汽车防抱死制动性能台架测试技术
2013-04-24周凯王旭东焦文良谭天江张焱
周凯, 王旭东, 焦文良, 谭天江, 张焱
(哈尔滨理工大学汽车电子驱动控制与系统集成教育部工程研究中心,黑龙江哈尔滨150080)
0 引言
现代车辆性能的提升对制动系统提出了更高的要求,随之而来的问题就是如何对这些系统进行检测以确保其发挥最优性能。传统的检测方法大多采用实车路试,路试需要建造专门的跑道,费用高,测试周期长[1]。因此,台架测试方法已逐步取代了路试。
传统的实验台架可分为两种,平板式实验台和滚筒式实验台。平板式实验台属于惯性式实验台,其测力原理基于牛顿第二定律。只要保证水平制动力与垂直力测量装置的精确度,就可将汽车制动过程中制动力的变化如实检测出来。但平板式实验台存在一定的缺点:车辆驶入平板速度不易控制;可重复性精确度低;适用车型受到限制;对制动最低初速度有严格的要求,需要兼顾测试的安全性。滚筒式制动检测台是一种静态检测技术,测试时将整车置于滚筒之上。其缺点为:车轮与滚筒之间存在两个接触面,轮胎直径的不同会导致车轮受力情况不一致,直接影响测试结果。
这两种传统测试方法共同的劣势为:针对整车进行检测,需要具备较大规模的测试场地;当车轮在平板或滚筒上进行制动时,轮胎与接触面间的摩擦系数无法改变,而对不同路面进行测试时,需要对平板和滚筒的表面进行改装,因此摩擦系数的调整非常困难[2]。
本文所研究的台架测试方法正是对以上两点进行了创新设计。它针对防抱死制动系统进行独立测试,不需要整车参与,从而大大减小了设备占地面积;轮胎与路面间的摩擦系数通过磁粉离合器主从动轴间的滑差代替,励磁电流调节方便。既可以进行单一路面与对开路面测试,又能在制动过程中改变轮胎与路面间的附着系数,进行对接路面测试。
本测试方法除了对车辆制动性能进行评价外,更侧重于防抱死刹车系统(anti-lock braking system,ABS)控制算法的研究,可以针对一种控制器在相同测试条件下进行不同算法的控制性能对比,掌握制动稳定性及制动距离之间的差异,从而确定何种控制算法更适合此类车辆[3]。
1 系统设计及工作原理
1.1 机械结构设计
测试系统三维立体示意如图1所示。图中给出的是测试系统单轮结构。每个单轮结构中包含如下部件:制动盘、弹性联轴器、磁粉离合器、扭矩传感器、飞轮、轴承。除以上部件之外,还需要一些外部设备共同构成完整系统,外部设备主要有汽车制动系统、励磁电流控制器和电机驱动控制器。这里并没有使用真空助力设备,制动需要的踩踏力要比实际车辆略大,但不影响制动效果[4]。

