地理国情普查工作中车载移动测量系统更新DEM方法的探讨
2013-05-15雷邦俊
叶 玮,雷邦俊,周 扬
(贵州省第二测绘院,贵州贵阳550004)
一、引 言
为全面掌握我国地理国情现状,满足经济社会发展和生态文明建设的需要,2013年3月5日,《国务院关于第一次全国地理国情普查的通知》(国发〔2013〕9号)印发,决定于2013年至2015年开展第一次全国地理国情普查工作。随后,全国地理国情普查第二批试点项目选定,笔者所在单位在生产实践中,发现目前贵州省的DEM成果已不能满足正射影像纠正精度的需求。本文针对这一问题提出了一种解决方案,即利用车载移动测量系统MMS采集物体三维坐标点云,并快速高效地获取变化区域的数字高程模型,以解决地理国情普查工作中正射影像纠正精度的问题。
二、车载移动测量系统简介
车载移动测量系统(mobile mapping system,MMS)是近年来新兴的一项测量技术,其原理主要是利用发射和接收激光束来量测被测物体与系统之间的相对位置,即通过卫星定位设备获取系统的地理坐标,利用汽车的运动和扫描镜头的旋转覆盖地物的表面,获取地面物体的三维坐标点云,并以此获取高分辨率的数字高程模型。激光雷达技术突破了传统单点测量方法的限制,具有高效率、高精度、高密度、穿透性、主动性、数字化、自动化等特性。
三、地理国情普查中遇到的问题
目前贵州省1∶10 000基础DEM成果数据是将贵州省第一代纸质地图矢量化后获得的。但随着贵州省近年来经济建设的快速发展,不仅新增了大量的工业园、住宅区、交通网线、水利设施,地形地貌也发生了巨大变化。因此以这样的DEM数据作为基础将会导致纠正后的影像存在较大偏差,尤其是新建道路及其附属设施(桥梁、隧道、路堤、路堑、护坡等)。
此外,高速公路影像遇桥梁及山体开挖时变形很大,呈扭曲现象。与矢量数据对比统计,高速公路区域影像纠正后的平面中误差已经超过10 m,部分地区甚至超过了20 m。因此,急需对DEM数据进行必要更新。
四、传统的解决方案
通常对1∶10 000DEM数据的更新技术主要有航测成图和外业实地补测两种方式。
1)航测成图适合大区域的更新测量。相对而言,贵州省影像数据获取难度大,是全国公认的影像获取难点区域。目前,贵州省内大部分地区的影像数据仍停留在20世纪80年代,少部分地区还停留在70年代,最新的数据也仅为2007—2009年左右。在这种数据条件下如果用航测的方式根本不能进行有效的DEM数据更新;而采用航飞的方式获取最新的影像,一是周期长,二是经费高,且往往航空摄影的飞机在贵州等候可飞行的天气就长达3~5个月的时间。
