实时动态精密单点定位中的多路径效应削弱方法❋
2013-03-24万胜辉杨遵龙
万胜辉,杨遵龙,苏
(1.中国卫星海上测控部,江苏江阴214431;2.装备学院航天装备系,北京101416)
实时动态精密单点定位中的多路径效应削弱方法❋
万胜辉1,❋❋,杨遵龙2,苏1
(1.中国卫星海上测控部,江苏江阴214431;2.装备学院航天装备系,北京101416)
基于削弱实时动态精密单点定位多路径效应的目的,首先分析了多路径误差的产生原理,利用信噪比与高度角的关系判断多路径产生的来源,利用TEQC软件量化多路径误差的大小。其次分析了一般导航定位中的设置截止高度角法减少多路径效应在实时动态精密单点定位中的作用,试验表明这种方法并不适用于精密单点定位。基于Estimate SETC模型和Iono-Free LC对多路径效应对电离层改正的影响进行了研究,发现当多路径效应显著时,双频电离层改正会带来更大的误差,不利于精密单点定位的高精度解算。最后根据实际数据解算结果,在多路径效应显著的情况下,建议选用精确的模型改正消除电离层误差,而不使用双频消除电离层延迟法。
全球导航卫星系统;多路径效应;电离层延迟改正;精密单点定位
1 引 言
精密单点定位(Precise Point Positioning,PPP)技术由美国喷气推进实验室(JPL)的Zumberge于1997年提出。20世纪90年代末,由于GPS跟踪站的数量急剧上升,全球GPS数据处理工作量不断增加,计算时间呈指数上升。为了解决这个问题,作为国际GPS服务组织(IGS)的一个数据分析中心,JPL提出了这一方法,用于非核心GPS站的数据处理。该技术思路非常简单,在GPS定位中,主要的误差来源于3类,即轨道误差、卫星钟差和电离层延时。如果采用双频接收机,可以利用LC相位组合消除电离层延时的影响。根据PPP技术的要求,定位中需要系统提供卫星的精密轨道和钟差。目前,IGS的几个数据分析中心具备这个能力提供卫星的精密轨道和钟差。
PPP以单台双频GNSS接收机采集的相位数据作为主要观测值来进行解算,其精度可以达到分米级甚至厘米级。由于它利用单台双频接收机就可以实现在全球范围内静态或者动态定位,并且可以直接得到高精度的ITRF框架下的坐标,其在区域或全球性的科学考察、高精度动态导航定位等方面都有不可限量的应用前景。
多路径效应是卫星导航定位中重要的误差源,当其十分显著的环境下,将严重损害GNSS测量精度。本文基于船载GNSS接收机的实测数据,研究多路径效应对精密单点定位的影响。
2 多路径效应
2.1 多路径效应原理及其特性
在正常情况下,卫星信号沿光程最短路径从卫星直接到达接收机天线。如果天线附近有反射物体,到达接收机天线的信号为直接信号和反射信号的叠加信号。反射信号对观测值的影响产生了一个附加的时延量,这种现象称为多路径效应。
接收机所接收的信号分两类,即直接到达的信号和间接到达(物体反射和大气折射)的信号。这些信号一起被接收机所接收,相互干涉而产生一个复合信号,影响码和相位的量测,从而降低GNSS的定位精度。直达信号和多路径信号的合成信号可表示为[1]

其中,d(t)是导航电文;c(t)为伪随机码(C/A码或P码);A是载波信号振幅;ai为反射物体反射信号的能力即反射系数(0≤ai≤1,对于直达信号a0=1);ω0为GNSS信号载波角频率;Δi为第i个信号的相位延迟。
载波相位测量中的多路径效应影响主要是由信号相位延迟所引起的误差,而与d(t)、c(t)及A无关。
载波相位多路径误差的大小取决于反射系数a和Δ1。当a1→1,Δ1→π,Δc→π/2,此时可以引起1/4周的最大误差差。因此,L1信号的波长为19.05 cm,其最大误差为4.8 cm;L2信号的波长为24.42 cm,其最大误差为6.1 cm。对于L1和L2的线性组合而言,宽巷最大误差为21.5 cm,窄巷的最大误差为2.7 cm。可知,L1和L2的窄巷组合可以削减多路径的影响。
国内外许多学者普遍认为多路径反射信号对码观测值的影响要比对载波相位观测值的影响复杂得多,其误差影响将比对载波相位观测值的影响大200倍。在一般反射环境条件下可达几厘米,在高反射环境条件下可达几米甚至几十米。但多路径反射信号对码观测值的影响将不会超过一个码元的空间长度,即对于P码来说不会超过29.3m,而对于C/A码来说不会超过293m。
