SEPIC变换器模糊自适应PID控制参数算法研究
2013-04-28张鹰高嵬赵淑琴
张鹰,高嵬,赵淑琴
SEPIC变换器模糊自适应PID控制参数算法研究
张鹰1,高嵬2,赵淑琴3
(1. 海军驻438厂军事代表室, 武汉 430060;2. 海军工程大学电气工程学院, 武汉 430033;3. 中国舰船研究设计中心, 武汉 430064)
模糊自适应PID控制已经在各类电力电子装置中得到普遍应用,可以实现对PID参数的最佳调整。目前该控制方法已应用于Buck和Boost直流变换器上,在理论和实践应用上都取得良好效果。本文以Sepic变换器为研究对象,将模糊自适应PID控制方法应用于此型变换器上,通过对整定规则的理论分析和仿真研究,进而得出了模糊自适应PID控制方法的仿真效果。
Sepic变换器 模糊自适应PID控制 参数整定 算法
0 概述
模糊自适应PID控制就是运用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规则及有关信息作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况,运用模糊推理,既可自动实现对PID参数的最佳调整。
在国内外,已经有很多学者将模糊自适应PID控制应用于直流变换器上,无论理论上的分析和研究,还是实践上的应用与实现,都得到了良好的效果[1-4]。
1 模糊控制的基本原理和原则
1.1 基本原理
模糊自适应PID控制器的结构如图1所示,其中rin为系统输入,yout为系统输出,error为系统输入与输出的差,ec为误差的变化率。
设PID控制器的输出量为u(t),输入量为e(t),它们的关系为:

式中K为比例增益,K为积分增益,K为微分增益。模糊自适应参数整定就是寻求该三个参数与e、ec之间的关系。
1.2 基本原则
通过多次操作经验总结结合理论分析可以归纳出偏差e、偏差变化率ec跟PID调节器的三个参数KKK间,存在如下关系。
(1)当ê()ê较大时,为加快系统响应速度,应取较大的K,这样可以使系统的时间常数和阻尼系数减小。当然不得过大,否则会导致系统不稳定;为避免系统在开始时可能引起的超范围控制作用,应取较小的K,以便加快系统响应;为避免出现较大的超调,可以去掉积分作用,取K=0。
(2)当ê()处于中等大小时,应取较小的K,使系统响应的超调略小一点;此时K的取值对系统较为关键,为保证系统的响应速度,K的取值要恰当;此时可适当增加一点K,但不得过大。
(3)当ê()较小时,为使系统具有良好的稳态性能,可取较大的K ,K;为避免系统在平衡点出现震荡,K的取值应恰当。
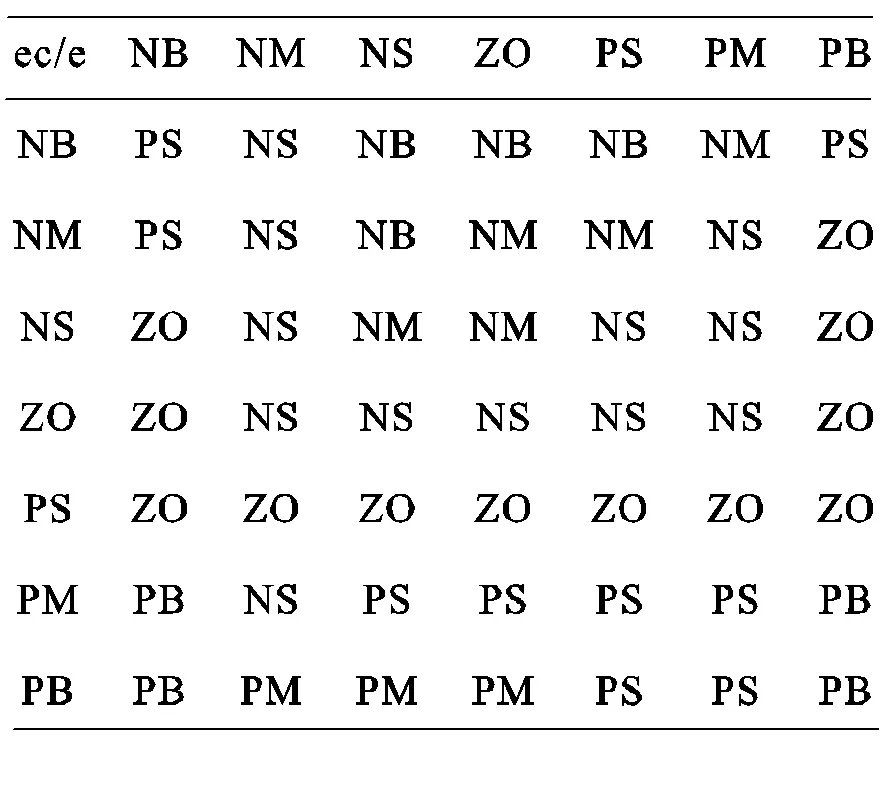
下面得到PID调节器三个参数的模糊控制表。其中,NB、NM、NS、ZO、PS、PM、PB分别表示负大、负中、负小、零、正小、正中、正大。
2 工作流程和仿真分析
2.1 工作流程
将系统误差和误差变化率变化范围定义模糊集上的论域:

