多功能教学用机器人的设计与实现
2013-05-16陈义平袁明明
陈义平, 时 颖, 袁明明
(黑龙江科技学院电气与信息工程学院,黑龙江哈尔滨 150027)
0 引言
单片机是电子信息类及控制类专业开设的一门重要课程,普遍采用的辅助教学的实验方式是利用单片机开发板、实验箱或软件仿真等形式[1-5],但这几种方式趣味性不强,不利于激发学生的学习热情,影响了学习效果。因此结合教学实际,开发了一种机器人形式的辅助教学装置,该装置以STC89C516单片机为控制核心,采用了多单片独立控制方式,软硬件均可根据需要进行剪裁。而且该装置上搭载的传感器及通信和控制方式均是各种电子设计竞赛中常常会用到的,使学生会认识到该辅助教学装置提供的练习,有利于日后参加电子竞赛等科技活动,进一步激发学习兴趣。
1 总体方案
采用大谷机器人公司生产的路虎5履带式移动平台,该移动平台装有4个280直流减速电机,电机的工作电压为7.2 V,运转电流为160~180 mA,堵转电流约为500 mA,并且每个电机安装了抑制电机干扰的电感。电机经过三级齿轮减速后输出,减速比为1∶64。该平台装有4个特制的编码器。普通编码器是3根线,电源线、地线和信号输出线,这种特制的编码器比普通的编码器多了一条信号输出线,通过对2根信号线的输出信号的处理,不仅能得到转速信息,还可以判断出旋转的方向。
机械手包括3个部分:夹持器、舵机、金属架。为满足设计要求,该机械手使用了3个舵机,第一个舵机控制夹持器的张开和闭合,第二个舵机控制机械手的抬高和降低,第三个舵机控制机械手的旋转。夹持器与舵机直接相连,舵机通过金属架固定在移动平台上。
电路部分采用多单片机独立控制方式,软硬件均可根据需要进行剪裁[6]。机器人总体功能图见图1。

图1 机器人的总体功能框图
2 机器人的主要功能实现
2.1 语音识别与播报功能
模块的主要功能是识别控制者发出的语音指令,发出相应的控制信号。根据设计需求,采用凌阳公司的61A板来完成此功能。SPCE061A是凌阳科技研发生产的性价比很高的一款16 bit单片机,它具有丰富的硬件资源,并集成了ICE(在线仿真电路)接口,可以直接利用该接口对芯片进行下载、仿真、调试等操作。61 A板除了具备单片机最小系统电路外,还包括电源电路、音频电路、复位电路等,采用电池供电。61 A板上有调试器接口以及下载线接口,分别可接凌阳科技的在线调试器、简易下载线,配合在线仿真电路,可方便地在板上实现程序的下载、在线仿真调试[7]。
采用ISD4004芯片实现语音播报,工作电压3 V,单片录放时间8~16 min,音质好,适用于移动电话及其他便携式电子产品中。芯片采用CMOS技术,内含振荡器、防混淆滤波器、平滑滤波器、音频放大器、自动静噪及高密度多电平闪烁存贮阵列。操作命令可通过串行通信接口送入。芯片采用多电平直接模拟量存储技术,每个采样值直接存贮在片内闪烁存贮器中,因此能够非常真实、自然地再现语音、音乐、音调和效果声,避免了一般固体录音电路因量化和压缩造成的量化噪声和“金属声”。采样频率可为 4.0、5.3、6.4 或 8.0 kHz,频率越低,录放时间越长,而音质则有所下降,片内信息存于闪烁存贮器中,可在断电情况下保存100年(典型值),反复录音10 万次[8]。
2.2 GPS 定位功能
GPS的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。而用户到卫星的距离则通过纪录卫星信号传播到用户所经历的时间,再将其乘以光速得到。设计中GPS定位功能的作用是通过接收卫星信号,来确定机器人当前所处的位置,该位置通过经度、纬度和海拔来描述。根据设计的要求,采用HOLUX公司的GPS模块来完成相应的功能。该模块结构紧凑,只需用单片机来接收GPS模块发出信息,进行解析就可得到位置坐标。
2.3 短信收发功能