2)用全站仪或GPS进行外业实地补测,适合小区域更新测量。其工作量大、经费高,也无法进行成区域大面积的数据更新。
两种方式对于时间紧、面积居中的区域来说,都有一定缺陷。因此,如何快速准确地更新项目区的DEM数据,是一项急需解决的重要问题。
五、车载移动测量系统更新DEM的方法
1.移动数据采集
移动测量车作业需要GPS基站提供差分处理数据,以提高点云数据精度。本次试验架设的基站位于项目区。
移动测量车在试点区域共采集了约100 km的点云数据,采集的对象主要是高速公路路面、路堤、护坡等附属物,以及城市和开发区的街道及建筑物。
2.点云数据处理
点云数据处理首先进行了滤波处理,以剔除采集过程产生的噪点。滤波处理所使用的软件为硬件供应商提供的点云数据处理软件。点云数据滤波处理后效果如图1所示。
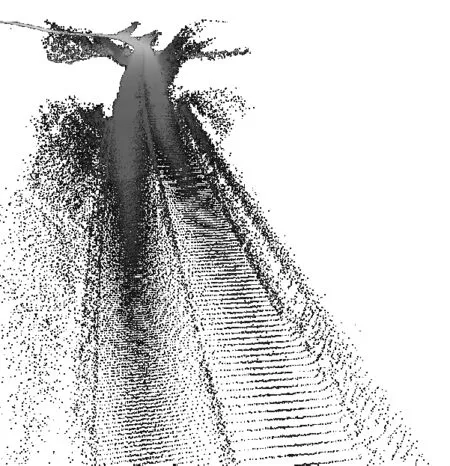
图1 经过滤波处理的高速公路点云数据效果图
3.DEM制作
获取的点云数据中大量存在道路上的车辆,道路两旁的树木、行人等其他非地形点,因此采用合适的滤波方法快速检测出有效的地面数据是能否快速更新DEM数据的关键。笔者在与移动测量系统提供商充分交流合作后,应用了移动窗口滤波法对地面激光数据进行快速过滤处理。其基本原理是建立一个与点云密度有关系的尺度的移动窗口,找到最低点,计算出地形模型。
(1)滤波格网建立
根据移动测量设备激光点云密度确定窗口取舍大小,若地面激光点云密度高,移动滤波窗口可选取小一些;若地面激光点云密度低,移动滤波窗口需要选择大一些。本次试验过程中选取的移动滤波窗口为1~2 m。
(2)滤波方法
确定窗口后可将窗口内的离散激光点云数据进行对比,根据实际地形选择过滤最高点、平均点、最低点的方式进行滤波处理。本次试验中大量的点云为高速公路周边激光点云数据,因此在高速公路中采用最低点过滤方式;在开发区道路及城市道路中根据点云密度及道路周边地表物复杂程度分别选取了最低点与平均值两种方式进行多次滤波处理。
(3)DEM 生成
对滤波后的点云数据建立TIN不规则三角网,并内插为所需要的DEM数据。采用常用的GIS软件制作DEM会出现无数据区域的TIN,因此需要单独对DEM数据进行裁剪或利用TIN工具的功能避免无数据区的TIN生成。
4.影像纠正效果对比
使用更新后的DEM对卫星影像进行纠正试验,并与原始DEM纠正的影像进行对比测试,如图2、图3所示。
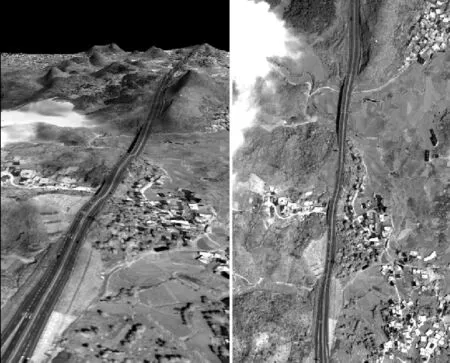
