机载激光扫描与航空影像的融合分类与精度分析
2013-05-10程效军管海燕
谢 瑞,程效军,管海燕
(1.同济大学 测绘与地理信息学院,上海 200092;2.河南工程学院 土木工程系,河南 郑州 451191;3.滑铁卢大学 地理与环境管理学院,加拿大 滑铁卢 N2L3G1)
近年来,机载激光扫描(LiDAR)得到了迅速的发展,作为一种新的空间信息获取模式,LiDAR在快速数据采集、三维建模等方面得到了广泛的应用,但它难以直接获得物体表面的语义信息,在数据后处理上还有许多问题亟待研究[1],如激光扫描数据的分类、地物识别和提取等.与LiDAR数据相比,航空遥感影像提供了大量丰富的空间、纹理等语义信息,但获取的主要是建筑物的顶面信息.各种数据源都有其自身的优势和局限性,单纯利用一种数据源进行分类和地物的识别提取其精度都有所限制,将多源数据融合以弥补单一数据源的局限性是一个非常重要的研究方向[2],许多学者对其进行了研究[3-6].实践证明数据融合是一种有效可行的地物分类方法[7].
目前的遥感影像分类主要采用面向对象或基于单像元的分类,基于面向对象的方法由于受影像分割尺度的影响,会产生类似“混合像元”的对象出现,降低了分类精度;基于单像元的方法从整幅影像入手,逐像元进行数据统计,工作量较大.针对这种情况,本文提出了基于面向对象和单像元的融合航空遥感影像与LiDAR数据的复杂城区多级自动化分类.
1 实验数据
实验位置.曼海姆,德国西南部,位于莱茵河与和内卡河的交汇处,中心区域街道呈格网状分布,是曼海姆独有的城市景观.测区为典型城市地区地貌,地物复杂、丰富,包含大量各式建筑物,比较密集,地形略有起伏,高程大约89.83~159.71m,树木和草地主要分布在建筑物间的空隙处和道路两侧.
数据源.①LiDAR数据,由TopoSys公司采用基于光纤扫描方式的FalconⅡ传感器于2004年采集,航高约1 200m,平均点密度和点间距分别为4点·m-2和0.5m,共192 700个点.LiDAR数据记录首末次回波信息和激光脉冲的强度信息(图1),图中像素灰度值与高差呈正比,越亮的区域表示高程值越大.② 真彩色正射影像数据的地面分辨率为0.5m·像素-1(图2).③ 假彩色近红外正射影像数据由近红外、红色和绿色3个波段组成,植被表现为红色调(图3图例所示色调均为植被),地面分辨率为0.5m·像素-1.

图1 激光扫描数据Fig.1 Laser scanning data
2 分类方法
在现实世界里,地物主要分为人工地物与自然地物,人工地物包括建筑物、桥梁、铁路、道路等;自然地物指树木、草地、河流等.本文将尝试利用上述多源数据融合,实现建筑物、树木、草地和道路的自动分类.

2.1 分类流程
本文的地物分类主要是基于以下5种信息进行,如图4所示.
信息1:滤波.对激光点云的末次回波进行滤波处理,初步判断为地面点与非地面点.
信息2:差分数字地面表面模型(DTM).计算LiDAR首末回波高差信息,判断是否为树木.
信息3:假彩色近红外影像红色分量.分析影像中的植被信息,提取红色分量.
信息4:直线特征.对真彩色航空影像提取建筑物的直线信息.
信息5:同质区域影像分割.将融合影像分割成同质区域块,每个区域块作为单个对象,进行面向对象的地物分类.
2.2 融合距离影像的航空影像分割
面向对象的分类方法能够较好地解决基于像素的高分辨率遥感影像分类结果中存在的“椒盐效应”,该方法是基于基元或单元的遥感影像信息提取技术,基于一定的同质性标准通过影像分割来获得基元[8],形成影像对象层,然后采用模型成员函数分类器来分类.为了提高航空影像分割精度,首先将点云距离影像(图1a)与真彩色航空影像(图2)采用比值变换融合(Brovey),该方法能充分保留每个像素的相关光谱特征,然后对融合后的影像进行分割.融合后的影像(图5a)包含LiDAR数据的高程信息,与图2相比,树木、建筑物、草地与道路等地表信息轮廓能清晰地区别出来,其光谱特征、形状特征表现明显,由此可以简化影像分割的难度,提高影像分割的正确性.