图1 测试系统三维结构Fig.1 Three-dimensional structure of test system
整体测试系统由4部分结构相同的单轮试验台通过链条组合而成,由一个电动机提供全部动力。飞轮的主要功能是利用旋转产生的转动动能来模拟1/4实际车辆的平动动能;扭矩传感器用来测量飞轮的转速(车速)和各个车轮的制动扭矩,它可以同时输出这两种信号到数据采集单元;在制动盘上还安装有磁电感应式轮速传感器,用来测量轮速的变化;磁粉离合器是整个系统的核心部件,其产生的扭矩与励磁电流成正比,主从动轴之间的扭矩关系可通过调整励磁电流来获得;所有机械部件都由弹性联轴器连接在一起,可以消除制动盘与磁粉离合器从动轴以及扭矩传感器与磁粉离合器主动轴间的偏心。测试系统结构如图2所示。

图2 试验台系统结构Fig.2 System structure of test stand
1.2 测试系统工作原理
利用电机带动飞轮旋转到测试转速,飞轮一侧通过联轴器与扭矩传感器相连,扭矩传感器可以同时对车速和扭矩进行测量,在制动前飞轮转速与车速相同,也与轮速相同,通过确定测试路况组合形式来调整4组磁粉离合器的励磁电流,保证至少有两组磁粉离合器扭矩传递关系不一致,当踩下制动踏板开始制动实验时,轮速与车速间将会产生速度差,通过安装在制动盘上的轮速传感器对轮速进行测量。当制动盘即将进入抱死状态时,ABS电控单元会根据传感器反馈参数的计算,合理地调节车轮轮缸制动压力,进而控制车轮制动力矩的大小,在这个过程中还可以对磁粉离合器的励磁电流进行进一步调整,将测试过程动态化,通过测控系统采集的各项参数就能够对整个制动过程中ABS的具体性能做出评价。在测速方面实验台计算车轮滑移率的方法要优于实际车辆,实际车辆是利用轮速来估算车速,从而得到滑移率,而在实验台上车速与轮速分开,可以对滑移率更精确的计算。该测试系统具有从0~160 km/h的测速范围。
2 转动惯量模拟
飞轮的设计与计算是整个试验台重要的部分,它决定了实验结果的准确性,飞轮转动惯量的计算公式为
式中:IF为前车轮转动惯量;IR为后车轮转动惯量;δ为空车质量系数,试验中取为7%;G0为汽车额定质量;G为汽车满载质量;r为车轮滚动半径;g为重力加速度;β为前后车轮制动力分配比。
前后轮制动力分配比定义为

式中:Ff为前轮制动器的制动力;Fr为后轮制动器的制动力。
所模拟汽车的转动惯量与汽车本身的重量G、车轮滚动半径r、前后车轮制动力分配比β相关[5]。
