基于小波变换与多帧平均法融合的背景提取
2013-05-11韩露莎
彭 宏,韩露莎,王 辉,傅 钟
(1.浙江工业大学信息工程学院,浙江杭州310032;2.银江股份有限公司银江实验室,浙江杭州310030)
基于小波变换与多帧平均法融合的背景提取
彭 宏1,韩露莎1,王 辉2,傅 钟2
(1.浙江工业大学信息工程学院,浙江杭州310032;2.银江股份有限公司银江实验室,浙江杭州310030)
利用虚拟检测圈法对道路交通视频进行处理,可以检测出道路上运动车辆的车速.而虚拟检测圈法首先需要得到准确的视频道路背景图像.针对交通道路视频,在背景提取算法仿真分析的基础上,利用小波变换,将提取到的背景图像进行一级小波分解,得到各分量图像.通过对水平分量、竖直分量及对角分量进行去噪处理后,再采用小波重构得到最终的背景图像.采用该方法所得背景图像能有效地减少主要背景提取算法中存在运动车辆轨迹的缺点.
背景提取;小波变换;图像去噪;运动目标检测
目前,交通问题是城市发展规划的主要问题之一.智能交通系统(ITS)是把各类先进的技术有效地融合运用到整个交通运输管理体系,从而建立起实时、准确、高效、综合的运输和管理系统.各类先进的技术包括信息、通讯、传感、控制以及计算机技术等.交通视频检测设备是ITS的重要组成部分,它可以通过分析视频图像序列检测道路车辆运输状况,并实时反馈给交通管理系统.视频检测时,主要的运动目标检测算法有:光流法[1]、相邻帧差法、背景差法[2].光流法能实现对复杂的运动目标进行检测和跟踪,并能克服光亮度变化的影响.但这种方法采用迭代算法,计算时间较长,无法满足实时检测的需要,并较容易受噪声的影响.相邻帧差法是通过对两帧连续图像进行差操作得到运动目标的位置、形状等信息,但得到的运动物体多为边框图,存在较大的空洞,分割出的运动目标不完整.背景差法相对以上两种算法,实现简单、运算速度快以及检测较准确.该方法主要步骤包括背景图像的提取及更新,以及利用背景图像与当前帧图像的差值进行运动目标的检测.背景差法的核心是如何找到一个稳定的背景模型,则其关键是如何从有运动目标的视频图像中找出可靠的背景图像.在多帧平均法背景提取的基础上,利用小波变换将预提取的背景图像进行分级及去噪处理,消除背景中的车辆痕迹,以便能更有效地提取出前景或运动目标.
1 二维离散小波变换
二维小波变换能够将一幅图像分解为近似、水平、竖直及对角细节分量,对于图像的分析具有重要作用[3].
在二维情况下,小波变换需要一个二维尺度函数φ(x,y)和三个二维小波ψH(x,y),ψV(x,y),ψD(x,y).它们都是一维尺度函数φ和相应的小波函数ψ的乘积为

其中:式(2-4)分别为度量沿着水平边缘、竖直边缘及对角线边缘的方向的图像灰度变化.图1给出图像的小波分解与重构原理.

图1 图像的小波分解和重构Fig.1 Wavelet decomposition and reconstruction of an image
2 三种常见背景提取算法的分析与比较
2.1 统计中值法
在一段时间内,统计N帧连续图像中每个像素点对应的灰度值中值,令其为背景图像的灰度值.在目标车辆较简单且少的情况下,连续多帧图像中实际静态背景的像素值占主要部分,则在一段时间内统计的中值便可为背景的像素值.该算法首先从统计学的角度检测出单个像素点(x,y)在连续多帧图像中的灰度值Ii(x,y)(i=1,2,…,N),并在一段时间内对已统计的灰度值Ii(x,y)进行排序,取其灰度值的中值B作为背景,即