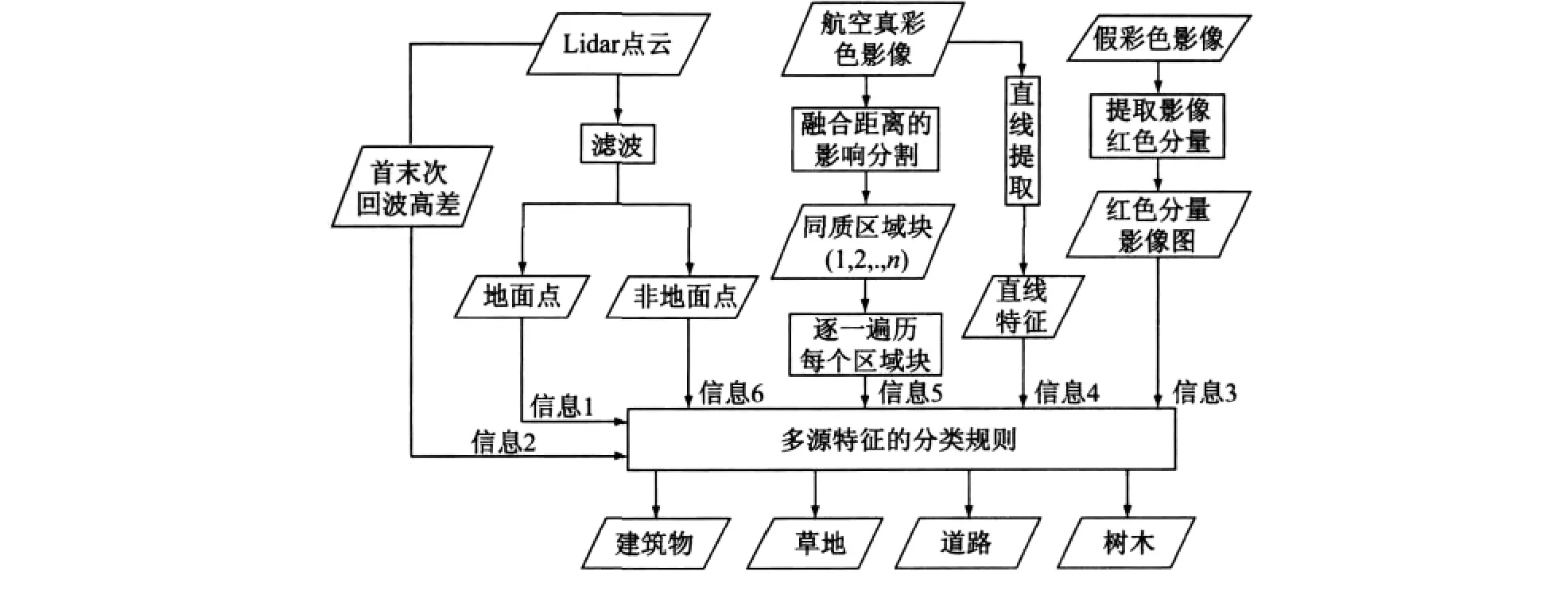
图4 分类信息Fig.4 Flow diagram of species classification procedure
分割尺度决定了分割对象所允许的最大异质程度,分割尺度越大,同质区域面积越大,异质区域数量越少,最适宜的分割尺度是分割后的多边形能将地物类型的边界表示清楚,即能用一个或几个同质对象表示出这种地物.一般情况下,在影像分割时光谱是最重要的特征,但是过分依赖光谱信息会产生大量破碎区域,一定权重的形状特征可以提高对象提取的精度,它表达的是对象在空间上的一致性,使分割对象达到边界光滑或者形状紧凑的目的,在很大程度上能避免过度分割.大多分割算法未能整合光谱信息和空间信息,本文分割尺度参数选择光谱异质性和形状异质性(式(1)),将融合后影像具有的明显的空间特征考虑在内.分割尺度等级定义为0~250,经过实验,本文选择35,光谱权重0.6,光谱异质性由合并前后对象的各波段的灰度标准差决定,形状权重0.4,形状异质性由合并前后对象的周长和外接矩形边长决定,图5b为分割结果.