其模糊子集为
设和KKK均服从正态分布,因此可导出各模糊子集的隶属度,根据各子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数代入下式计算:
(2)
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正,其工作流程如图2所示。

2.2 仿真分析
根据模糊控制表设计出49条模糊规则,运用MATLAB的模糊推理系统可以得到模糊自适应PID控制中的三个参数KKK与和之间的关系如图3、4、5所示[5]。

图3 输出量KP曲面观测窗

图4 输出量KI曲面观测窗
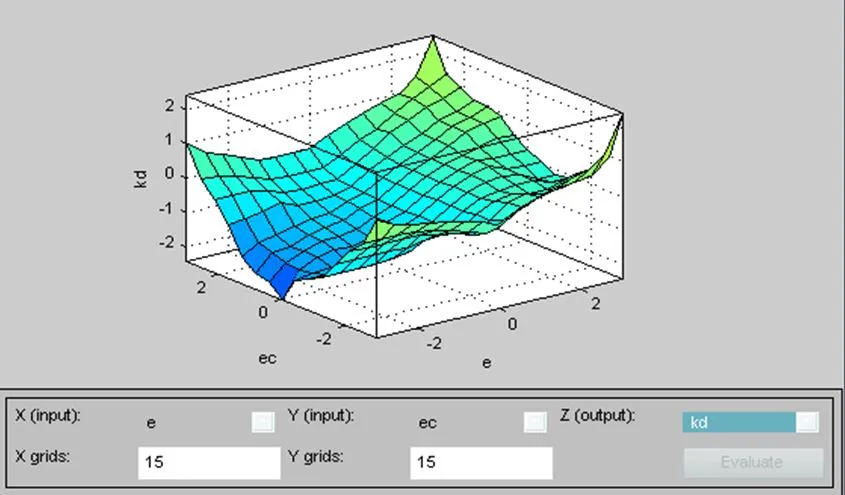
图5 输出量KD曲面观测窗
跟据[6]所求得的SEPIC变换器的传递函数,在宽幅压320 -180 V条件下,选用输入电压为220 V,占空比为0.5,可得此时的传递函数为下式,经仿真可得,系统的BODE图为图6所示[7]。
对于一个稳定的电压可调系统,其增益裕量应大于6 dB,相角裕量应大于45°[8],而该系统的相角稳定裕量仅为=2.236°。因此,可以采用PID控制器来提高系统的稳定性,其传递函数为

