电梯模型在可编程控制器实践教学中的应用
2013-05-16杨小林潘丽萍
杨小林, 潘丽萍
(浙江大学电气工程学院,浙江杭州 310027)
0 引言
随着现代自动化技术水平的不断进步,PLC在实际的工业控制中起到了十分关键的作用,而且在现代高校的自动化教学中,PLC也成为一门必不可少的课程。但如何将学生所学的知识与实践结合起来却是一个很大的问题。在以往的课程教学中,通常只是通过仿真软件或一些简单的PLC控制实验,让学生简单体验硬件的接线、编程软件的使用以及一些指令的用法,学生很难建立一个系统的概念。
本文以天煌THPFDT-2六层电梯教学实训模型为对象,结合三菱FR-D700变频器,介绍了如何利用可编程控制器设计电梯模型的自动控制系统,主要包括该系统的硬件组成、主控程序的控制流程图、主要控制模块的梯形图程序以及上位机监控界面的设计等。同时,该课题结合模块化设计的思想,简化了电梯控制中复杂的逻辑设计,使得该实例可以很好地将课程中的许多知识点贯穿到实际应用中。
1 电梯模型简介
1.1 电梯模型组成
该款用于教学实践的仿真电梯模型一共设有7层,其中底层为检修层,第二层开始为正常使用层,如图1所示。电梯结构分为实验机架、拽引机、轿厢、对重铁、轿厢轨道、对重铁轨道、变频器、语音到站钟、33点输出端口以及31点输入端口等。

图1 电梯实训模型
1.2 电梯模型功能
该电梯模型主要有正常运行模式和检修模式,且检修模式的权限高于正常运行模式。检修模式下主要检查电梯的上下行功能,轿厢门开关功能,急停功能,火警功能等是否正常[1]。正常模式下,电梯响应轿厢内外各个层的呼叫信号,并准确做出应答——包括电梯运行方向、自动平层、开关门等操作。其主要控制要求为[1]:① 电梯下行;② 电梯上行;③ 电梯随时对轿厢内外召唤信号进行登记;④ 电梯运行到某一层后,对该层轿箱内外登记信号进行消除;⑤ 轿厢上下行时,只响应顺向截梯信号,保留反向呼梯信号。
2 控制系统的硬件设计
本项目的系统框图如图2所示。
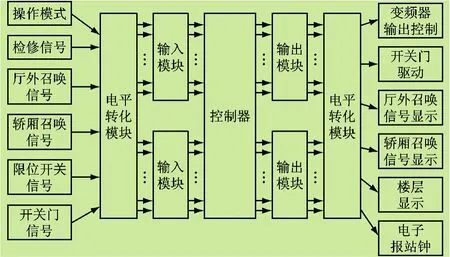
图2 系统框图[2-3]
2.1 控制器的选择
由于系统包含32点开关量输入和31点开关量输出信号,见表1、2,系统的程序也不需要占用很大的内存,所以选择处理器时只要能满足系统的输入输出点数就可以了。本系统选用的是美国罗克韦尔公司SLC500系列的处理器[4-5],该处理器模块化的结构使得硬件设计更为灵活方便。
2.2 输入、输出模块的选择[6]
如上所述,电梯实验模型具有32点的数字量的输入端口和31点的数字量输出端口,所以选用了两块型号为1746-IB16的16点输入模块分别插在机架的1槽和2槽,对应的输入地址为I:1/0~I:1/15和I:2/0~I:2/15;两块型号为1746-OB16的16点输出模块,分别插在机架的3槽和4槽,对应的输出地址为O:3/0~O:3/15和O:4/0~O:4/15。由于电梯模型提供的信号电平逻辑刚好和SLC输入/输出模块的电平相反,故系统中还添加了两块电平转换模块。
各输入、输出信号说明及对应的地址详见表1、2。

表1 输入端口说明以及地址表示
2.3 变频器的配置[7]
本系统采用三菱公司生产的FR-D700变频器,通过改变其相应参数来改变电梯模型拽引机的加速和减速的状态,从而实现对电梯模型的拽引机进行变频调速。利用S型曲线对电梯进行控制,如图3所示。该方式在加速的起始阶段,频率的上升较缓,电梯加速度a逐渐变大,加加速度ρ为一恒定值。如AE段所示,在电梯达到匀速运行之前,电梯加速度逐渐减小。BC端电梯进入稳定运行状态,此时电梯匀速上升。电梯的减速过程与加速过程类似。

表2 输出端口说明以及地址表示
通过修改变频器相关参数[7]以及对变频器STF端(O:3/0)和STR端(O:3/2)的控制,可以让电梯在上、下行时达到图3所示的运动状态。