信噪比(SNR)是指接收的载波信号强度与噪声强度的比值,大多数的接收机将SNR表示C/No,单位为分贝赫兹(dBHz),主要受天线增益参数、接收机中相关器的状态、多路径效应三个方面的影响。那么,当卫星信号发生多路径效应时,卫星信号质量(观测精度)将会降低,SNR值将随之发生变化。信噪比能反映信号质量这一事实:当有多路径效应发生时,此时段上卫星观测值的SNR值会相应降低,可以作为判断多路径存在和大小的一个依据[2-3]。
2.2 多路径效应的削弱措施
多年来,国内外学者提出了许多削减GNSS多路径效应的方法。选择较好的GNSS测量点,避开强反射面(如水面、平整的建筑物表面等)和射频干扰源,能有效地削弱多路径效应的影响;基于硬件的多路径处理技术,包括选择造型适宜且屏蔽良好的GNSS天线以及对接收机内部相关算法的改进,都尽可能地在接收机信号处理阶段削弱码和(或)相位的多路径影响;基于软件的多路径处理技术,包括GNSS天线周围多路径环境图的绘制、对GNSS信号信噪比(SNR)的分析,以及各种滤波方法(如自适应FIR滤波、小波滤波和Vondrak滤波等)的运用,以进一步分离或削弱残余的多路径误差[2]。相对于静态的长时间观测,基于动态实时精密单点定位的多路径削减的方法较少。
3 PPP中的多路径效应
试验数据来自船测站的实测数据,船在海面上运动,并且船上雷达天线很多,周围金属很多,所处的环境多路径效应显著。
TEQC软件由UNAVCO(University NAVSTAR Consortium)开发研制,是目前GNSS观测站数据质量检测普遍采用的一个软件包。该软件通过伪距和相位观测量的线性组合,计算出L1、L2频段观测量的多路径效应、电离层对相位的影响、电离层延迟的变化和接收机的钟漂和周跳等。几个关键性指标MP1、MP2、O/slips都输出在结果文件中。O/slips表示观测值和周跳比,它直接反映了数据的周跳情况,MP1、MP2分别表示L1、L2频段上的多路径效应对伪距和相位影响的综合指标,其结果以均方差(RMS)表示,这两个值能较好地反映测站观测环境。计算公式分别为[4]

其中,P1、P2分别标表示L1、L2频段上的码伪距观测量;φ1,φ2表示L1和L2频段上的载波相位观测量;α=为L1、L2频段的频率f1和f2之比的平方。通常,TEQC的结果文件里输出观测时段MP1、MP2的RMS值。
图1为船测站示意图,天线周围有金属栏杆,左上方有雷达天线,由于金属的信号反射率较高,该天线所处的环境多路径效应显著。
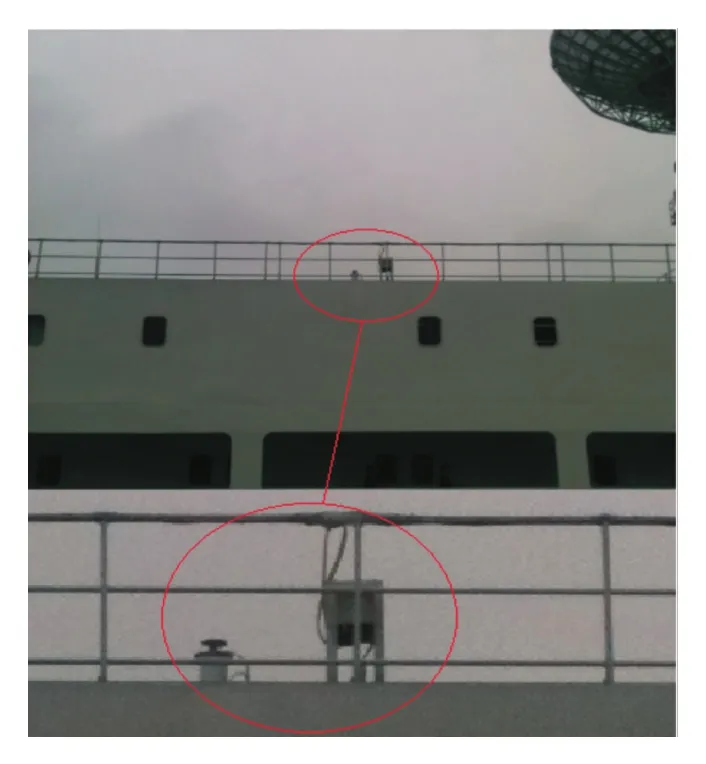
图1 船测站示意图
图2为TEQC软件给出的船载GNSS接收机周围多路径误差分布图。从图2中可以看出,船上的多路径误差非常大,其中最大的多路径误差可达80m,L1频段上的多路径误差基本在6m左右,L2频段上船站的多路径误差最高可达120m,一般的多路径误差也只10m,而一般情况下测站的L1、L2频段上的多路径误差一般在1m以内[5]。船上的这个测站的多路径效应显著。
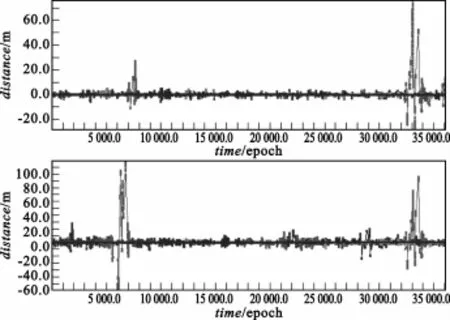
图2 船测站的多路径误差分布图(0°截止高度角)
3.1 利用信噪比及截止高度角分析多路径效应来源
图3是2011年6月5日以船测站为站心的卫星轨迹——L2频段信号SNR残差图。从图中我们可以发现第18号卫星的状况不是特别理想,在截止高度角在45°以上的情况下,其信噪比参数(SNR)还经常小于25 dBHz,而在同一时间段,类似的截止高度角甚至小于18号卫星,15号卫星的信噪比参数(SNR)至少在40 dBHz以上。
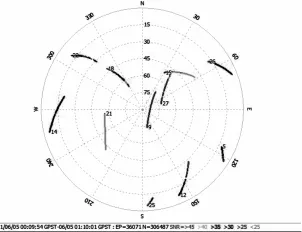
图3 船测站站心卫星轨迹图-L2频段SNR值图
图4和图5是18号和22号卫星的SNR和方位角以及高度角的图,可以从中判断其不是一般的多路径的影响,而肯定是有遮挡,18号卫星在方位角300°左右和直到330°左右SNR值恢复正常,可以断定遮蔽物就在测站方位角300°~330°之间,正好与测站左前上方有雷达天线的现实情况吻合。同时22号卫星的情形也十分类似,也可以更加证实这一点。
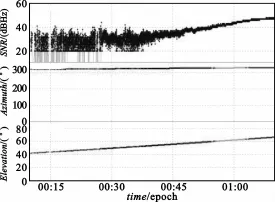
图4 18号卫星L2频段信噪比与方位角及高度角的分布图
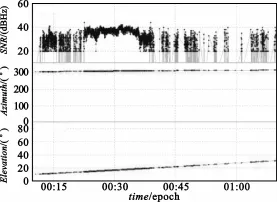
图5 22号卫星L2频段信噪比与方位角及高度角的分布图
3.2 PPP定位精度与卫星截止高度角的关系