图2 DEM更新前纠正的影像三维、二维效果图
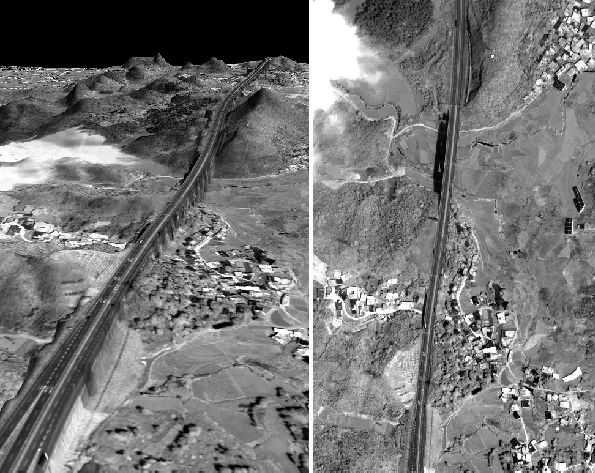
图3 DEM更新后纠正的影像三维、二维效果图
DEM更新前后纠正的影像,在高速公路区域采集具有高速公路数据的1∶10 000 DEM数据同名点,并进行比较。由于控制点离项目区距离较远,将近25 km,同时控制数据的精确WGS-84坐标没有获取到,因此平面位置精度较好,高程精度一般,但都能达到地理国情普查的需求。结果见表1。
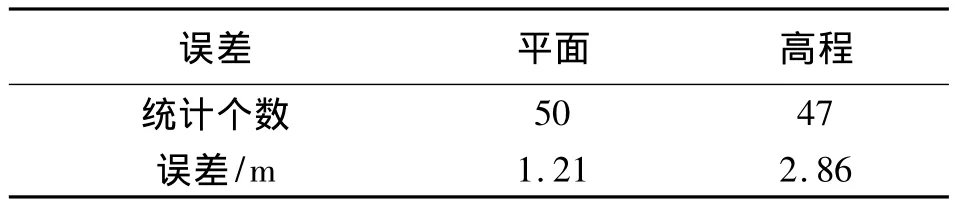
表1 同名点精度比较
由图3可以看出,利用更新后的DEM数据纠正影像,地形变化较大部分有了很大改善,能够正确地反映出实际的道路、桥梁、护坡等建筑与地形,同时精度依然可靠有效,满足了地理国情普查的成果数据要求。
六、结 论
根据以往的作业经验,针对本试验区域,对航测成图、外业实测与车载移动测量系统采集3种DEM制作方法作一个理论上的简单比较,见表2。
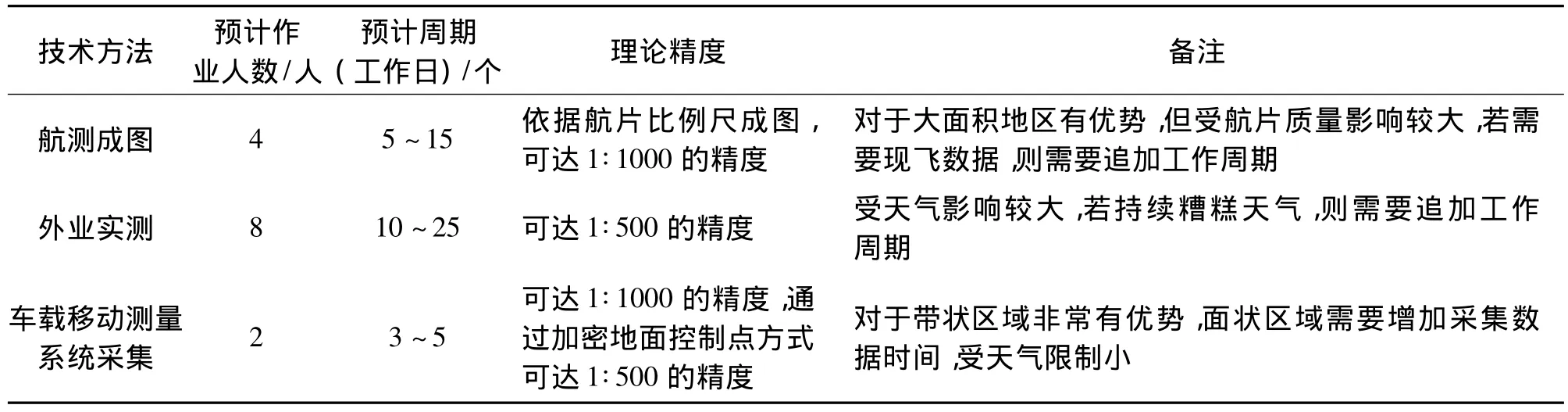
表2 不同DEM更新方法比较
从表2看出,利用车载移动测量系统采集相对于传统的DEM制作方法有着无可比拟的高效性。
近年来贵州经济建设快速发展,贵州省交通运输厅提供的资料显示,至2013年底,贵州全省高速公路里程将达到3281 km,而到2015年,高速公路里程将超过4500 km,基本实现“县县通高速”的目标。贵州山区高速公路建设基本按照开山架桥的方式进行,地形破坏严重,单靠软件和传统的测量手段进行DEM更新,在时间和精度上已经不能满足需求;并且地形地貌变化较大的区域主要集中在人类经常活动、经济发达的区域,因此DEM的更新不但要快速,而且精度要可靠、地域要有针对性。
综合来看,车载移动测量系统具有不受空中交通管理限制的优势;在人类常活动、经济发达区域可进行无限制数据采集;受天气限制因素小,在多云甚至小雨天气都可进行数据采集。因此,利用车载移动测量系统对1∶10 000DEM数据进行更新具有速度快、效率高、针对性强的优势。
[1] 蒋晶珏.复杂城市环境的机载LiDAR点云滤波[J].武汉大学学报:信息科学版,2007,32(5):402-405.
[2] 刘艳丰.基于kd-tree的点云数据空间管理理论与方法[D].长沙:中南大学,2009.
[3] 张皓.一种基于平面拟合的LiDAR点云滤波方法[J].测绘科学,2009,34(4),141-143.