图3 速度控制曲线
3 控制系统的程序设计
3.1 主控程序的设计
电梯实训模型的控制程序设计比较复杂灵活,可以分为检修模式和正常运行模式,对于正常运行模式来讲,其程序的设计又可以分为轿厢内外信号登记与显示、最大值登记、最小值登记、电梯选向、顺向截梯、轿厢开关门等部分,因此在程序设计中,我们将整个程序分为多个模块,分别进行单独的设计与调试,最后将不同的模块拼接起来进行综合调试。图4为系统主控程序的控制流程图。
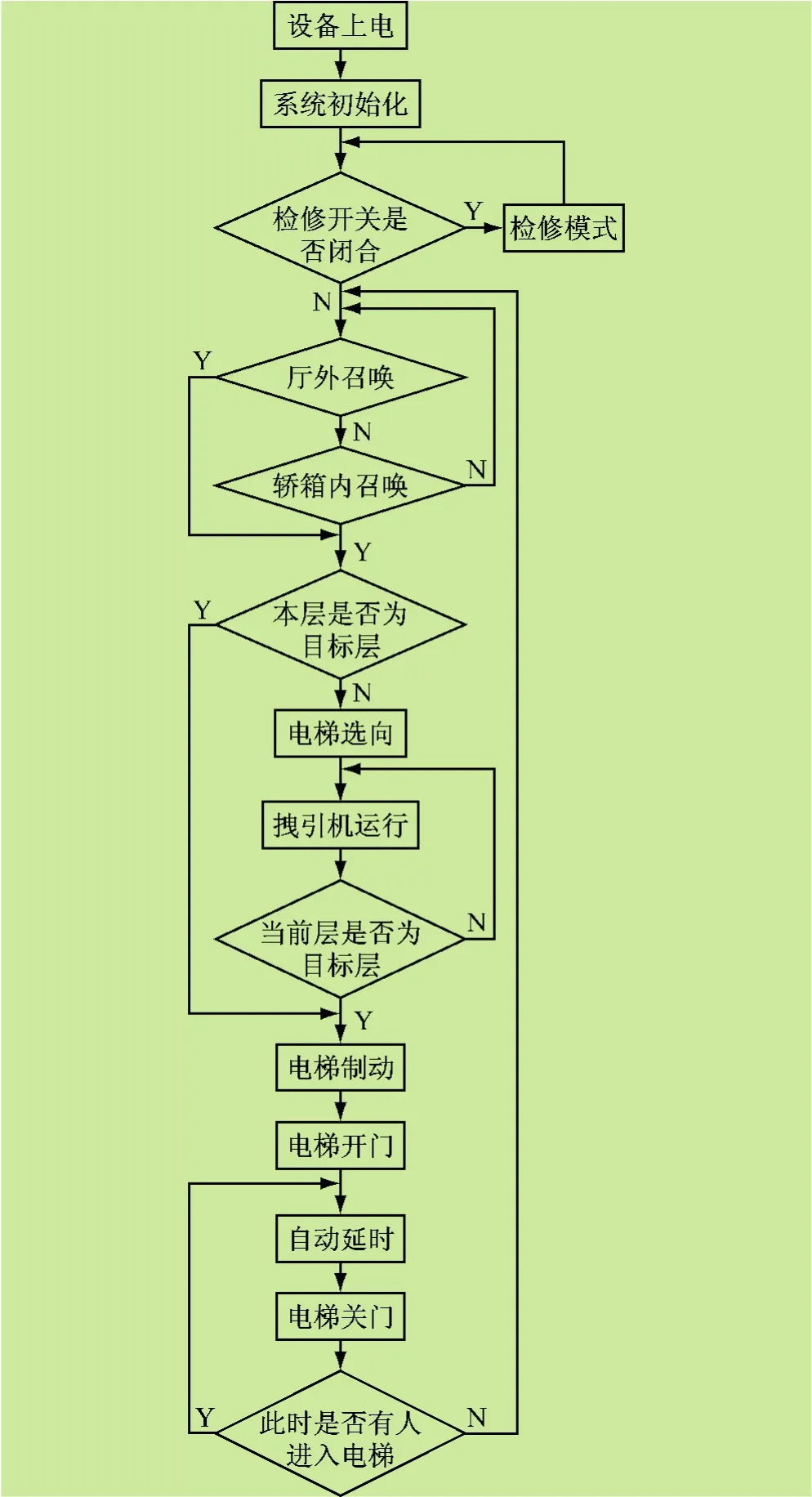
图4 主程序流程图[8]
3.2 电梯选向以及顺向截梯程序设计[9-10]
通过控制变频器正反转输出,可以控制电梯上行或者下行运行,且电梯上升或下降一定楼层数,对变频器STF或者STR端控制时间是固定的[11],通过测试分别为:一层 4.45 s;两层 8.90 s;三层 13.35 s;四层17.80 s;五层22.25 s。基于此,我们设计了相应的电梯选向与顺向截梯程序。
图5为电梯上行选向控制程序,其中N7:10存储的最初所在楼层信号。当电梯向上运行时,B3:2/0处于闭合状态,就不允许电梯低层的召唤信号与最低选层信号进行比较,只有当电梯上升到已登记的最高层时,才允许电梯下行与最低选层信号进行比较。电梯下行的选向控制与上行选向控制程序有相同的结构。
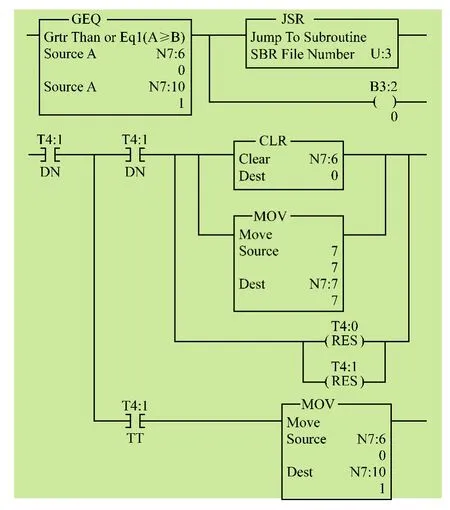
图5 电梯选向控制(电梯上行判断)的梯形图程序[12]