式中:wc表示光谱权重;hc表示光谱异质性;ws表示形状权重;hs表示形状异质性.
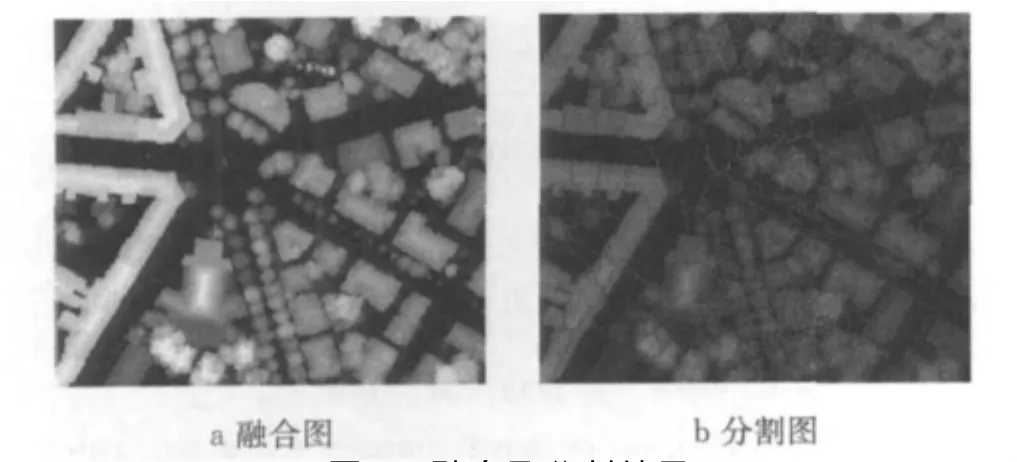
图5 融合及分割结果Fig.5 Merge-image and segmentation result
比较图5,基本上达到了最适宜分割尺度,树木被独立分割,建筑物和道路这两类地物被分割成少数几个对象,分割边缘明确;只有中心区域的圆形地物被分割破碎(从图2和图3可以明显看出这一地物类型),主要是因为融合后其光谱信息与道路光谱信息相近;道路上的车辆与道路大部分被划分到同一图斑,只有少数单独存在,其原因在于分割尺度的设置,如果设置小的尺度则会分离开,但势必造成其他地物类型过多的琐碎图斑,给后续分类处理带来不便.图6是采用同样的参数对图2的分割结果,融合LiDAR数据的航空影像在分割时,确实能改善分割效果.

图6 航空影像分割结果Fig.6 Segmentation of true-color ortho-image
2.3 基于高程差阈值的三角网迭代滤波
从激光脚点数据点云中提取数字高程模型,需要将其中的地物数据点去掉,就是所谓的激光扫描数据的滤波[9].就滤波的实质意义来讲,滤波也是一种分类,滤波后能区分地面点和非地面点.
