用经纬仪和卡尺测量大长度滑轨定位误差的方法
2013-04-25陶子英高亢任顺清
陶子英,高亢,任顺清
(哈尔滨工业大学,黑龙江哈尔滨 150006)
0 引言
某一维机械滑轨可以作为目标仿真设备,模拟红外、射频等目标运动[1]。它的位移准确度要求较高,在5.5 m的范围内要求误差小于1 mm。在缺乏激光跟踪仪、双频激光干涉仪等昂贵检测设备的情况下,本文采用已有的经纬仪和卡尺对滑轨的位移误差进行测试。
1 测量原理
如图1所示,首先将卡尺固定在滑块上,调整卡尺的刻度表面使其与滑块的运动轨迹平行,将经纬仪置于滑轨前方的工作台面上,使经纬仪与尺等高。然后将水平仪放置在经纬仪的竖直轴系的轴端,调整经纬仪的地脚,当旋转经纬仪竖直轴时,使水平仪的读数变化达到最小,完成经纬仪的竖直轴线的铅垂度调整。最后将经纬仪的视准轴调整至水平转台,并对准卡尺。
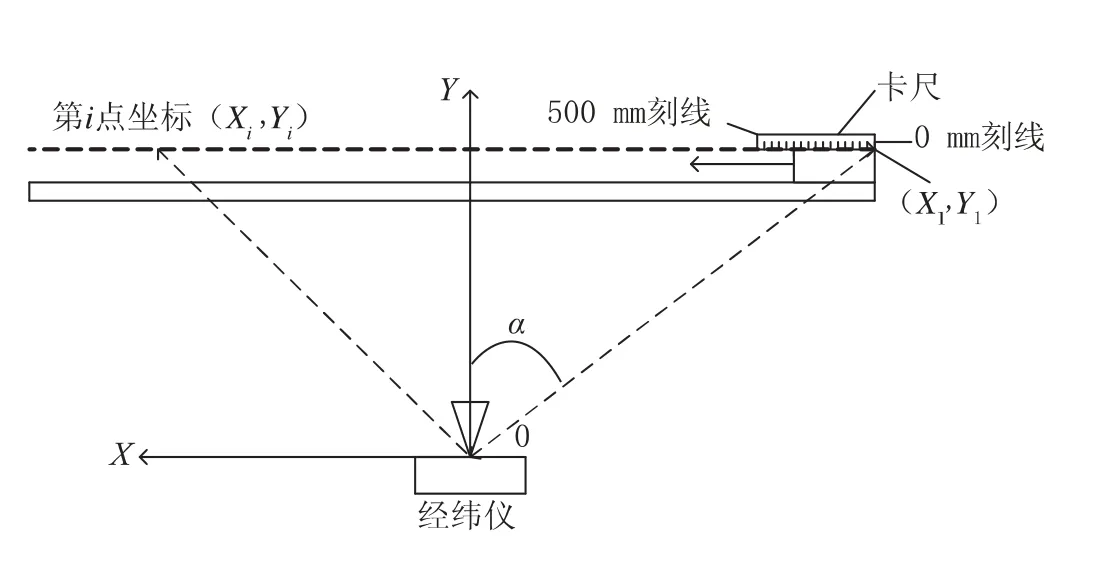
图1 滑轨与经纬仪、卡尺检测系统简化图
电机控制滑块每次行进500 mm,用经纬仪分别对准0 mm刻线和500 mm刻线,读出经纬仪的水平角。针对运动滑块的测试结果采用迭代最小二乘法辨识出经纬仪至卡尺刻线轨迹的位置参数,并计算出每次运行的位移误差[2]。