图6 电梯上行顺向截梯设计(1层为例)的梯形图程序[13]
图6为电梯上行顺向截梯1层的判断程序。利用RTO计时器指令,我们可以由最高选层信号N7:6与最初所在层N7:10,计算得到电梯上行总共所需的时间,并将其作为T4:0的预设值,同时在电梯运行当中我们也仍可以对预设值进行刷新,只要更高楼层有召唤信号。电梯的平层动作由电梯最初所在层与召唤信号所在层之差计算而得,N10:1中存储了电梯从最初层上行到该层所需时间,当这个时间与RTO中得累计值相同时,电梯停止并跳转到轿厢的自动开关门程序。
3.3 上位机监控程序的设计
本系统采用Rockwell公司的RSview32上位机监控软件[14],即为利用RSView32设计制作的人机交互界面。通过通信软件RSlinx,控制器与上位机之间以OPC的方式[15]进行数据交换,这样就可以利用上位机对电梯进行监控。
4 结语
本电梯实训模型包括了实际电梯系统中的主要部分,在具体教学应用上可以对系统进行分解,包括硬件设计、输入输出逻辑地址的确定、各功能块的软件编程以及上位机监控界面的设计等,使学生充分掌握整个控制系统设计的各个环节。可编程控制器本身就是一门应用性很强的课程,通过对这类实训模型控制系统的设计,使课程能够真正做到从实践中来再回到实践中去,同时使学生的实践和创新能力都得到了极大的提高。
(References):
[1] 何 强.基于变频技术的电梯PLC控制系统设计[D].合肥:合肥工业大学,2010.
[2] 罗锋华,房 驰.西门子S7—200 PLC及变频器在电梯控制系统中的应用[J].电机与控制应用,2010,37(11):42-50.
[3] 谌海云,刘晓伟,武占奎,等.基于Rockwell PLC的电梯模型控制系统的设计[J].仪器仪表用户,2010,17(1):35-36.
[4] 赵 静.PLC控制系统在实验实训电梯中的应用研究[D].大连:辽宁师范大学,2004.
[5] 顾德仁,徐惠钢,郭文华.基于PLC的电梯高精度位置控制的实现[J].微计算机信息(测控自动化),2007,24(5-1):61-63.
[6] 万健如,邓 旋,林志强,等.PLC在电梯位移控制中的应用[J].电机传动,2001(1):33-35.
[7] 王子文,骆建华.电梯PLC控制策略及其程序设计[J].起重运输机械,2006(7):14-17.
[8] 芦艳芳,朱贵宪.基于PLC的电梯控制系统设计[J].煤炭技术,2011,30(8):53:55.
[9] 陈步荣,周燕飞.教学实验用模型电梯的设计与实现[J].长沙航空职业技术学院学报,2007,7(1):26-33.
[10] 黄桂梅,刘永立.PLC电梯控制系统的设计与实践[J].制造业自动化,2007,29(4):81-82.
[11] Philipp Friese,Jorg Ramhau.Online-optimization of multi-elevator transport systems with reoptimization algorithms based on setpartitioning models[J].Discret Applied Mathematics,2006(154):1908-1931.
[12] 臧华东.基于三菱通用变频器的双匀速电梯系统设计[J].仪器仪表学报,2010,31(8):62-66.
[13] 焦宇敏.PLC与变频器在电梯控制过程中的运用[J].机床电器,2010(2):43-45.
[14] Xiaoling Yang,Qunxiong Zhu,Hong Xu.Design and practice of an elevator control system based on PLC[C]//Pro of 2008 Workshop on Power Electronics and Intelligent Transportation System.NJ:IEEE,2008:94-99.
[15] 浙江大学罗克韦尔自动化技术中心.可编程序控制器系统[M].杭州:浙江大学出版社,2005:64-80.
