一种提高导航精度的改进滤波方法
2013-04-07洪海斌李英成
洪海斌,郭 杭,殷 红,李英成
(1.南昌大学,江西南昌 330031;2.中测新图(北京)遥感技术有限责任公司,北京 100039)
一、引 言
GPS/INS组合克服了各自缺点,取长补短,使组合后的导航精度高于两个系统单独工作的精度,并以其全天候、全球性三维定位、测姿和测速等特点,成为目前应用最广泛的一种组合导航系统。而卡尔曼滤波技术是GPS/INS组合导航中最为关键的技术之一,各国学者在卡尔曼滤波的基础上也提出了许多新的改进滤波方法。其中,扩展卡尔曼滤波(extended Kalman filter,EKF)、无味卡尔曼滤波(unscented Kalman filter,UKF)、粒子滤波(particle filter,PF)等非线性滤波的广泛提出,对卡尔曼滤波适用范围的局限性进行了很好的补充。
在测绘、遥感等相关领域,常常需要提供最准确的位置、姿态信息,它们的工作往往是基于事后对数据的快速获取与处理,通过一些最优算法来达到最理想的需求。而逆向导航技术正是基于所有观测数据采集完成以后的事后处理方法。本文在正向导航滤波算法和逆向导航滤波算法之上采用组合滤波算法对实际机载数据进行测试,从测试结果可以看出组合滤波方法提高了组合导航信息的精度。
二、逆向组合导航滤波算法
和正向组合导航滤波方法一样,逆向组合导航滤波算法也需要利用加速度计及陀螺仪速度增量和角增量信息进行捷联解算,并在解算过程中寻找与GPS相同时刻的位置、速度信息作组合。最后利用卡尔曼滤波估计导航参数的误差来达到对位置、速度及姿态信息进行修正的目的。
从算法表达形式上来说,二者是完全一致的。在进行逆向捷联解算过程中只需将陀螺仪的角速率、速度及地球自转角速率符号取反。捷联解算姿态、速度和位置更新如下

在完成捷联解算过程中,采用GPS/INS组合的速度和位置组合方式,并进行卡尔曼滤波处理。
三、改进后的组合滤波算法
组合滤波算法是基于正向导航滤波和逆向导航滤波基础之上的。在将其二者结合之前,需要存储正向导航滤波和逆向导航滤波过程中的基本导航信息及卡尔曼滤波过程中滤波矩阵P的协方差信息。组合过程和组合算法如图1所示。