通常来说,一辆轿车满载时的重量大约在1 300~2 100 kg,前后车轮制动力分配比接近1∶1,车轮滚动半径大约在0.3 m左右,因此单轮转动惯量的区间可设定在25~62 kg·m2的范围内。为满足不同载重车辆测试需要,将全部飞轮片分为两组:一组为转动惯量粗调组,另一组为转动惯量细调组。按轿车制动器台架试验方法(QC/T564-1999)标准规定,转动惯量的允许误差为±5%(误差精确度定义:模拟量与被模拟量之差除于模拟量)[6],因此,细调组每片转动惯量与粗调组每片转动惯量之比应满足如下关系,即
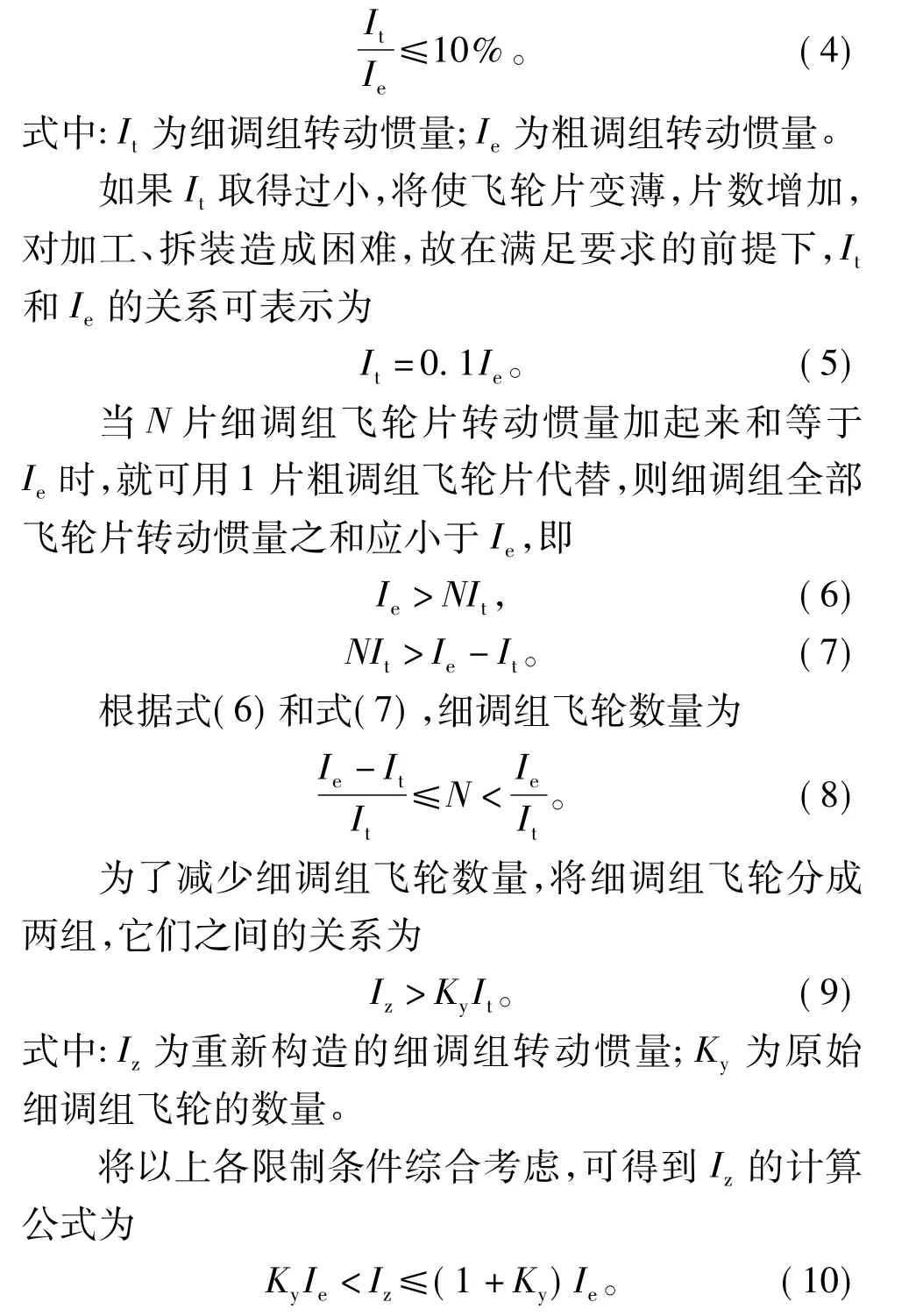
通过以上公式的分析,最终设计了3种不同转动惯量的飞轮,分别为20 kg·m2、4 kg·m2和 2 kg·m2。因此实验台单轮结构中20 kg·m2飞轮3片、4 kg·m2飞轮4片、2 kg·m2飞轮1片。通过飞轮不同组合可以模拟多种车辆的转动惯量。
3 制动路况模拟
本实验台无变速机构,同时为保证实验安全性和可靠性,离合器选型须留出一定的余量,所以选择离合器额定输出转矩为2 000 N·m,对应励磁电流为0~3 A。磁粉离合器的静态特性反映了其励磁电流与扭矩之间的关系,在弱激磁区与饱和区之外有较大的线性区[7-8]。本文通过实验台架对磁粉离合器静态参数进行了校准测量,包括励磁电流上升与下降时的转矩特性,测试数据如图3所示。图3为数据拟合曲线,图中实线为励磁电流下降时所对应的转矩曲线,虚线为励磁电流上升时所对应的转矩曲线,两条曲线间有很窄的磁滞回路,因为在励磁控制时存在磁滞现象,使得上升曲线和下降曲线所对应的转矩存在微小差异。从图中可以看出,磁粉离合器具有较宽的线性调节区域。
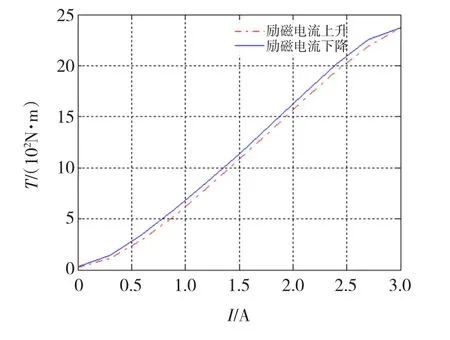
图3 磁粉离合器静特性曲线拟合Fig.3 Static characteristic curve fitting of magnetic clutch
对于ABS测试系统来说,机械制动系统为车轮提供的制动力与实际被测车辆相同,而轮胎与路面间的摩擦力则由磁粉离合器产生,此时由磁粉离合器与飞轮之间的扭矩传感器所测量的扭矩值就是摩擦力力矩,摩擦力力矩的计算公式为

式中:T为磁粉离合器传递的扭矩值;Tb为车轮制动力矩;I为车轮转动惯量;ω'为车轮角减速度;FZ为车轮垂直载荷;T0为磁粉离合器额定扭矩值;i0为磁粉离合器额定励磁电流值;i为磁粉离合器实际励磁电流值;R为车轮滚动半径;μ为摩擦系数。