收发短信功能模块的作用是接收控制者发来的短信,将短信内容传递给控制单元,以便教学机器人根据短信内容完成相应的操作,在完成操作后,再通过该功能模块将反馈信息发送给控制者。这里采用TC35模块来完成此功能。TC35是西门子公司的1个便捷的即插即用解决方案。作为1个终端产品它内置了TC35无线模块,集成了标准的RS232接口以及SIM卡,可以在PC机上用AT命令通过串口对它进行设置。这使它成为在声音和数据通讯上通用的1个GSM双频终端产品。你可以快速的把它应用到产品开发上,同时它也可以作为产品的1个组成部分和产品结合在一起。由于本模块集成了标准的RS232接口,故只需将单片机串口的TTL电平转换为232电平,就可以将TC35模块和单片机相连,即建立起连接[9]。
2.4 超声测距功能
超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物实际距离。设计采用的超声波测距模块直流电压为5 V,静态电流小于2 mA,输出高电平为5 V,低电平为0 V,感应角度不大于15°,检测距离为0.05~5 m,该模块可直接和单片机相接,无需任何辅助电路。
2.5 温湿度测量功能
DHT11数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器。它应用专用的数字模块采集技术和温湿度传感技术,确保产品具有极高的可靠性与卓越的长期稳定性[7]。传感器包括1个电阻式感湿元件和1个NTC测温元件,并与1个高性能8 bit单片机连接。因此该产品具有品质卓越、超快响应、抗干扰能力强、性价比高等优点。每个DHT11传感器都在极为精确的湿度校验室中进行校准。校准系数以程序的形式储存在OTP内存中,传感器内部在检测信号的处理过程中要调用这些校准系数。单线制串行接口,使系统集成变得简易快捷。超小的体积、极低的功耗,信号传输距离可达20 m以上,使其成为各类应用甚至最为苛刻的应用场合的最佳选则。产品为4针单排引脚封装。连接方便,特殊封装形式可根据用户需求而提供。
温度传感器采用DS18B20,其可以程序设定9~12 bit的分辨率,精度为±0.5°。可以选更小的封装方式,更宽的电压适用范围。分辨率设定,及用户设定的报警温度存储在 EEPROM中,掉电后依然保存。DS18B20的性能价格比也较好。
2.6 蓝牙通信功能
蓝牙,是一种支持设备短距离通信(一般10 m内)的无线电技术。能在包括移动电话、PDA、无线耳机、笔记本电脑、相关外设等众多设备之间进行无线信息交换。利用“蓝牙”技术,能有效简化移动通信终端设备之间的通信,也可成功简化设备与因特网Internet之间的通信,从而数据传输变得更加迅速高效,为无线通信拓宽道路。这里采用蓝牙传输的数据量不是很大,采用一般的蓝牙模块就可满足要求[10]。
2.7 摇杆式遥控器
如图2所示,该电路包括蓝牙模块、单片机、动作识别3部分。动作识别部分的作用是当使用者向不同方向扳动摇杆时,产生相应的信号,传输给单片机。单片机通过检测传输来的信号,判断摇杆的运动状态,并将状态信息通过蓝牙模块发给教学机器人,从而实现对教学机器人的控制。
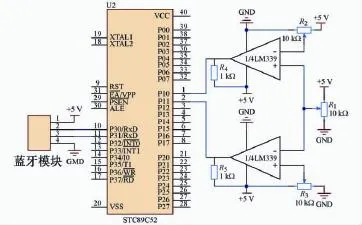
图2 摇杆式遥控器电路
如图2所示,R2、R3是两个电位器,用于产生参考电压,调节R2的值,使输入到上方LM339的电压为2 V,调节R3的值使输入的下方LM339的电压为3 V。R1是摇杆内部的一个滑动变阻器,当扳动摇杆,就会改变该滑片的位置,使输出电压发生变化。
当摇杆处于中间位置,滑动变阻器R1的滑片也处于中间位置,输出电压为2.5 V。对于上方的LM339来说,“+”端电压高于“-”端电压,输出端开路,由电阻R4上拉为高电平;对于下方的LM339来说,“+”端电压高于“-”端电压,输出端开路,由电阻R5上拉为高电平。其他操作类似。
2.8 电源设计
考虑到成本和可维护性等因素,采用铅蓄电池来提供能源。铅蓄电池的工作电压平稳、使用温度及使用电流范围宽、能充放电数百个循环、贮存性能好,造价较低。考虑到铅蓄电池的能量密度小、瞬间放电电流不宜过大等因素,采用了多电源独立供电的方式。具体方案为:
(1)机械手由3个舵机驱动,在抓取物体时,舵机处于堵转状态,经测量,此时的3个舵机的总电流可达2 A,故采用1个输出电压为12 V,容量为1.3 A·h的铅蓄电池为其供电。