假设当经纬仪视准轴与滑块的运动方向垂直时,经纬仪的读数为α0,当滑块运行到i点时,经纬仪对准0 mm刻线时读数为αi,对准500 mm刻线时读数为βi。
理想情况下,βi=αi+1。如果βi≠αi+1,则表明每次移动的500 mm的距离有误差,此时误差为

式中:Xi是滑块运行到第i点的横坐标;Y1为经纬仪的三轴 (视准轴,水平轴,数值轴)交汇中心至卡尺刻线平面的距离。
如何准确确定Y1和α0?能否根据已测得的数据来辨识出呢?下面我们讨论它们的辨识方法[3]。
令测试第一点0 mm刻线的坐标为 (X1,Y1),若每次运行500 mm,则第i点的0 mm刻线的横坐标可以表示为

式中:p为要辨识的参数向量;ε为残差向量;m为已知滑块运行的次数。
我们可以设定代入初始值时Ф的值为Ф0,则第n次迭代Ф的值为Фn-1。同理,第n次迭代γ的值为γn-1,因此可以得到下式:
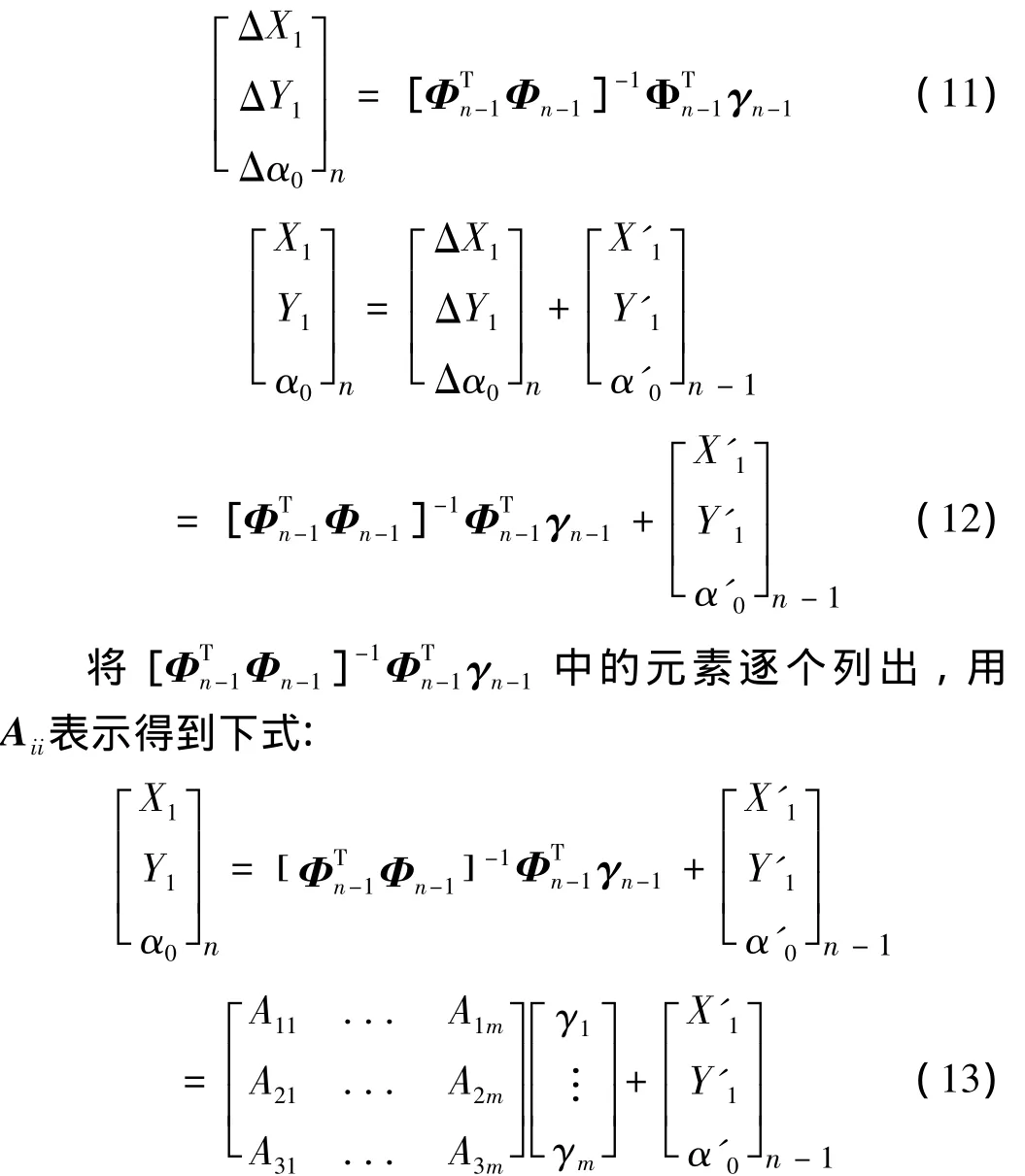
根据最小二乘法和给定的预估计可以辨识出ΔX1,ΔY1,Δα0,进而利用式 (12)求取X1,Y1以及α0,然后再利用式 (11)、式 (12)进行多次迭代直至ΔX1,ΔY1,Δα0小于给定的误差。
2 误差分析
误差分析包括两个部分。第一部分为所辨识的参数X1,Y1和α0的辨识准确度。第二部分为所测量的位移误差的测试不确定度[4]。