由磁粉离合器静态特性可知,励磁电流与扭矩成正比例关系,因此励磁电流与摩擦系数之间也存在线性关系,但由于电流上升和电流下降时转矩略有差异,所以在电流控制时统一使用电流上升方式进行控制,在每次测试结束后用直流方法进行退磁,保证下次测试时启动转矩为零。励磁电流上升控制时制动力矩和摩擦系数的关系如表1所示。

表1 励磁电流与制动力矩和摩擦系数的关系Table 1 Relationship of exciting current and braking torque and friction coefficient
4 路面模拟方法的硬件实现
磁粉离合器的转矩传递与励磁电流成正比,因此采取控制励磁电压的方法来调节转矩。所使用的磁粉离合器内阻为11 Ω,可视为阻感元件,对其驱动元件占空比进行控制就能够达到控制励磁电流的目的。磁粉离合器驱动控制部分的主电路如图4所示。图中省去了关于MOSFET、三极管的驱动电路。U1为电流传感器,具有双向测试功能,输出信号作为励磁电流控制算法中的反馈信号。
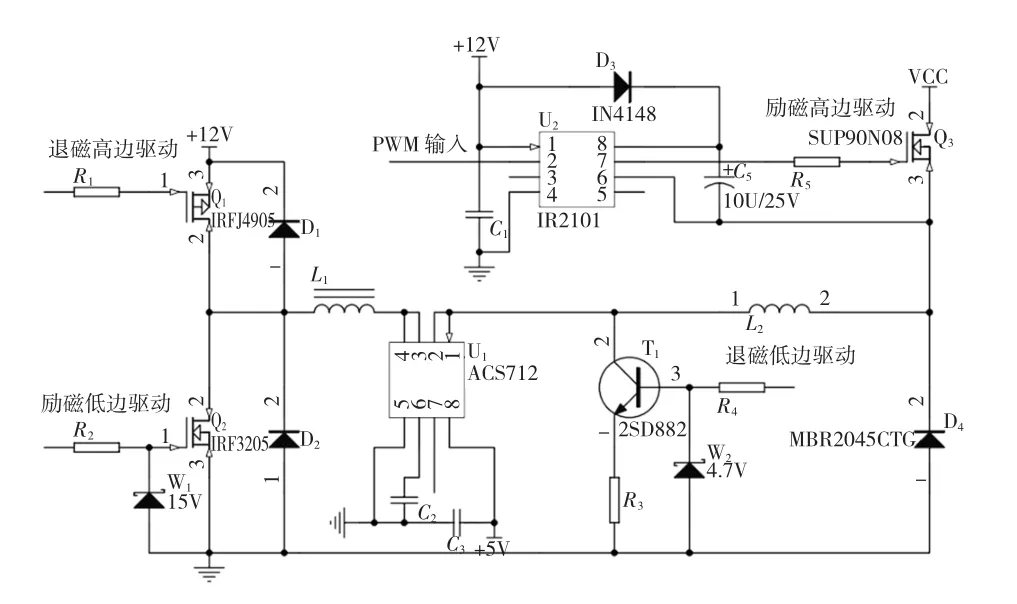
图4 磁粉离合器励磁电路Fig.4 Excitation circuit of magnetic powder clutch
以Q2、Q3、L2和D4构成 Buck电路作为磁粉离合器励磁电路,电路进行励磁控制时,Q2持续导通[9]。对于Q3的驱动采用自举电路,将电容C5放电电压和电源电压叠加,从而使驱动电压升高,实现对MOSFET的控制。以Q1、T1、R3构成磁粉离合器恒流退磁电路,由图4可知,磁粉离合器剩磁较少,所产生的扭矩在25 N·m左右,因此采用在磁粉离合器控制端加载反向直流的方法进行退磁。退磁时,励磁电路关断,Q1和T1导通,因此只需调整限流电阻R3即可方便地调整磁粉离合器的反向退磁电流。在实际测试中,退磁电流值通常设定为0.1~0.2 A,退磁时间约为3 s。励磁控制时脉宽与负载电压如图5所示。

图5 驱动信号与输出电压波形Fig.5 Drive signal and the output voltage waveform
5 数据采集与控制
数据采集与控制系统由传感器、物理硬件、工控机以及驾驶员构成。整个系统分为5个层次,即驾驶员操作控制、液压执行机构、传感系统数据采集、硬件接口及实时通信、虚拟现实。驾驶员的动作通过轮缸压力传感器、制动开关、轮速与车速传感器进行采集,用于整车动力学模型的计算,然后利用虚拟技术将车辆运行状态显示出来。
