动机绕组上的平均电压[4],达到控制电机转速的目的.PIC16F77的RC2为PWM输出引脚,如图3所示.通过使用6个开关MOSFET,可以将三相绕组驱动为高电平、低电平或根本不通电.
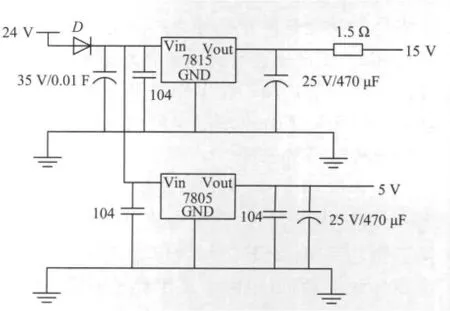
图4 控制供申申路
PWM信号由PIC16F77的CCP模块提供,PWM产生流程如图5所示.PWM信号产生时,Timer2时基寄存器从0开始递增,每隔一个由用户定义的时间间隔进行一次递增计数,该时间间隔最短可以为Tcr.通过选择一个值并将它装入PR2寄存器,可以决定所需的PWM周期.每个Tcr中,TMR2和PR2作一次比较.当两者匹配时,开始一个新的周期.控制占空比的方法与此类似,只需在CCPRxL寄存器中装入一个值即可.与周期比较不同,每隔Tcr/2就将CCPRxL寄存器中的值与TMR2进行一次比较(即比较的频率是周期比较的2倍).如果CCPRxL的值与TMR2的值相匹配,那么对应的占空比输出引脚就会根据选定的PWM模式驱动为低电平或高电平.
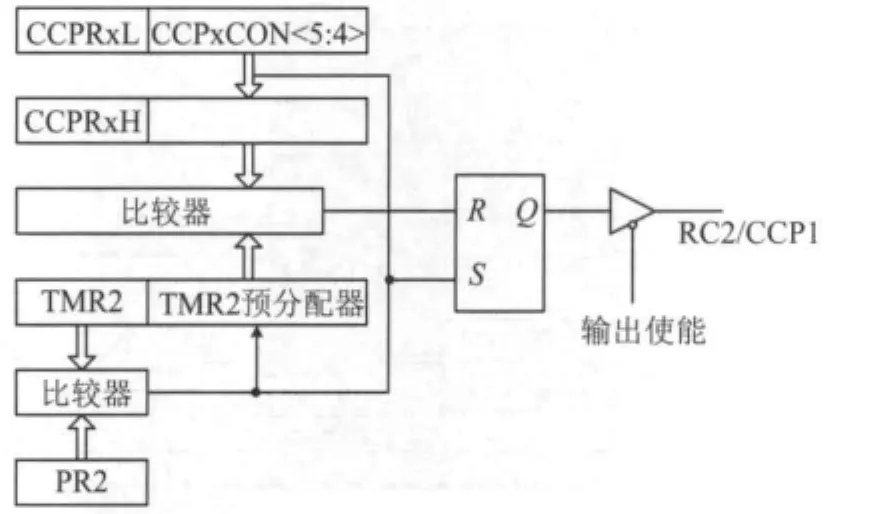
图5 PWM产生流程图
1.4 霍尔位置传感器电路
霍尔传感器的输出信号经过光电隔离输入控制芯片(RB4、RB5、RB6引脚),输出信号电平的改变会触发中断服务子程序,确定转子任意时刻的实际位置.本系统控制的电机,三路霍尔信号输出间隔为120°,每周期导通180°.为彻底隔离电机高电压系统,减少噪声干扰,在位置信号接入之前先进行光电隔离.本设计将霍尔信号反向,采用74hc14d芯片实现,如图6所示.
1.5 功率驱动电路芯片IR2103
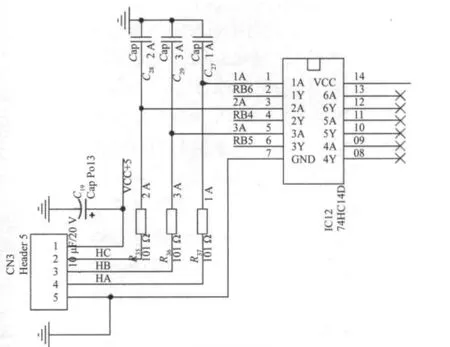
图6 霍尔位置传感器申路
本系统采用脉宽调制技术(PWM)方波电流驱动.开关电路中电源电压为24 V,采用三相桥式逆变电路,工作方式为120°导通型星形三相六状态.根据所选取的控制电机,驱动电路功率芯片选用IR2103,它能输出二路驱动信号,由于内部设有自举式悬浮电路,因此只需要一路电源,使系统设计大大简化.它兼有光耦隔离(体积小)和电磁隔离(速度快)的优点,是中小功率变换装置中驱动器件的首选品种.
图7为驱动电路连接图,图中C2为自举电容,VCC经D1给C1充电,以确保V4关闭、V1导通时,V1管的栅极靠V4上足够的储能来驱动.对于自举电容的选择,一般用1个大电容和1个小电容并联使用,在频率为20 kΩ左右的工作状态下,选用1 μF和0.1 μF电容并联.并联高频小电容用来吸收高频毛刺干扰电压.电路中D1的功能是防止V1导通时高电压串入VCC端损坏该芯片.
IR2103的开通与关断传输延迟时间基本匹配,开通传输延迟时间比关断传输延迟时间长25 ns,这保证了功率管V1和V4在工作时不会发生同时导通,从而避免了直通故障的发生.为了更加安全,电路中,功率管的栅极上分别串联电阻R1、R2以及二极管D2、D3栅极保护电路.