前面辨识了基本参数X1,Y1和α0,则滑块每次行进500 mm的误差为

2.1 参数辨识准确度
估计量X1,Y1和α0的不确定度可以根据式 (13)得出,

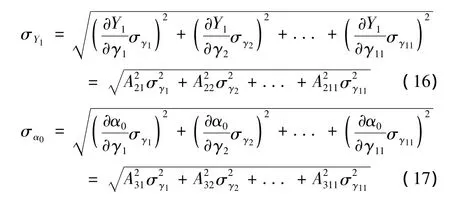
γi的不确定度主要由αi决定,所以由式 (8)得出γi的不确定度为

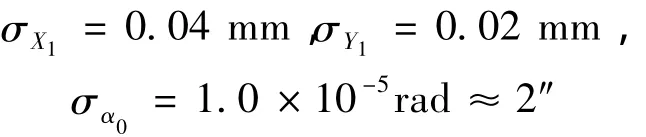
设定αi的不确定度为1″,滑轨的定位误差需求小于0.8 mm,代入上式,通过编程计算得到X1,Y1,α0的不确定度为
2.2 位移误差测试不确定度
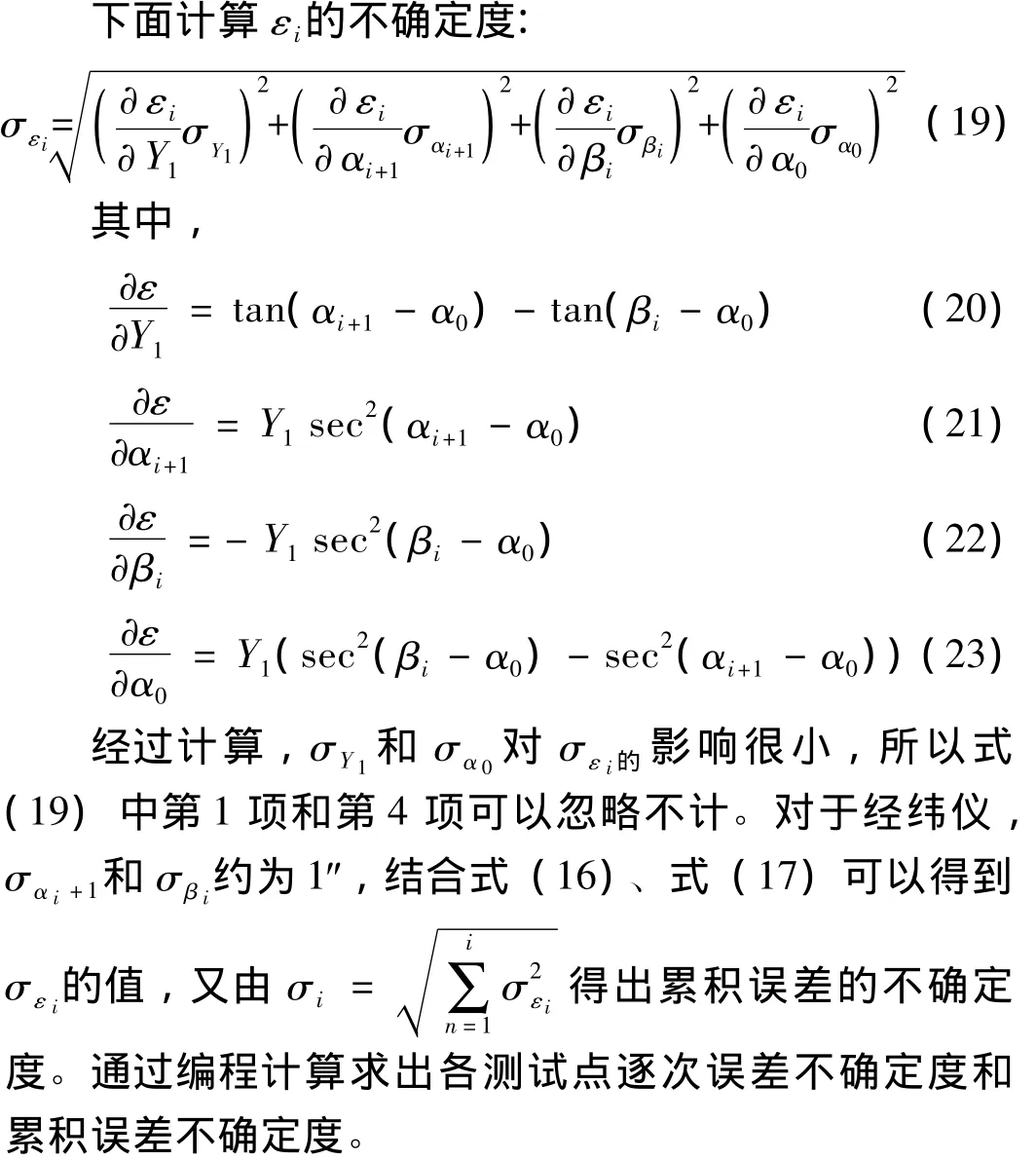
由公式可以看出,Y1和α0的辨识准确度对εi的测试准确度影响很小,X1的辨识准确度对εi的测试准确度无影响。经纬仪的准确度对εi的测试准确度影响最大,所以应尽量使用高准确度经纬仪[5]。
3 测试数据与结果
具体测试时,经纬仪的测量不确定度为1',滑轨的定位误差要求小于0.8 mm。测试的数据见表1。
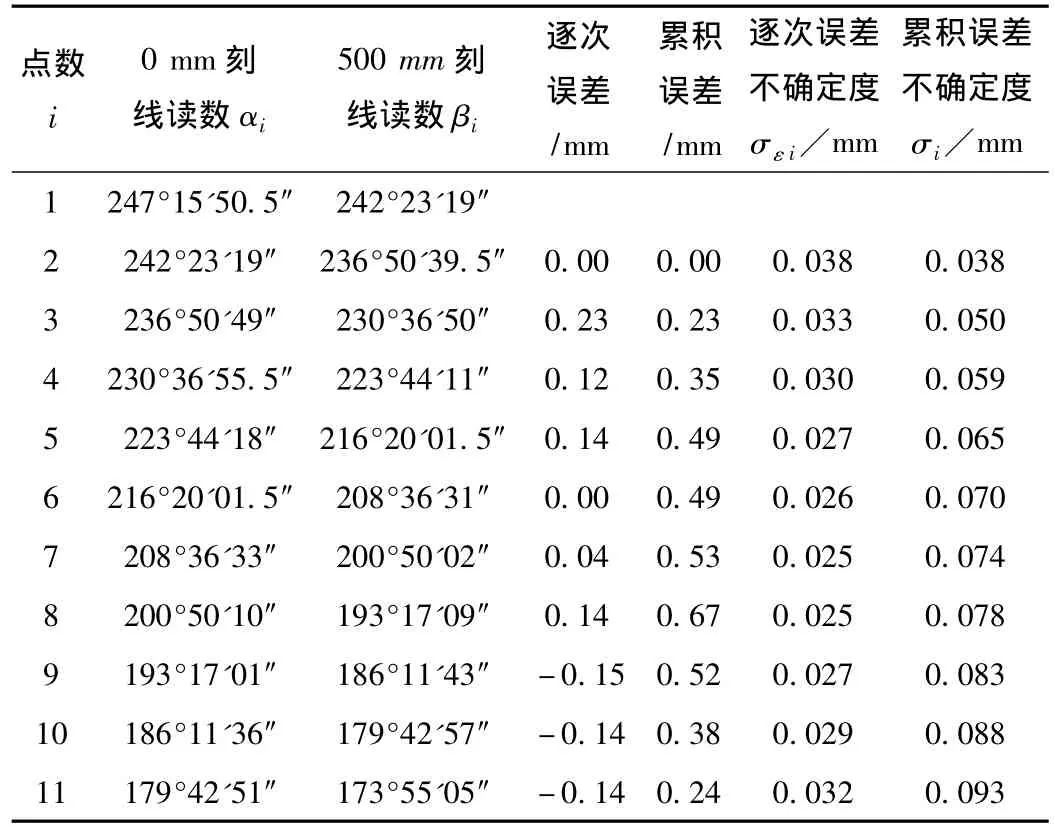
表1 滑轨的位移测试数据及位移误差与测试不确定度
根据表中的数据,最终得到的实验结果如下:X1=-3093.83 mm,Y1=3671.78 mm,α0=207°08'56 ″=207.1491°。最大定位误差为0.67mm,满足测量误差小于0.8mm的要求。
4 结论
本文针对运动滑块的测试结果采用迭代最小二乘法辨识出经纬仪至卡尺刻线轨迹的距离等参数,并计算每次运行的位移误差。误差分析与实验结果证明本文提出的方法能够达到测试精度的要求。
[1]任顺清,陈海兵,赵洪波.用经纬仪测量大尺寸三维导轨垂直度的方法 [J].仪器仪表学报,2012,33(1):188-193.
[2]费业泰.误差理论与数据处理[M].北京:机械工业出版社,2010.
[3]丁振良.误差理论与数据处理[M].哈尔滨:哈尔滨工业大学出版社,1992.
[4]BALSAMOA,MEDA A.Geometricalerror compensation of coordinate measuring systems [J].Nanotechnology and Precision Engineering,2006,4(2):83-91.
[5]ZHANG G X.A Method for fastmeasurement of squareness errors of CMM with renishaw check gauge [J].Journal of Tianjin University,2003,36(3):293-295.