ABS数据采集与控制系统主要完成以下几个任务:
1)数据显示。前面板上需要实时显示飞轮转速(车速)、轮速、4个轮缸的制动压力、轮胎与轮面间的滑移率、制动扭矩、制动距离等参数。
2)能够实现对4组磁粉离合器励磁电流的分别控制,能够控制电机转速。
3)具有指示及故障报警功能,包括对钥匙门信号、冷却系统温度和制动踏板动作的检测。
4)能够以动态画面的形式显示车辆制动过程。
5)数据存储,记录每次实验的数据和波形。
由于本文提出的台架测试方法针对的是ABS独立测试,所以在进行测试时为了能够更加形象地展现汽车的制动过程,设计了一个动画环境,突出视觉和听觉感官。它能够通过检测外部信号,提供给实验人员更加真实的场景。所设计的虚拟环境与模拟驾驶系统有两点明显的差别:测试系统本身的结构决定只能够对车辆控制器进行直线实验;虚拟环境的改变只取决于制动信号,所以该虚拟环境只能识别车速信号与制动信号,并且只能显示车辆直线行驶时的状态。
6 试验验证及数据分析
6.1 单一路面试验
在城市内,车辆通常行驶于干燥的柏油路面上,首先利用测试系统对这种单一路面进行模拟,4组磁粉离合器励磁电流均设为1.28 A,试验初速度为65 km/h。试验过程中分别对制动压力、轮速、车速进行了检测,同时根据车速与轮速信号计算滑移率,测试数据如图6~图8所示。

图6 轮缸制动压力曲线Fig.6 Curves of wheel cylinder brake pressure

图7 轮速曲线Fig.7 Curves of wheel speed
由图6可知,车轮制动力基本维持恒定,ABS对轮缸制动压力的调节不明显,其原因在于干燥的柏油路面能够为轮胎提供足够的摩擦力。
ABS的主要功能是当车辆处于紧急状态时,它能够保持车辆的稳定性,从实验的角度讲,制动时车辆仍能沿直线前行是判断ABS工作性能的基本标准,此时四轮轮速应基本保持一致,图7为实验过程中四轮轮速的变化情况,由图可知,在制动过程中四轮轮速在同一时刻基本保持一致。
图8为四车轮的滑移率。通过测试波形可知,在制动过程中,由于ABS干预使滑移率的波形并不连续,但滑移率的峰值基本上都在允许的范围内。
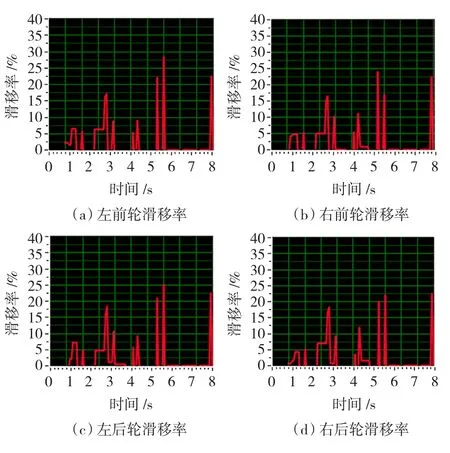
图8 滑移率曲线Fig.8 Curves of slip rate
6.2 对开路面试验