令K=1,K=0.001,K=0.03,补偿后的相角裕量约为890,增加了系统的稳定性。
表1 K模糊规则表
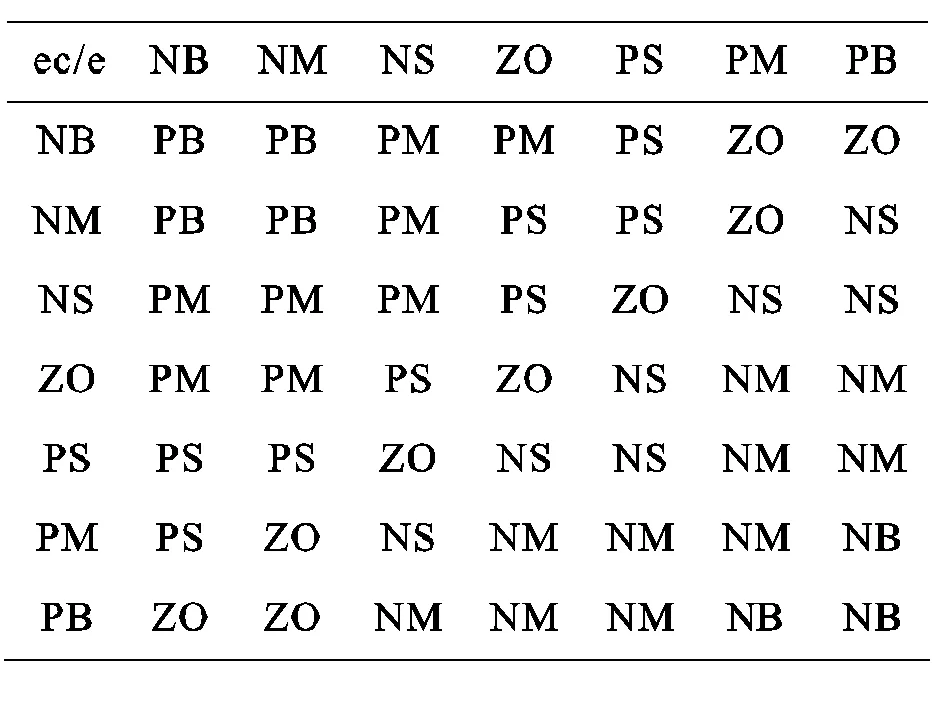
表2 K模糊控制表
表3 K模糊控制表
3 结论
针对宽幅压工况下的输入电压扰动以及SEPIC电路自身的强非线性特点,本文尝试性地将模糊自适应PID控制运用到SEPIC变换器上,经过仿真,得到了理想的效果。
[1] 王宝瑛,朱方明,曹秉刚等.电动汽车用DC/DC变换器模糊自整定PI控制[J].电力电子技术,2007,41(1),48-50.
[2] 任碧莹,余健明,同向前等.混合式自调整模糊控制在DC/DC变换器中的应用[J].电力电子技术,2001,35(6),23-25.
[3] Arnaldo M,Miguel S. SEPIC type DC-DC converter fuzzy model[C].ICROS -SICE International Joint Conference,Japan:Fukuoka International Congress Center,2009:891-895.
[4] 许会军,王萍.移相全桥变换器的模糊PID预测控制[J].计算机仿真,2007,24(1):246-249.
[5] 石辛民,郝整清.模糊控制机及其MATLAB仿真[M].北京:清华大学出版社,北京交通大学出版社,2008,151-180.
[6] 孙心丰. 基于宽幅压的ZCZVT-PWM SEPIC变换器研究[D]. 武汉:海军工程大学学位论文,2010.
[7] 夏玮,李朝辉,常春藤等.控制系统仿真与实例详解[M].北京:人民邮电出版社,2008,241-243.
[8] 王萍,辛爱芹,邹宇.高性能模糊PID控制DC/DC变换器[J].电力电子技术,2007,41(8):102-103.
Parameter Adjustment Rules and Algorithm of Fuzzy Self-adaptive PID Controlling on Sepic Converter
Zhang Ying1, Gao Wei2, Zhao Shuqin3
(1. The Naval Delegation Office in No.438 Factory, Wuhna 430060, Hubei, China; 2. The Electricity Engineering School in NUE, Wuhan 430033, Hubei, China; 3. China Warships Research & Designing Centre, Wuhan 430064, Hubei, China)
TP273
A
1003-4862(2013)01-0025-03
2012-10-07
张 鹰(1960-),男,高级工程师。
研究方向:电气与自动控制。