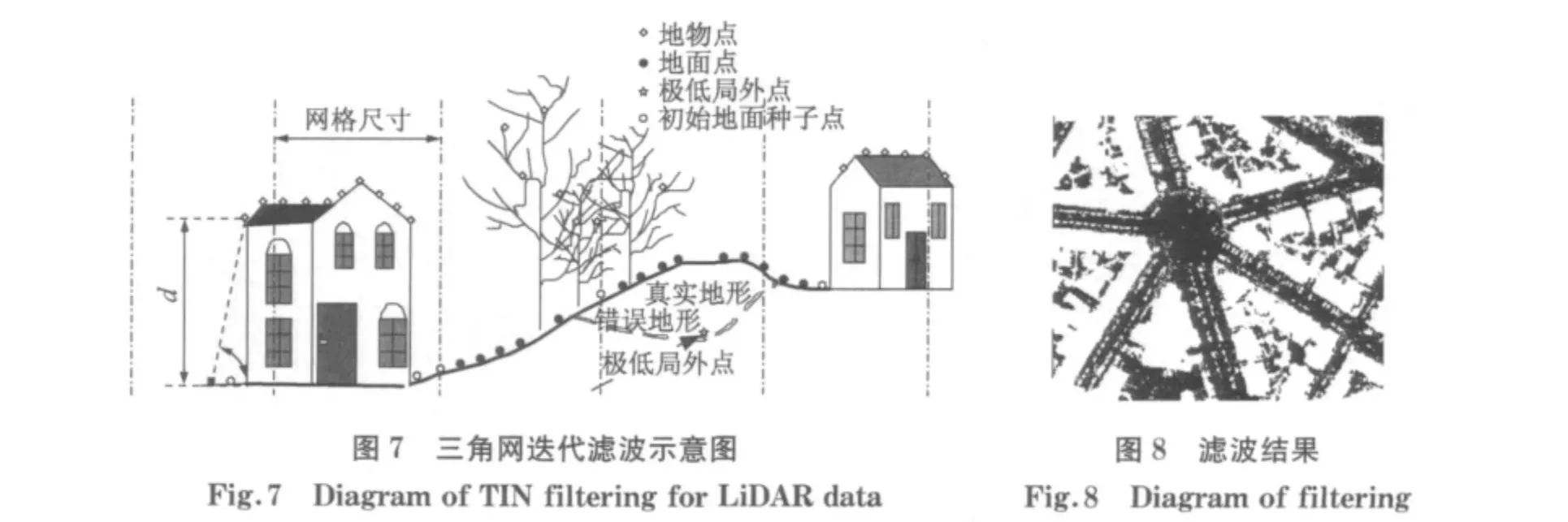
本文实验区域为建筑物密度较大的城区,采用基于高程差阈值的自适应TIN(不规则三角网)模型滤波算法,首先去除噪音点,然后用少量种子点建立稀疏的TIN,最后根据高差阈值参数通过迭代对TIN不断加密.具体步骤如下:
(1)去除极低局外点.在滤波前需要对LiDAR预处理,去除极低局外点,避免构建错误的DEM.在复杂城区,地铁站的入口、窨井以及口径较小的深坑等,其高程值明显低于其他地面点,这类极低局外点对初始地面种子点的选取会产生很大的影响,极低局外点附近的地形会发生沉降,如图7虚线所示区域.
极低局外点的去除采用近邻域的方法,近邻域的搜索采用将激光点云数据分块的方法并构建3维KD树(K维搜索树,其构建过程采用文献[10]的方法,对空间点云按坐标轴方向进行3次分割),计算块内点高程的平均值,对平均值以下的点,给定搜索半径R(大于地面分辨率的2倍以上),统计该点在半径R内的点个数,如果点个数小于给定阈值,则认为该点是极低局外点.极低局外点一般只有少数几个.
(2)根据给定格网大小分别在x,y方向划分规则格网,从每个格网中选取高程最低的激光点(图7中地表上的虚点)作为初始地面种子点加入到不规则三角网(TIN)中,构成初始DEM.
初始DEM的质量与格网有关,格网过大或过小,地物点的尺寸都不能被正确估计.在城区较大尺寸的独立地物点一般是建筑物,如果格网小于激光点云中建筑物的大小,则会将建筑物的地物点作为地面点加入到初始TIN中,因此格网应该大于激光点云数据中最大建筑尺寸,然而最大建筑物的尺寸往往无法正确估计.针对这种情况,为了降低最大建筑物尺寸对种子点选取的影响,对所选出来的种子点及其邻域3×3的窗口拟合参数平面(城区地形是连续且平缓的,并在较小范围内可以近似地认为地面为平面),根据区域的地形坡度阈值(本文选择小于5°)作为约束条件将残差大的点从种子点中去除.