ABS通常在冰雪路面上工作效果明显,这里选择柏油(覆盖物干细沙)——冰这组对开路面进行试验。将磁粉离合器的励磁电流分别设置为1.04 A、1.04 A、0.47 A、0.47 A,也就是说模拟的实际车辆左侧车轮行驶于柏油(覆盖物干细沙)路面,右侧车轮行驶于冰面。
实验初始速度设定为65 km/h,轮缸制动压力、轮速和滑移率曲线如图9~图11所示。
由图9可知,左侧车轮的制动压力明显比右侧车轮高,其原因在于右侧车轮行驶于冰面,冰面的附着系数很小,过大的制动力容易造成车轮抱死,所以ABS需根据轮速传感器反馈信号自动对右侧车轮的制动力进行调节,左侧车轮与地面间有相对较高的摩擦系数,必须增加制动力使4个车轮的变化基本保持一致。通过曲线还能够看出制动压力的调节频率并不是很高,主要原因有两个方面:ABS要将调节频率尽量降低,最大限度地减缓制动踏板的抖动,降低驾驶员恐惧感;对制动踏板的踩踏力的大小也会影响调节频率。
由图10可知,ABS能够将4个车轮的轮速保持一致。
从滑移率的波形上看,汽车制动时ABS将滑移率的峰值努力维持在15% ~25%范围内,从而缩短制动距离,提高汽车制动稳定性。

图9 轮缸制动压力曲线Fig.9 Curves of wheel cylinder brake pressure

图10 轮速曲线Fig.10 Curves of wheel speed

图11 滑移率曲线Fig.11 Curves of slip rate
6.3 对接路面试验
对接附着系数路面上的紧急制动试验主要用于对ABS系统控制逻辑中路面识别能力及其动态响应性能的评价[10]。对接路面有两种组合形式,如图12所示。
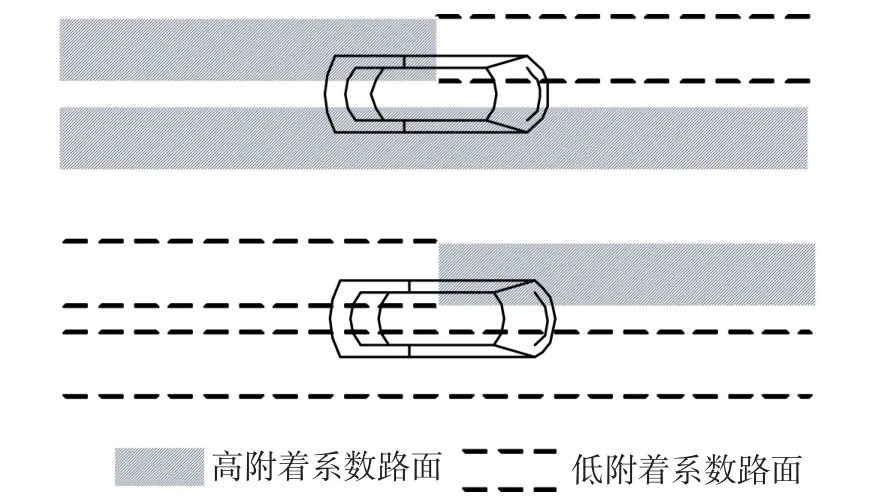
图12 对接路面组合形式Fig.12 Joint roads combination
本文以汽车从高附着系数路面制动后驶入低附着系数路面为例进行相关试验,选择柏油(干燥)——雪路面组合,初始速度设定为65 km/h,磁粉离合器的励磁电流分别设置为1.28 A、1.28 A、0.64 A、0.64 A,即左侧车轮行驶于柏油(干燥)路面,右侧车轮行驶于雪路面,考虑磁滞回线的影响,在软件控制上对目标励磁电流增加补偿,以保证试验精确度。试验结果如图13~图15所示。
由图13可知,当左侧车轮附着系数由高(μ=0.8)到低(μ=0.3)发生突变时,ABS能够快速识别路面的变化情况,并及时对轮缸制动压力做出调整,右侧车路制动压力基本维持恒定。
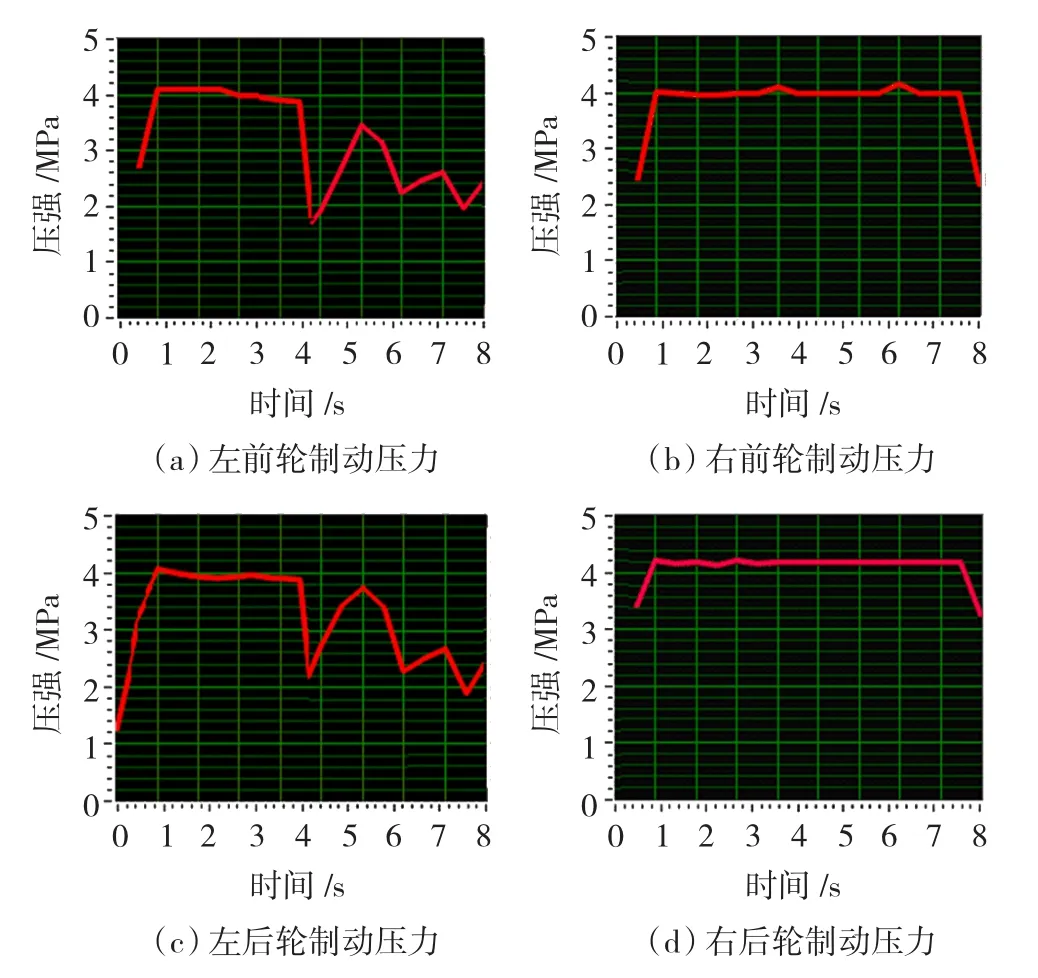