(2)移动平台由4个直流电机驱动,经测量,在正常行驶情况下,电流在1 A左右,但在启动时瞬间电流较大,故采用一个输出电压为12 V,容量为1.3 A·h的铅蓄电池为其供电。
(3)在收发短信功能中使用到的TC35模块对电源要求较高,如果电源不稳定会导致模块自动关机,故采用1个输出电压为6 V,容量为1.3 A·h的铅蓄电池为其供电。
(4)除上述3部分电路外,其余电路统一由一个输出电压为6 V,容量为1.3 A·h的蓄电池供电。
2.9 显示部分设计
设计的显示部分包括主显示和副显示。主显示部分主要显示汉字,具体内容包括温度、湿度、机器人的倾角、障碍物距离、当前时间、经度、纬度、海拔等信息,由于显示内容较多,故采用一块3.5英寸的彩色液晶显示屏,该显示屏特点为安装方便,板尺寸为91 mm×81 mm,安装孔直径3 mm,4个安装孔位置距离边缘为3.5 mm ×3.5 mm,高度为 9.3 mm(算上器件高度)。微处理器可以随时读写显示存储器,而不影响显示效果,即显示不会出现“雪花”。有4页显示缓存,可以任意设定显示页和操作页。显示真彩色,16位色(65536色)。副显示部分主要显示图片,采用的是一块2.4英寸的彩色液晶显示屏,该液晶屏集成了SD卡模块,可存放大量图片,这样就解决了因单片机存储空间小而无法存放图片信息的问题,单片机只需将图片信息从SD卡中读出,传输给液晶屏显示即可[11-12]。
3 各功能模块的布局与安装
由于设计涉及到的功能模块较多,且移动平台的尺寸相对较小,采用层叠式的结构来对各功能模块进行布局[13]。具体方案是通过铜柱和胶水将相应的功能模块固定在有机玻璃板上,然后再将多块有机玻璃板连接到一起,从而构成本设计的机械本体。图3为教学机器人的侧视图。

图3 教学机器人侧视图
4 结语
依据多种控制方式并存的思想,设计完成的。机器人可以通过按键式遥控器、自制摇杆式遥控器、手机、笔记本电脑等设备对教学机器人进行控制,还可以通过语音对其进行控制。采用多种无线通信方式,并搭载了多种传感器。电路部分采用多单片机独立控制方式,软硬件均可根据需要进行剪裁。该教学机器人已应用于我校单片机课程教学,实际应用效果显著,具有良好的推广使用价值。
(References):
[1] 孙书芳,张家海,陈海霞.单片机教学中学生应用能力的培养[J].中国电力教育,2011(15):141-142.
[2] 孙迎春,徐建东,李 帅,等.Proteus软件在电子信息工程专业教学中的应用与研究[J].长沙通信职业技术学院学报,2011(4):40-43.
[3] 陈益飞.应用型工科单片机课程教学改革探索[J].中国成人教育,2011(24):140-141.
[4] 张毅刚,胡瑞强.基于Proteus的单片机课程的教学改革与实践能力培养[J].教育教学论坛,2012(5):149-150.
[5] 胡瑞强,张毅刚,李成伟.单片机课程设计教学改革探讨[J].实验科学与技术,2010(3):46-47.
[6] 刘红俊,介 战,罗红霞.教学机器人通用智能控制器的开发[J].河南科技大学学报(自然科学版),2004(8):44-46.
[7] 张培仁,张志坚,高修峰.十六位单片机微处理器原理及应用[M].北京:清华大学出版社,2005.
[8] 张常年,王振红,李 洋.ISD4004语音芯片的工作原理及其在智能控制系统中的应用[J].电子元件与材料,2001(6):80-83.
[9] 曾国敬,宋 跃,何志辉.一种智能家居远程控制系统的硬件设计[J].电子技术应用,2011(4):81-84.
[10] 金 纯,许光辰,等.蓝牙技术[M].北京:电子工业出版社,2001.
[11] 沈红卫.基于单片机的智能系统设计与实现[M].北京:电子工业出版社,2005.1.
[12] 郭天祥.51单片机C语言教程[M].北京:电子工业出版社,2008.
[13] 安丽桥,朱 磊,王 勇,等.六脚足式步行机器人的设计与制作[J].实验室研究与探索,2006,25(2):167-168.学学报,1998.28(2):107-111.