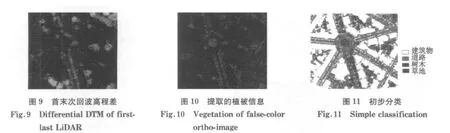
(3)遍历TIN,计算投影到三角形中每个激光点至三角形的距离d,如果小于给定的高差阈值(本文选择0.8~1.2m)则认为该点是地面点,直至将TIN中所有的三角形遍历后,将获得的地面点重新加入TIN.重复迭代,直至满足给定的迭代最大次数或者迭代搜索获取的地面点小于给定的最少地面点.图8为激光点云末次回波的滤波结果,白色表示地物点,黑色表示地面点.
2.4 基于多源特征的初始分类
LiDAR数据包含首末两次回波信息,根据信息2得到激光点云首末回波高程差(图9),像素灰度值与高差值呈正比,越亮的点表示高程差越大.利用绿色植被对近红外的强烈反射使得在影像上呈红色这一特性(图3图例所示色调),根据信息3提取假彩色影像中的植被信息(图10).
目前具有3个信息源:2.3节滤波后产生的地面点与地物点信息SF、首末次回波的高差信息SD、假彩色影像中提取的红色信息SR.考察影像分割后每个对象内所含的SF,SD和SR,如果该对象满足划分为某一类的准则,则将对象区域内所有像素划分为此类中.将SF,SD和SR量化,分别为F1,F2与F3.
F1=T/P,表示区域内地面点所占百分比;F2=D/P,表示高差大于设定阈值点所占百分比;F3=R/P,表示内含有植被的红色信息所占百分比.其中P为区域内的像素总个数,T为区域内地面点个数,D为高差大于设定阈值的个数,R为区域内含有植被的红色信息像素个数.
通过训练样本获取具体分类规则(表1),比如就树木而言,激光点能够产生多次回波,局部高程信息变化较大;在假彩色影像上呈现红色,在分割对象内所含的该色调信息量也应该相当多.
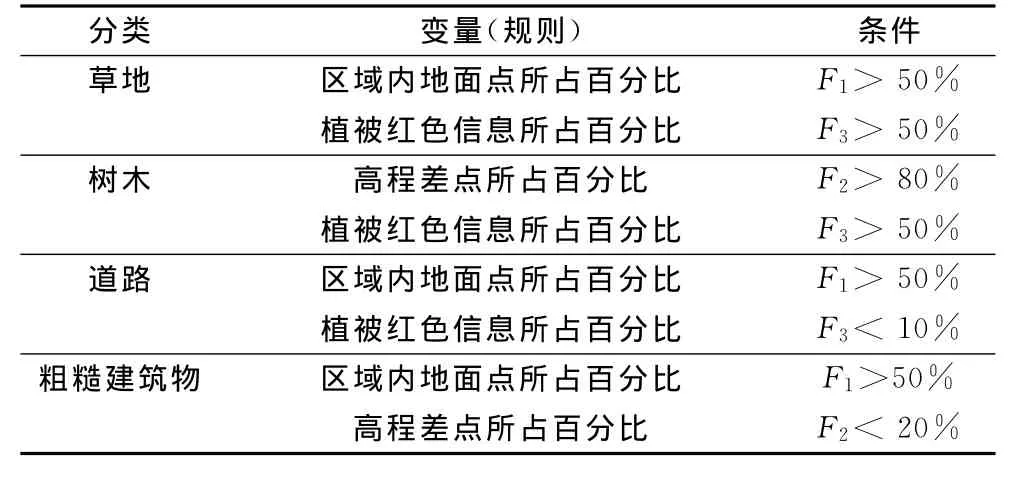
表1 多源特征分类规则Tab.1 Classification on multi-sources feature of rules
根据表1的分类规则,可以得出一个初始分类结果,但分割对象内存在一个同质图斑包含多种地物类型的情况存在(与分割尺度有关),类似于混合像元的现象,如中心区域圆环内的植被,按上述规则会造成误分类.针对这种情况,将植被信息、高差信息与分类结果进行叠加(假设提取的植被信息、高程差信息均正确),再对植被信息逐像元判断,将分类错误的植被像元重新定义,且利用高差信息区分草地和树木(草地高差定义小于1m,树木高差大于等于1m).