一般情况下多路径效应的强弱跟卫星的高度角大小有关,高度角越小,多路径效应越强烈。因此在一般的单点及相对定位中,常常通过选择一定阀值的截止高度角来减少多路径效应对定位精度的影响。截止高度角一般选为15°~25°,可以有效避免低高度角卫星的多路径效应对定位结果的影响[6]。
图6是利用船实测数据,在PPP解算时截止高度角分别选取0°、5°、10°、15°、30°、40°的N方向解算内符合精度图。由于篇幅限制,E、U方向内符合精度图不再列出,E、U方向趋势和结果与N方向一致。如图所示,当截止高度角为0°时和为5°时,3个坐标分量的内符合精度曲线基本重合。但是随着所选择的截止高度角的继续增加,PPP解算的3个坐标分量的内符合精度开始不断地降低,在截止高度角为15°时就有部分结果定位精度从分米级到米级。

图6 N方向不同截止高度角内符合精度
由PPP定位原理可知,PPP技术一般需要将测站天顶的对流程延迟与位置、钟差等参数一起进行滤波估计,因此必须充分利用观测数据加速PPP估值的分离与收敛,图中当截止高度角为0°和5°时,精度曲线基本重合,故建议在进行PPP解算时观测值的截止高度角一般选为5°。传统的通过截止高度角的方法来削弱多路径的影响并不适合实时PPP的解算。
3.3 多路径效应对PPP解算中电离层延迟改正的影响
图7和图8是在不同截止高度角0°和5°的情况下,PPP解算中电离层改正使用Estimate STEC模型和使用iono-free LC消除电离层一阶项,在N、E、U三个方向的内符合精度的对比,从图中可看出,使用iono-free LC消除电离层一阶项带来的误差大于使用Estimate STEC模型估计电离层延迟的策略,当截止高度角为10°、15°、30°时结论相同,由于篇幅限制不再单独列出。
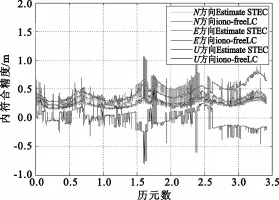
图7 截止高度角为0°时电离层Estimate STEC改正与iono-free LC电离层改正精度对比

图8 截止高度角为5°时电离层Estimate STEC改正与iono-free LC电离层改正精度对比
图9和图10是TEQC软件在观测时间段内通过伪距和相位观测量的线性组合计算出的27号卫星和26号卫星的电离层延迟。

图9 27号卫星电离层延迟

图10 26号卫星电离层延迟
在观测时间段里一共观测到11颗卫星,其中有4颗卫星的电离层延迟曲线是平滑的,处于比较好的状态,就像图9中的27号卫星一样,这4颗卫星号分别是9、15、21、27,见图3,同时也是在观测时间内高度角最高的4颗星,它们的信噪比(SNR)都是40 dBHz以上,方位角也不在300°左右,没有遮挡,可以认为是信号没有受到多路径效应影响的卫星。可以使用双频相位数据和伪距线性组合算出电离层延迟,它们的曲线是光滑的、渐变的,理论上电离层延迟也应该是渐进、平滑的。其余的5、12、14、18、22、25、26号卫星,TEQC计算出的电离层延迟和图10中的26号卫星类似,都有野值发生。个别星如22号卫星,电离层延迟量跳变。22号卫星的高度角在15°与30°之间,经上面的分析它还被天线遮挡。
理论上电离层延迟时连续平缓渐变的,而图中的5、12、14、18、22、25、26号卫星都出现了极大的跳变,而这几颗卫星又是受多路径影响最严重的几颗卫星,见图4信噪比和高度角关系。
从TEQC以及PPP解算真实数据中可发现,比较强的多路径效应会对双频改正电离层产生不利的结果,如图9所示,卫星26电离层的野值可达到几米,当那个历元时刻使用双频确定电离层延迟时,会给实时动态PPP解算带来不好的因素,尤其11颗卫星中有7颗卫星受到强烈的多路径效应影响。
从上面的PPP解算结果和TEQC双频确定电离层延迟的结论中我们可以得出,当多路径效应显著时,依靠双频消除电离层误差反而会引进更大的误差。
4 结束语
本文分析了多路径效应的原理,针对精密单点定位的应用,利用测量船上实测数据,对多路径对精密单点定位的影响进行了详细的分析,并在多路径影响比较严重的情况下,给出了相关的削弱精密单点定位中多路径的一些解算策略。
本文基于削弱多路径效应对精密单点定位的目的,首先分析了多路径误差的产生原理,利用信噪比以及高度角的关系判断多路径产生的来源,利用TEQC软件量化多路径误差的大小。其次分析了一般导航定位中的设置截止高度角法减少多路径效应在PPP中作用,试验表明这种方法并不适用于PPP。本文基于Estimate SETC模型和Iono-Free LC对多路径效应对电离层改正的影响进行了研究,发现当多路径效应显著时,双频电离层改正会带来更大的误差,不利于PPP的高精度解算。