图13 轮缸制动压力曲线Fig.13 Curves of wheel cylinder brake pressure
由图14可知,在对接路面的测试中,ABS能够对路况的变化做出快速响应,能够将4个车轮的轮速保持一致,但是由于雪面附着系数较低,车辆的制动时间也要比在高附着系数路面长,相应的制动距离也会有所增加。

图14 轮速曲线Fig.14 Curves of wheel speed
由图15可知,当路面附着系数发生突变时,车轮滑移率的变化非常明显,但其峰值也能够在ABS的控制下维持在最优区域内。
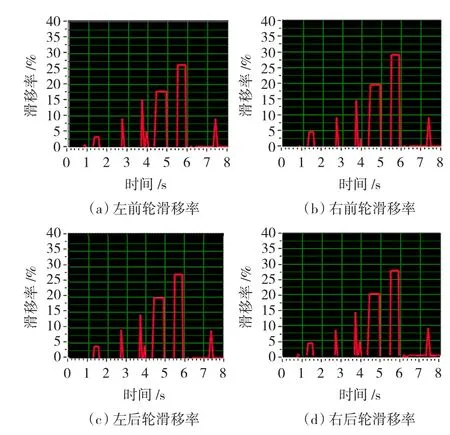
图15 滑移率曲线Fig.15 Curves of slip rate
从整个数据采集与控制系统来看,在对ABS 的分组测试中,各组性能参数都能够稳定准确地表现出来,并且整个制动过程都在测控系统中形象地展现出来。这里仅对有代表性的路面组合进行了试验,对ABS制动性能的评价还需要进行多种路况的反复测试。
7 结语
通过对ABS测试技术的研究,提出了一种基于磁粉离合器模拟实际路况和基于飞轮惯量模拟实车平动惯量的ABS动态性能台架独立测试方法,并通过3种路面组合实验对其可行性进行了检验。该测试技术有效缩短测试时间,降低测试成本,具有较高的测试精确度,可进一步推广到中大型车辆制动系统的检测中使用。需要指出的是,目前所研究的机械台架只能针对固定型号的ABS进行测试,其通用性还有待于进一步研究和完善。
[1] 黄磊.ABS动态模拟实验台基础研究及结构设计[D].哈尔滨:哈尔滨理工大学电气与电子工程学院,2008.
[2] CHOI S B.Antilock brake system with a continuous wheel slip control to maximize the braking performance and the ride quality[J].IEEE Transactions on Control Systems Technology,2008,16(5):996-1003.
[3] 黄伟,孙仁云,王波,等.基于LabVIEW的汽车制动性能测试系统[J].华西大学学报:自然科学版,2007,26(1):5-7.HUANG Wei,SUN Renyun,WANG Bo,et al.Vehicle brake performance test system based on LabVIEW[J].Journal of West China University:Natural Science Edition,2007,26(1):5-7.