与道路分割在同一图斑的车辆,在满足表1提出的分类规则时被定义为道路,不满足条件的由于车辆是非地面点,会被定义为建筑物.另外,分割过程中还存在单独的车辆图斑,而道路上的车辆和建筑物高差信息不会发生变化,此类对象在这一步也被误分为建筑物,需要进一步处理.
图11为分类结果,其中白色为粗糙分类的建筑物,即包含错误分类在内.
2.5 精化分类
通常情况下,建筑物具有规则形状,包含很多直线信息,可以通过提取直线,统计分割对象内含有直线段的数量进一步分类建筑物.当线段数量大于等于2时,如果分类结果不是建筑物,则将其定义为建筑物.直线段提取采用Canny算子对真彩色航空影像处理,Canny算子采用高、低两个阈值,并对提取结果进行“非极大抑制”和形态学连接操作,它提取的建筑物直线信息外围轮廓线比较完整,见图12.在这个过程中设置简单的长度阈值(本文定义小于2 m),去除小的断裂线.最终分类结果如图13所示.
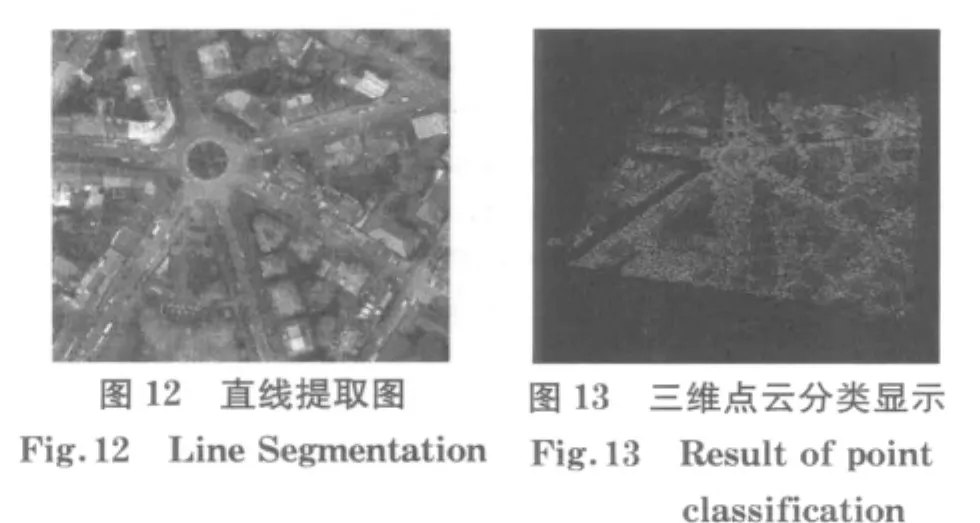
3 实验精度与分析
为了准确地评价分类精度(或误差),本文将融合分类结果、单个影像分类结果与人工分类结果进行比较,图14是单影像数据分类结果(本文采用假彩色影像监督分类),图15是人工分类结果并将此作为参考信息,建立3种分类结果的统计信息(表2)和融合分类与人工分类的混淆矩阵(表3).
从表2可以看出,单影像分类中建筑物与道路分类存在较大的误差,道路上的车辆、中心环形区域的边界都被归类为建筑物,使得其数量大量增加,而道路数量减少,另外道路两侧行树的遮挡也是造成道路数量减少的原因之一.从图13可以明显看出,单影像分类存在过多的分类错误,而在融合分类中这一错误分类现象得到明显改善(图13),比如建筑物分类数量得到控制.但树木与道路数量存在一定误差.