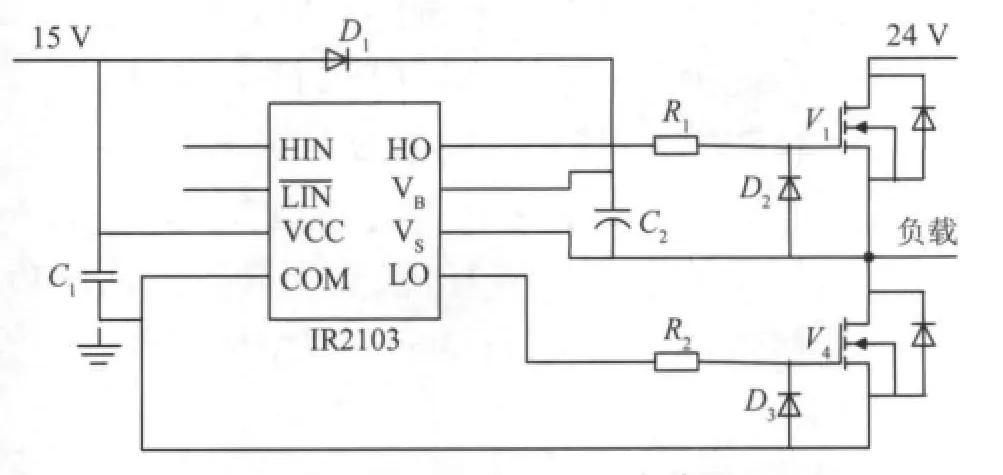
图7 IR2103驱动MOSFET申路图
1.6 MOSFET的选择
主电路的6个MOSFET选用ST公司的STB75NF75,是经过特殊设计的功率器件,额定电压75 V,额定电流75 A,结电阻13 mΩ,具有极高的开关频率,是N沟道型功率MOSFET.场效应管在开关过程中会产生浪涌电压,这些浪涌电压会损坏元件,所以电路中采用稳压二极管钳位浪涌电压,STB75NF75跟场效应管集成并联了一个稳压二极管,内部结构如图8所示.
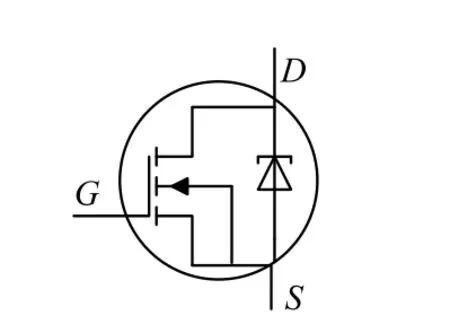
图8 STB75NF75内部原理图
2 试验结果
功率驱动器硬件结构实物如图9所示.
试验样机采用一台额定电压24 V,额定转速3 600 r/min,额定功率50 W的无刷直流电动机,电机运转后测得A相绕组试验波形见图10和图11.从图10可看出,电机相电压为14 V左右,换相时间为5.6 ms左右,根据电机额定参数计算相电压为13.9 V,换相时间为5.56 ms,可见换相时间比较准确,且试验波形接近理论梯形波,电机运行平稳、可靠.
图9 驱动器实物图
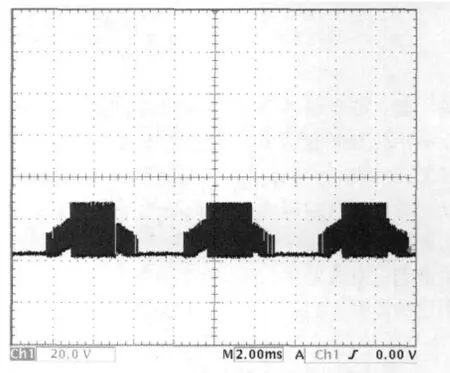
图11 A相绕组的端申压波形(占空比不为1)
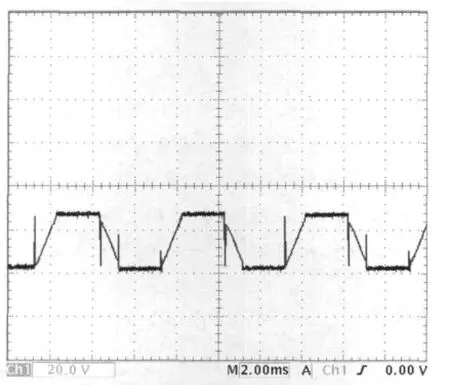
图10 A相绕组的端申压波形(占空比为1)
3 结论
本文介绍了一种基于PIC控制芯片的自动门驱动器硬件设计,试验结果表明,该功率驱动器运行可靠、平稳.配上不同的微控制器及其软件,可以作为伺服驱动器,驱动无刷直流电动机、永磁同步电动机、三相异步电动机等进一步改进设计.
[1]张琛. 无刷直流电动机原理及应用[M]. 北京:机械工业出版社,2006.
[2]叶金虎. 现代永磁无刷直流电动机的原理和设计[M]. 北京:科学出版社,2007.
[3]张宏涛,刘国海,田翔,等. 自动门用永磁无刷直流电动机的设计[J]. 电机与控制应用,2009,36(7):1-4.
[4]娄柯. 基于ARM的无位置传感器无刷直流电机控制器设计[J]. 电气开关,2010(4):29-30.
[5]刘国海,周文娟,张宏涛,等. 一种自动门用无刷直流电机优化设计[J]. 微电机,2009(9):5-8.
[6]焦丽娟,陈仁文,张红. 自动门用无刷直流电机的控制系统研究[J]. 科学技术与工程,2011,35:8 736-8 740.
[7]朱彩红,黄辉,崔婷. 基于Ansoft的自动门用永磁直流电机的设计与分析[J]. 南通职业大学学报,2012,26(4):102-106.
