大功率碟式太阳能电站大风预警系统设计与研究❋
2013-05-15刘年霖彭佑多王旻辉彭长清
刘年霖,彭佑多,王旻辉,胡 亮,彭长清
(1.湖南科技大学 机械设备健康维护省重点实验室,湖南 湘潭 411201;2.湘电集团太阳能事业部,湖南 湘潭 411101)
0 引言
碟式太阳能电站是包括大型网架支撑机构、双轴驱动系统和聚光器等在内的复杂机电系统,具有空间尺寸大(聚光器直径Φ13 m,高18 m)、自重大(13 t)和抗风载要求高(8级风正常运行,抗最大风力12级)等特点,是确保太阳能电站高效、可靠、稳定运行的关键。极端天气下的大风对安装在露天的太阳能发电系统的危害很大:①可能会引起太阳能发电系统的严重变形甚至损坏性倒塌,因为整个太阳能发电系统几乎全为钢结构,其总量占了整个太阳能发电系统的70%,在强风力的作用下,整个太阳能发电系统会出现“头重脚轻”的现象,导致支撑系统倒塌;②大风会使网架变形,尽管集热器通过球头螺栓连接在网架上,但网架变形过大,同样会引起集热镜损坏。因此,设计研究大风预警系统是有必要和重要意义的。
1 大风预警系统方案优选
本文所述大风预警系统主要由传感器、控制器和驱动装置构成,可有以下4种组成方案:
(1)运动控制器+直流驱动器+直流电机。该方式使用的年限长,方法稳定、可靠,调速性能好,但是直流电机结构复杂,维护成本高。
(2)运动控制器+变频器+三相异步电机。该方式继承了直流系统的优势且结构简单、维护成本低,但是控制精度有待提高。
(3)专用型伺服驱动器+伺服电机。专用型伺服驱动器是将运动控制器用软件集成的方式写在伺服驱动器中,该方案相应系统只能完成特定的控制过程,无法实现功能扩展。
(4)运动控制器+伺服驱动器+伺服电机。采用运动控制器,可以根据任务的需要更好地扩展其控制功能,并提高控制精度,而且降低了维护成本。
碟式太阳能电站对日跟踪系统需用双轴驱动控制方案,双轴驱动系统设计有确定的伺服电机、驱动机构及控制器硬件系统。因此,本文所述大风预警系统只需在双轴驱动系统的基础上增加风速传感器和预警控制器。同时综合考虑预警系统的可实现性和成本,以及系统拓展控制功能的可能需求,拟采用第4种组成方案。预警控制系统的结构框图如图1所示,该预警控制系统由传感器(风速传感器和绝对位置编码器)、上位机、运动控制器 (PLC)、伺服驱动器、伺服电机、机械传动机构和聚光器组成。