其中Ii(x,y)为第i帧序列图像在像素点(x,y)的灰度值.
当运动车辆少且速度较快时,可得到较好的背景图像.对于运动车辆多且速度慢时,会误把运动目标当成背景统计出来,得到失真的背景图像.该算法计算量较大,处理较慢[4].
2.2 多帧平均法
考虑到运动车辆的灰度值与背景的灰度值之间存在较大的差异性,运动车辆目标经过像素点位置引起的灰度变化可在一定时间段内按取像素平均值的方法来消除.该方法将运动车辆目标当作噪声,用累加平均的方法消除该噪声.采用此方法会造成背景均值的偏移.背景图像为

该算法模型简单、计算方便,但背景图像受运动车辆数量及速度的影响较大.累加的帧数越多,提取的背景图像越接近真实背景,但运算量及需要的内存也增加,这可以采用迭代算法来降低复杂度[5].
2.3 连续帧差法
该方法由Gupte等提出,通过当前帧和前一帧的像素差值来确定运动区域[6-7].非运动区域的背景用当前帧进行更新,运动区域的背景则保持不变,经过一个时间段的迭代就可提出背景图像.步骤如下:
1)将原始图像I0(x,y)用第一帧图像P0(x,y)代替.
2)q=1.
3)将当前帧与前一帧进行差分后,计算差分图像的二值图像,即

其中:Iq(x,y),Iq-1(x,y)分别为当前帧图像和前一帧图像;为帧间差分;T为阈值.
4)背景更新

其中:α为更新速度系数,它的取值由背景本身变化的速度决定.
5)q=q+1,返回第3)步,进行下一帧的迭代步骤.
连续帧差法检测较准确,且速度较快,但较准确的背景必须经过若干帧的迭代运算后才能得到.该算法对帧差分本身没有进行进一步的处理,易将具有相似纹理的前景区域误判为背景.
3 基于小波变换的多帧图像平均法
基于上述对三种常见背景提取算法的分析结果得出,利用多帧平均法对道路交通视频的检测为较优选择.因为统计中值法运算量大,处理速度慢,不能满足实时检测的需求;连续帧差法虽然计算速度快,但易将具有相似纹理的前景误判为背景,造成误差;多帧平均法算法简单且速度较快,使用于道路交通视频的实时检测.但利用多帧平均法得到的背景图像还存在一定的运动轨迹的干扰,故提出利用小波变换消除运动轨迹的影响,从而提高背景提取的可靠度.多帧平均法提取的背景图像中的运动轨迹干扰可看作图像的噪声,且此噪声在图像上表现出一定的直线区域分布.利用小波变换,提取图像的水平、垂直及对角分量,并对其进行去噪处理,以至消除运动轨迹.基于上述分析,提出一种基于小波变换的多帧平均背景提取法,实现对道路交通图像序列的背景提取.算法的步骤如下:
1)对图像序列中前N帧进行多帧平均得初始背景图像为

2)对背景图像B(x,y)进行一级小波分解,得到此图像矩阵的低频分量、水平细节分量、竖直细节分量及对角细节分量.
3)对水平细节分量、竖直细节分量以及对角细节分量作3×3模板均值滤波的去噪处理,得到处理后的水平细节分量、竖直细节分量及对角细节分量.
4)利用低频分量与处理后的水平细节分量、竖直细节分量以及对角细节分量,对图像进行小波重构,小波重构得到的图像作为最终背景图像.
4 实验仿真结果与分析
本实验采用图像帧为640×480的24位RGB视频序列,视频为25帧/秒,视频图像为交通路段的场景,使用帧数为50帧.仿真结果如图2,3所示.仿真的硬件环境:Pentium E5700、内存2 G字节、主频3 GHz;软件环境:Windows XP,MATLAB R2009a.
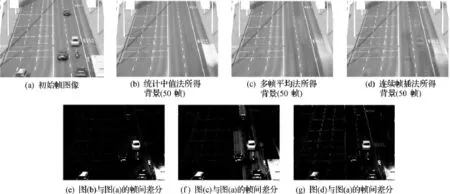
图2 三种常见背景提取方法仿真结果Fig.2 Simulation result of the three popular background extraction methods