本文建议在多路径效应显著的情形下,建议截止高度角设置为5°,消除电离层误差建议选用精确的模型改正,而不使用双频消除电离层延迟法。
下一步研究方向,利用观测数据信噪比信息对观测数据的赋权,以提高PPP解算的精度。
随着我国北斗导航系统开始试运行,在轨导航卫星个数不断增加,可利用的系统和频段随之增加,对PPP解算中消除多路径误差将会有更多选择和方案。
[1]张波,黄劲松,苏林.利用信噪比削弱GNSS多路径效应的研究[J].测绘科学,2003,28(3):32-35.ZHANGBo,HUANG Jin-song,SU Lin.Mitigation of Multipath Effect Using SNR Values[J].Science of Surveying and Mapping,2003,28(3):32-35.(in Chinese)
[2]范晓燕,周乾.测量中多路径效应研究综述[J].工程地球物理学报,2010,7(3):382-386.FAN Xiao-yan,ZHOU Qian.Review of Multi-path Effects in GNSSMeasurement[J].Chinese Journal of Engineering Geophysics,2010,7(3):382-386.(in Chinese)
[3]吴宇航,陈秀万,吴才聪.利用信噪比消弱多路径误差的方法研究[J].武汉大学学报信息科学版,2008,33(8):842-845.WU Yu-hang,CHEN Xiu-wan,WU Cai-cong.Mitigation of Multi-path Effect Using SNR Values[J].Journal of Geometrics and Information Science ofWuhan University,2008,33(8):842-845.(in Chinese)
[4]魏二虎,王中平,龚真春.TEQC软件用于GPS控制网数据质量检测的研究[J]测绘通报,2008,6(9):7-8.WEIEr-hu,WANG Zhong-ping,GONG Zhen-chun.On the Data Quality Detection of GPS Control Network with TEQC Software[J].Bulletin of Surveying and Mapping,2008,6(9):7-8.(in Chinese)
[5]杨哲,戴吾蛟,余文坤,等.不同观测环境中基于TEQC的GNSS数据质量分析[J].大地测量与地球动力学,2010,30(5):35-139.YANG Zhe,DAIWu-jiao,YUWen-kun,et al.Quality Analysis of GNSSData Based on TEQC in Different Environments[J].Journal of Geodesy and Geodynamics,2010,30(5):35-139.(in Chinese)
[6]李玮,程鹏飞,秘金钟.基于PPP技术的伪距多路径效应分析[J].大地测量与地球动力学,2011,(31):98-101.LIWei,CHENG Peng-fei,MI Jin-zhong.Analysis of Pseudo-range Multipath Effects Based on Precise Point Positioning Technology[J].Journal of Geodesy and Geodynamics,2011,(31):98-101.(in Chinese)

万胜辉(1983—),男,安徽阜阳人,2010年获硕士学位,现为工程师,主要从事航天测控总体技术方面的研究;
WAN Sheng-hui was born in Fuyang,Anhui Province,in 1983.He received the M.S.degree in 2010.He isnow an engineer.His research concerns aerospace TT&C technology.
Email:shenghuiwan@yahoo.com.cn
杨遵龙(1987—),男,吉林通化人,硕士研究生,主要研究方向为GNSS数据处理;