2 大风预警系统原理设计
大风预警控制系统采用业内最为普遍的闭环控制方式,其优点在于运动控制器能根据给定信号与反馈信号的差值来不断改变输出给伺服驱动器的脉冲频率,达到实时调整伺服电机速度的目的,有效消除聚光器大质量惯性对位置的影响,从而保证聚光器的位置精度。
在系统运行过程中,风速传感器将检测到的风速以脉冲形式输入到运动控制器中,当输入的脉冲数大于运动控制器中已设定的8级风对应的脉冲数时,运动控制器向伺服驱动器发出一定的脉冲数和脉冲频率,驱动方位角伺服电机停止动作,高度角伺服电机快速使聚光器到达水平状态位置(由参考文献[6]可知,聚光器在水平状态位置所受风载荷下的应力最小),然后停止动作。此时,太阳能发电系统以最少迎风受力面躲避大风。预警控制系统的控制流程如图2所示。
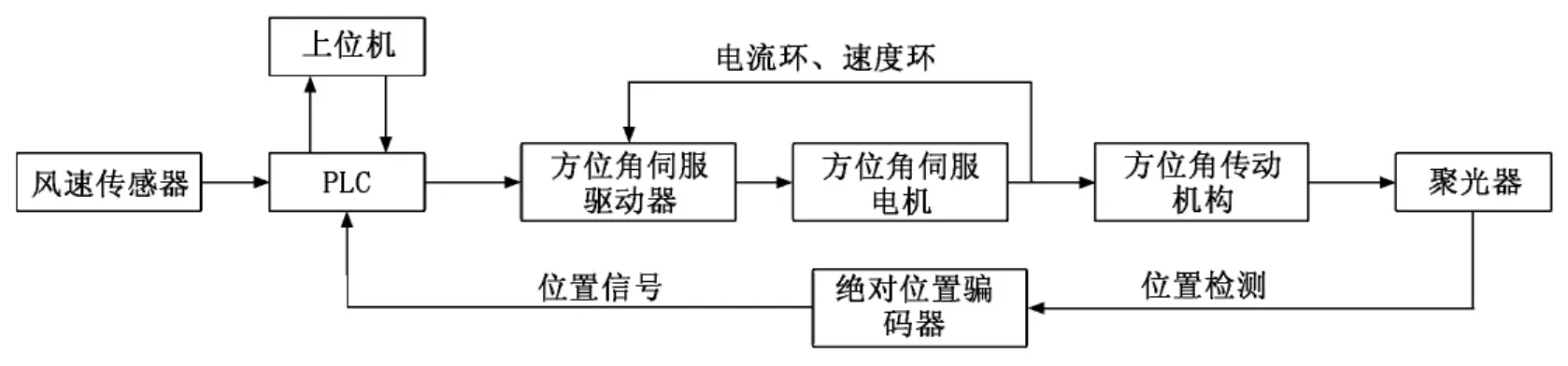
图1 预警控制系统的结构框图
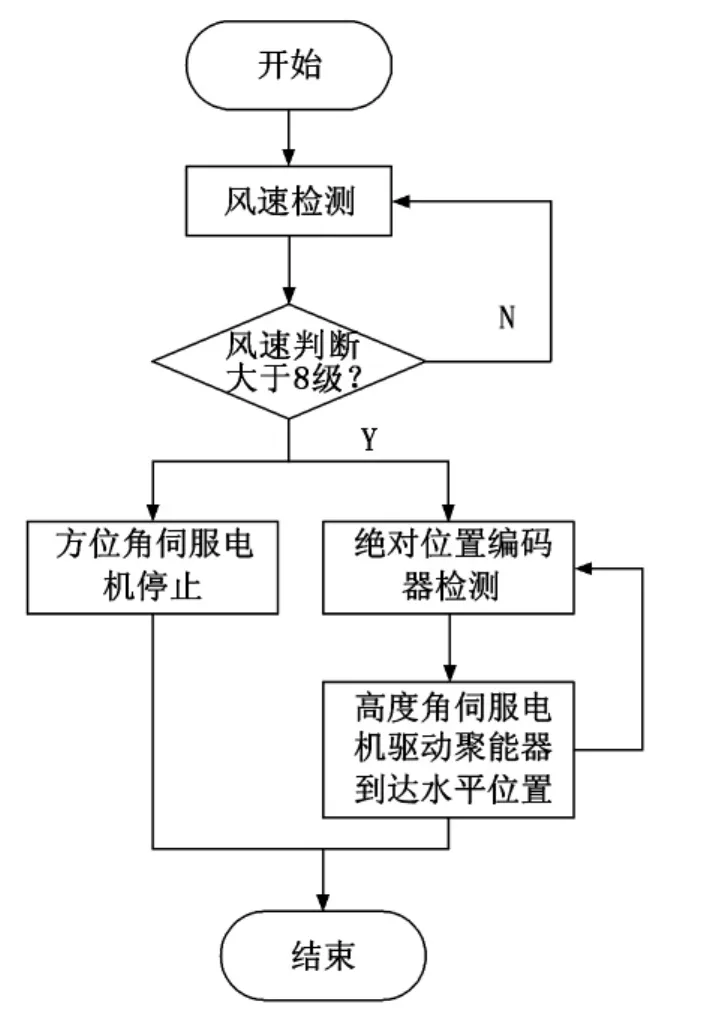
图2 预警控制系统的控制流程图
3 预警系统综合性能仿真分析
图3是预警控制系统的方框图。其中给定位置是控制器根据传感器的输入值给定的;伺服系统是由伺服驱动器和伺服电机构成的双闭环控制系统,其包含电流内环和速度内环;高度角传动机构由行星减速器、蜗轮蜗杆和丝杆组成;在输出端加入绝对位置编码器,使整个系统构成闭环控制,使聚光器动作平稳,位置精确。
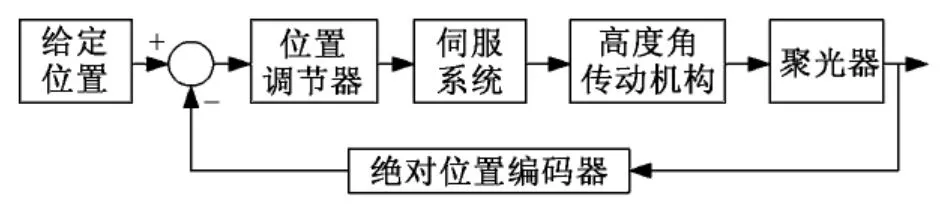
图3 预警控制系统的方框图
3.1 伺服系统模型的建立
图4 为伺服系统动态结构图。在该伺服系统中,伺服电机选用交流永磁同步电机,它与伺服驱动器构成电流环在内、速度环在外的双闭环控制系统,能有效抑制电流环内部的干扰和速度波动,提高系统的快速性,并保障系统的安全运行。
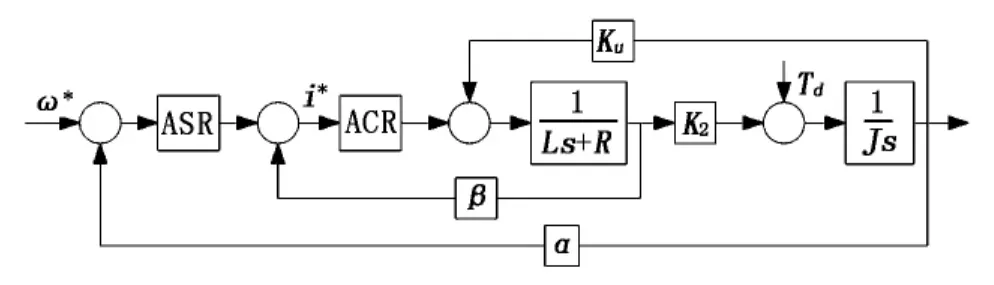
图4 伺服系统动态结构图
图4 中,ω*为转速给定,i*为电流给定,L为电枢电感,R为定子电阻,J为转动惯量,Td为负载转矩,Ku为反电势系数,KL为转矩系数,ASR为速度调节器,ACR为电流调节器,α为速度反馈,β为电流反馈。
3.2 高度角传动机构模型的建立
将高度角传动机构等效为一个二质量模型,得方程:

其中:JL为等效转动惯量;B为等效阻尼;θL为机构输出转角;ML为负载转矩;Me为电机输出转矩。
在线性范围内,弹性方程可被描述为:

其中:K为等效刚度;θe为机构输入转角。将式(2)代入式(1),并经拉普拉斯变换,可得机构输出的角度方程为:

ML被看作是对系统的干扰量,因此,在推导传递函数时可忽略。于是,得传递函数为:

其中:ωn为传动环节的固有频率,ωn=;ξ为系统的阻尼系数由于最后是由蜗轮蜗杆机构传递动力和运动,带动丝杆作旋转直线运动,因此可得:
其中:Ph为丝杆导程。从而式(4)可以改写为:

3.3 预警控制系统响应特性分析
在预警控制系统中,如果放大器单纯采用积分控制,则不能有效减小过渡时间过程和消除稳态误差,进而不能使聚光器平稳快速地到达指定位置。因此,为了满足系统的动态性能要求,这里采用经典PID控制。预警控制系统的Simulink仿真模型如图5所示。

图5 预警控制系统仿真模型图
在单位阶跃信号输入下预警控制系统的响应曲线如图6所示。从仿真曲线图可以看出,在给定位置信号与实际位置信号相差很大时,系统立即响应,快速向给定值趋近,误差立即减小,随着差值的减小,响应速度也适当放慢,最后平缓地到达指定值。整个过程平稳快速,有效地消除了稳态误差和超调量,防止了惯性作用产生的位置误差,从而有效保障了位置精度。
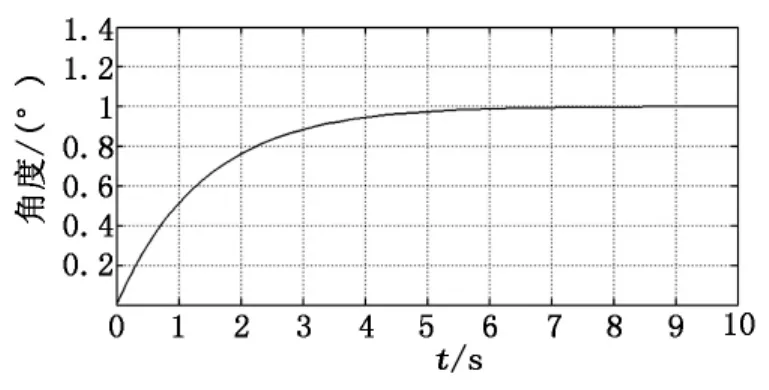
图6 预警控制系统单位阶跃信号响应曲线仿真图
4 结束语
本文设计了由运动控制器、伺服驱动器和伺服电机等构成的大风预警控制系统,并对控制系统进行了详尽的分析,推导出了伺服系统的传递函数以及机械传动机构的数学模型,并利用 MATLAB中的Simulink工具箱对系统进行了仿真分析。仿真结果表明,大风预警控制系统结构合理,可靠性高,能够满足快速响应和位置精度的要求。当8级以上大风来临时,可对整个太阳能发电站的安全保护起到关键性的作用,同时避免设备的损坏。
[1] 林雪松,周婧,林德新.MATLAB7.0应用集锦[M].北京:机械工业出版社,2006.
[2] 宋开峰.新型太阳能跟踪装置机构的研究[D].天津:河北工业大学,2004:1-7.
[3] 彭长清,彭佑多,胡燕平,等.大功率单碟式太阳能聚光器跟踪控制系统研究及实现[J].湖南科技大学学报(自然科学版),2012,27(3):28-34.
[4] 杨红波,徐振越,肖和平.PLC伺服驱动器控制在飞锯机中的应用[J].机械与电子,2009(11):31-33.
[5] 裴亮,洪荣晶,王华.基于 MATLAB的太阳能二自由度跟踪系统建模与仿真[J].机械与液压,2008,36(12):155-157.
[6] 孙吉,马纲.基于ANSYS的微波卫星天线力学分析[J].机械工程与自动化,2008(2):28-30.
[7] 殷曰键,朱元,吴耿泽.永磁同步电机三闭环伺服控制设计及实验[J].设计与分析,2011(18):167-168.