图3 小波变换与多帧平均法融合的背景提取仿真结果Fig.3 Wavelet transform fuse multi-frame averaging method for background extraction
5 结 论
对三种常用的视频背景提取算法进行仿真分析,选择多帧平均法提取背景图像.在此基础上,利用小波变换,将提取到的背景图像进行一级小波分解,得到各分量图像.对水平分量及竖直分量进行去噪处理后采用小波重构得到最终的背景图像.再进行背景差分法,将运动车辆检测出来.实验仿真表明:对提取的图片进行小波变换及去噪处理,并没有增加算法复杂性,却能有效地减少其他背景提取算法提取出的背景图像中存在运动车辆轨迹的缺点.对得到的背景差图像,可以利用形态学图像处理,最终分离出运动车辆,为运动车辆车速的检测打好基础.图像处理研究中,小波变换常用于图像压缩与恢复、图像增强及去噪等.将小波变换与多帧平均法进行融合并应用于交通视频背景提取中,去除由于多帧平均法引起的噪声,大大扩展了小波变换在视频图像处理中的应用.
[1] DECARLO D,METAXAS D.Optical flow constraints on deformable models with applications to face tracking[J].International Journal of Computer Vision,2000,38:99-127.
[2] DAILEY D J,CATHEY F W,PUMRIN S.An algorithm to estimate mean traffic speed using uncalibrated cameras[J]. IEEE Transactions on Intelligent Transportation Systems,2000,1(2):98-107.
[3] GONZALEZ R C,WOODS R E.Digital image processing[M].London:Prentice Hall,2007.
[4] YONG Fan.A real-time algorithm of dynamic background extraction in image sequence[C]//Proceedings 4th IEEE International Conference on Machine Learning and Cybernetics.New York:IEEE Press,2005:4997-5000.
[5] ROSTAMIANFAR O,JANABI-SHARIFI F,HASSANZADEH I.Visual tracking system for dense traffic intersections[C]//Proceedings of Electrical and Computer Engineering. New York:IEEE Press,2006:2000-2004.
[6] GUPTE S,MASOUD O,MARTIN R,et al.Detection and classification of vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2002,3(1):37-47.
[7] WU Bing-fei,JUANG J H,TSAI P T.A new vehicle detection approach in traffic jam conditions[C]//IEEE Symposium on Computational Intelligence in Image and Signal Processing(CIISP 2007).New York:IEEE Press,2007:139-145.
[8] 杨高波,杜青松.MATLAB图像/视频处理应用及实例[M].1版.北京:电子工业出版社,2010.
[9] 曲丽丹.交通视频监控中的背景提取与运动跟踪方法研究[D].黑龙江:哈尔滨工业大学,2011.
(责任编辑:刘 岩)
Background extraction method based on the fusion of wavelet transform and multi-frame average
PENG Hong1,HAN Lu-sha1,WANG Hui2,FU Zhong2
(1.College of Information Engineering,Zhejiang University of Technology,Hangzhou 310032,China;2.Enjoyor Labs,Enjoyor Co.,Ltd.,Hangzhou 310030,China)
Using virtual detection loop method to deal with road traffic video,the speed of moving vehicles can be detected.But the virtual detection loop method needs accurate background image of road video firstly.Based on simulation analysis on background extraction algorithms,we use wavelet transform to extract the background image in order to get each component image. Through denoising the horizontal component,the vertical component and the angular component,these components are used to reconstruceted the final background image by wavelet transform. This method can effectively reduce the shortcomings with moving vehicle trajectory in the reconstructed background image,which exist in those main background extraction methods.
background extraction;wavelet transform;image denoising;moving target detection
TP391
A
1006-4303(2013)02-0228-04
2012-10-22
浙江省重点科技创新团队项目(2012R10011-03)
彭 宏(1970-),女,湖北武汉人,副教授,研究方向为多媒体数字通信和通信信号处理,E-mail:ph@zjut.edu.cn.