YANG Zun-long was born in Tonghua,Jilin Province,in 1987.He is now a graduate student.His research direction isGNSS data processing.
苏龙天(1980—),男,江苏靖江人,2010年获硕士学位,现为工程师,主要从事航天测控总体技术方面研究。
SU Yan was born in Jingjiang,Jiangsu Province,in 1980.He received the M.Sdegree in 2010.He is now an engineer.His research concerns aerospace TT&C technology.
M itigation of M ultipath Effects in Real-time Kinematic Precise Point Positioning
WAN Sheng-hui1,YANG Zun-long2,SU Yan1
(1.China Satellite Maritime Tracking and Control Department,Jiangyin 214431,China;
2.Department of Space Equipment,Academy of Equipment,Beijing 101416,China)
This paper investigatesmitigating themulti-path effect in real-time dynamic PPP(Precise Point Positioning).First,the generation principle ofmulti-path errors is analyzed,the source ofmulti-path generation is determined by using the relationship between elevation angle and SNR(Signal-to-Noise Radio),the size ofmulti-path error is quantified by using TEQC software.Second,the role of setting cut-off anglemethod to reduce multi-path effects in real-time dynamic PPP is discussed,test shows that thismethod is not applicable for PPP.By studying the impact of themulti-path effects on the ionosphere correction based on the Estimate SETCmodel and Iono-Free LC,it is found that in significantmulti-path effects condition,the dual-frequency ionosphere correction will lead to greater error,which is not conducive to a high PPPprecision solver.Finally,according actual data solver,in the significantmulti-path effect cases,the use of precisemodel correction is suggested to eliminate the ionosphere error,instead of using the dual-frequency.
GNSS;multi-path effect;space instrument ship;precise point positioning
P228.41;TN911
A
1001-893X(2013)03-0312-06
10.3969/j.issn.1001-893x.2013.03.017
2012-08-01;
2012-09-10 Received date:2012-08-01;Revised date:2012-09-10
❋❋通讯作者:shenghuiwan@yahoo.com.cn Corresponding author:shenghuiwan@yahoo.com.cn