[4] ZHOU K,WANG X D,ZHANG C,et al.System design of ABS dynamic simulation test stand[J].International Journal of Vehicle Systems Modelling and Testing,2010,5(2-3):197-212.
[5] 张立斌,苏建,单洪颖,等.基于惯性质量模拟的汽车ABS检测方法[J].吉林大学学报:工学版,2009,39(S1):115-118.ZHANG Libin,SU Jian,SHAN Hongying,et al.Vehicle ABS test method based on inertia simulation[J].Journal of Jilin University:Engineering and Technology Edition,2009,39(S1):115-118.
[6] QC/T564-1999,轿车制动器台架试验方法[S].
[7] WU X G.A research on the fuzzy control of magnetic powder clutch based on adaptive weight particle swarm optimization[J].Automotive Engineering,2010,32(6):510 -514.
[8] 周云波,常思勤.磁粉离合器仿真分析研究[J].中国机械工程,2010,21(10):1149-1152.ZHOU Yunbo,CHANG Siqin.Simulation and analysis of magnetic particle clutch[J].China Mechanical Engineering,2010,21(10):1149-1152.
[9] 王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2007:100-103.
[10] WANG X D,LIU J,ZHOU K.Real-time data acquisition system for vehicle ABS test stand[J].International Journal of Vehicle Safety,2011,5(3):271-285.