图1 组合滤波过程
组合算法如下所示

式(4)和式(5)中,下标‘f’、‘r’和‘in’分别表示前向滤波、逆向滤波和组合滤波。根据正向滤波和逆向滤波过程中存储的滤波矩阵P的对角线元素均方根值的大小,通过式(4)、式(5)将二者有机地结合起来重新计算载体的位置、速度及姿态信息。
四、机载飞行试验及解算结果分析
解算过程中杆臂长度为[0.045 2.00 1.70],单位为m,3个轴方向为右、前、上;陀螺偏差与陀螺随机漂移均为0.01°/h,加速度计漂移为60 ug;正向、逆向滤波初始对准时间为10 min,对准过程均采用静态粗对准加精对准,粗对准时间为100 s,精度准时间为500 s;正向滤波和逆向滤波解算结束后,再用改进后的组合滤波算法完成导航信息的解算。针对每个不同阶段的导航信息,将其与高精度的IMU—IGI的解算结果进行比较,并分析多种不同算法对导航精度的影响。
1.逆向滤波结果
逆向滤波解算结果与IGI解算结果误差如图2所示。
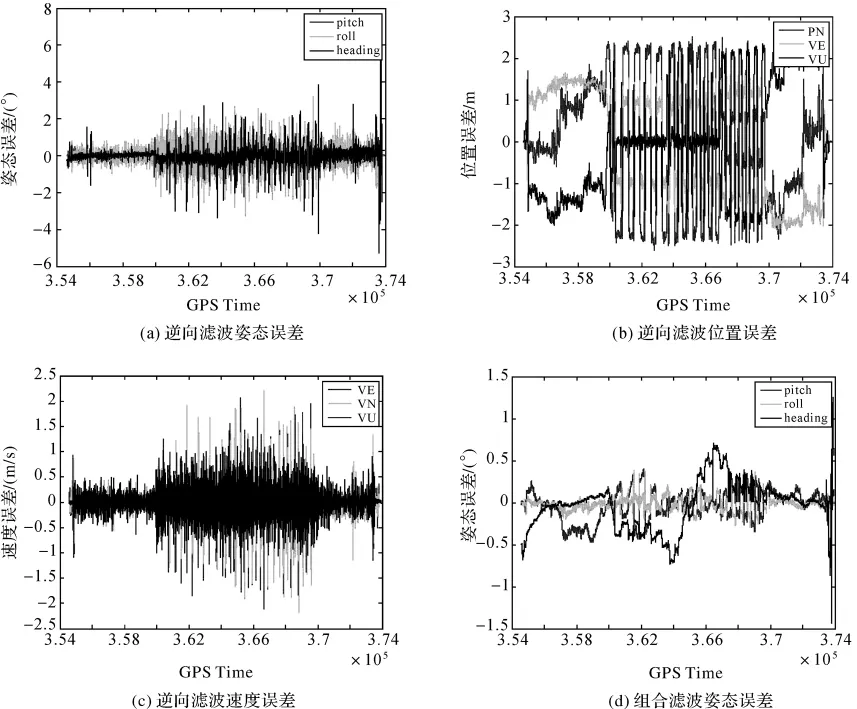
图2
2.组合滤波结果
组合滤波解算结果与IGI解算结果误差如图3、表1所示。
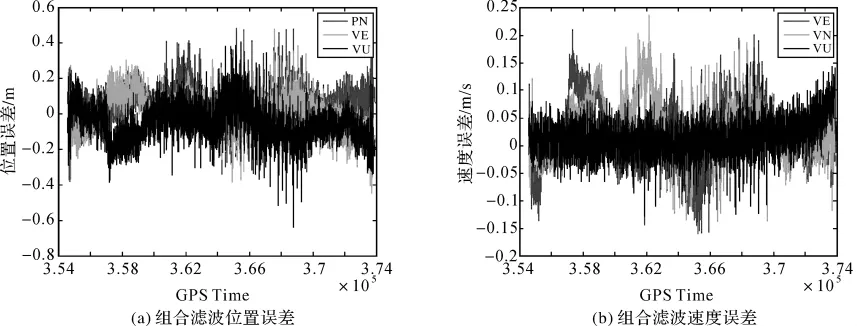
图3

表1 正向滤波、逆向滤波与组合滤波的误差分布
五、结束语
从图2、图3和表1可以看出,逆向滤波后的导航精度较正向滤波有了一定的提高。而采用正向滤波和逆向滤波有机结合的组合滤波的位置、速度信息的精度比逆向滤波对应解算结果精度上提高了一个数量级;航向角提高了0.05°、横滚角提高了0.2°;组合滤波后的误差波动范围更小,系统表现得更加稳定。
[1] 严恭敏,严卫生,徐德民.逆向导航算法及其在捷联罗经初始对准中的应用[C].第27届中国控制会议.昆明:[s.n.],2008:724-726.
[2] 肖进丽,潘正风,黄声享.GPS/INS组合导航系统时间同步方法研究[J].测绘通报,2007(4):27-29.
[3] 刘建业,曾庆化,赵伟,等.导航系统理论与应用[M].西安:西北工业大学出版社,2010:278-282.
[4] 袁信,刘建业.用位置速度信息的GPS/SINS组合模式研究[J].导航,1992(4):70-79.
[5] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].2版.西安:西北工业大学出版社,2012:168-175.
[6] 刘建业,袁信.GPS/INS组合导航系统的平滑滤波应用研究[J].航天控制,1995(4):36-42.
[7] SHIN E H.Accuracy Improvement of Low Cost INS/GPS for Land Applications[D].Calgary:University of Calgary,2001:26-46.
[8] SHIN E H.Estimation Techniques for Low-Cost Inertial Navigation[D].Calgary:University of Calgary,2005:45-80.
[9] 胡东亮,罗斌凤.INS/GPS姿态组合导航系统卡尔曼滤波器设计[J].舰船电子工程,2007(4):64-66.
[10] 严恭敏.捷联惯导算法及车载组合导航系统研究[D].兰州:西北工业大学,2004:39-41.