从表3可知,树木的制图精度较低,为75.75%,这主要是由于有较多的像元被漏分为道路.草地的用户精度最低,为71.20%,有较多的道路像元被错误地归为这一类;道路的精度为82.58%,有较多的树木像元被错误地归为这一类.树木、草地和道路三者之间易发生混淆;树木与草地均属于植被,而植被信息主要来源于假彩色近红外影像中植被的光谱特性和LiDAR点云首末次回波的高程差,由于植被光谱的差异使得有些植被在假彩色近红外影像上不能用全局阈值提取出来而造成植被的漏分,而本文在定义这两个类别时是以该结果完全正确为前提的.建筑物的分类结果即使利用直线段数量进行纠正,但是由于城区的复杂,仍然会存在错误,如道路上静止不动的大型巴士,它的高差信息不会改变,在顶部面积、高度、直线段数量等方面与建筑物有些类似,又由于融合影像后,光谱信息有所改变,所以单从几何表现上是不能将其与建筑物分开的,如果能引入语义特征,则分类精度将会进一步提高.另外,由于实验区域为城区,地面状况较为复杂,人工分类的精度也会影响对分类结果的分析.
制图精度为分类正确的像素个数与实际像素个数的比值;用户精度为分类正确的像素个数与分类像素个数的比值;分类精度为全部分类正确的像素个数与实际全部像素个数的比值.整体上看,建筑物的制图精度和用户精度分别为92.53%和95.79%,对用户而言是比较可靠的,说明LiDAR数据提供的高程信息在参与建筑物信息提取时是非常有效的.整个区域的分类精度为89.62%.
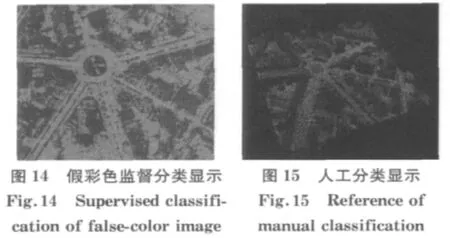
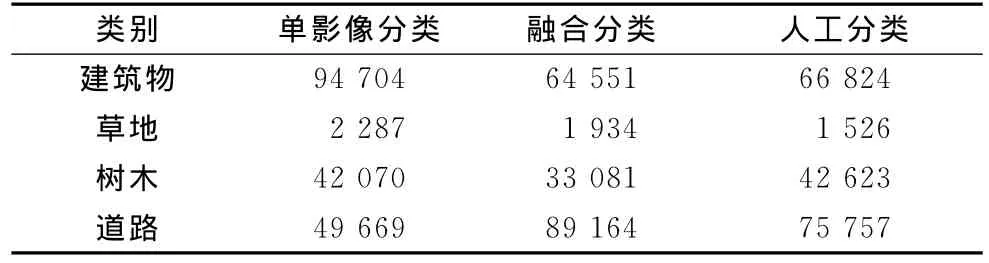
表2 3种方法分类结果统计表Tab.2 statistics of different classification results像素
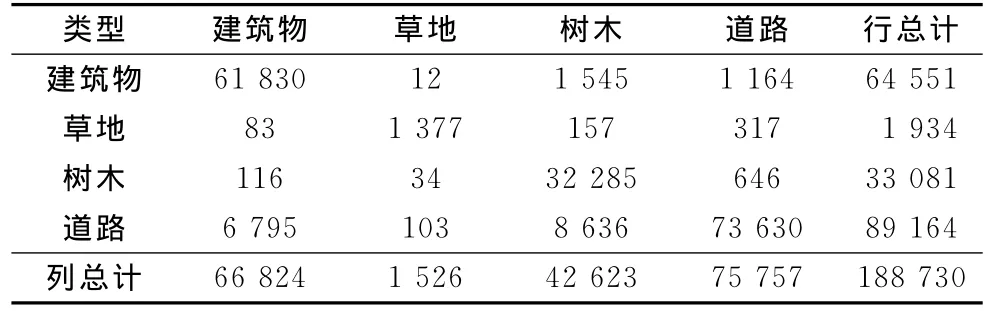
表3 分类混淆矩阵表Tab.3 Confusion matrix of classification像素
4 结 语
本文综合利用LiDAR数据提供的高程信息、真彩色正射影像与假彩色近红外正射影像提供的丰富的光谱及纹理信息,将点云数据与航空影像融合,利用影像的光谱特征和空间特征对其进行分割,采用基于面向对象与单像元分类相结合的方法,进行了建筑物、树木、草地和道路4类地物的提取.首先在给定的分类决策条件下,确认每个同质分割对象的类别归属,并将分类结果与植被红色分量、高程差叠加,实现基于像元的树木和草地在上述分类中错误类别的更改,实现多源数据的二级分类;然后利用建筑物具有规则形状的特点,在分类结果中加入直线信息,进一步改善分类结果,实现了多源数据的第三级精化分类.该方法能够有效区分建筑物、树木、草地和道路4类地物.
实验仅实现了4种地物的提取,在具有复杂景观的城市区域可能需要更详细的地物类别.本文地物分类的基础是单尺度的影像分割,如果在分割过程中针对不同的地物类型,采用不同尺度的分割参数,即多尺度分割,尽量避免混合图斑对象的出现,分类结果将会有所改善.另外,建筑物直线段特征是基于航空影像提取的,而基于LiDAR数据的建筑物直线段提取对分类结果的影响程度有多大有待进一步研究.
LiDAR技术是近年来迅速发展起来的新技术,遥感影像的空间分辨率也越来越高,它们的应用也越来越多,现在利用这些数据进行单一地物提取的方法越来越多,越来越成熟,如何在地物分类时集成这些方法,集成多源数据,提取更多的分类信息,自动分离出更多类别的地物,且使分类结果具有更高的精度等问题将在此基础上进行下一步研究.
[1] 吴杭彬.融合航空影像的机载激光扫描数据分类与特征提取[D].上海:同济大学测绘与地理信息学院,2010.
WU Hangbin.Classification and feature extraction of airborne LiDAR data fused with aerial image[D].Shanghai:College of Surveying and Geo-Informatics of Tongji University,2010.
[2] Dowman I.Integration of LiDAR and IFSAR for mapping[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,35(Part B2):90.
[3] Sohn G,Dowman I.Data fusion of high-resolution satellite imagery and LiDAR data for automatic building extraction[J].ISPRS Journal of Photogrammetry &Remote Sensing,2007,62:43.
[4] CHEN Yunhao,SU Wei,LI Jing,et al.Hierarchical object oriented classification using very high resolution imagery and LiDAR data over urban areas[J].Advances in Space Research,2009,43:1101.
[5] CHEN Lei,ZHAO Shuhe,HAN Wenquan,et al.Building detection in an urban area using LiDAR data and QuickBird imagery[J].International Journal of Remote Sensing,2012,33(16):5135.
[6] Guo L,Chehata N,Mallet C,et al.Relevance of airborne lidar and multispectral image data for urban scene classification using Random Forests[J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66:56.
[7] Puttonen E,Suomalainen J,Hakala T,et al.Tree species classification from fused active hyperspectral reflectance and LIDAR measurements[J].Forest Ecology and Management,2010,260:1843.
[8] 苏伟,李京,陈云浩,等.基于多尺度影像分割的面向对象城市土地覆被分类研究[J].遥感学报,2007,11(4):521.
SU Wei,LI jing,CHEN Yunhao,et al.Object-oriented urban land-cover classification of multi-scale image segmentation method[J].Journal of Remote Sensing,2007,11(4):521.[9] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
ZHANG Xiaohong.Theory and methods of airborne LiDAR measurement technology[M].Wuhan:Wuhan University Press,2007.
[10] 施贵刚.地面三维激光扫描数据处理技术及作业方法的研究[D].上海:同济大学测绘与地理信息学院,2009.
SHI Guigang.Research on terrestrial 3D laser scanning data processing technology and operation method[D].Shanghai:College of Surveying and Geo-Informatics of Tongji University,2009.
