基于MATLAB的交流电源频率调节环路仿真
2013-03-24刘爱元刘持胜戴洪德
刘爱元,刘持胜,戴洪德
(海军航空工程学院a.控制工程系;b.外训系,山东烟台264001)
飞机上实现交流电源系统输出频率恒定通常采用的方法是加装频率调节环路和恒速传动装置。然而,频率调节环路和恒速传动装置在工作过程中因参数的变化,将直接影响交流电源系统的动静态特性,甚至造成系统的不稳定,且这种影响会随着飞机发动机工作状态的变化而变化[1-2]。
本文基于以上考虑,按照文献[3-7]的研究方法,结合某型恒频交流电源频率调节环路的工作原理,在建立系统数学模型的基础上,用MATLAB语言[8]对某型飞机发动机在中转速负载状态下,通过改变系统滤波整形放大电路第一级滤波器放大倍数k1和频率敏感电压变换电路传导系数k5等参数进行仿真,得出其参数变化对系统动静态特性所造成的影响,其仿真结果及所得结论既可为进行该系统研究的人员提供参考,又为某型飞机该系统的技术保障提供了有效的技术支持。
1 系统组成及工作原理
频率调节环路主要由频率敏感和频率电压变换电路、基准信号电路、两级一阶有源滤波整形放大电路、PID 校正电路、电压比较电路、脉宽调制与功率放大电路、电磁恒装等构成,系统的组成框图如图1 所示。[9-10]

图1 频率调节环路组成框图
系统工作原理是:当变速恒频交流发电系统因受到某种干扰而导致系统频率偏离稳定值时,频率敏感电路即敏感此频率的变化,并经频率电压变换电路转换成相应的电压信号U2,该电压信号U2与来自基准信号电路的电压U基进行比较,产生的偏差信号ΔU经两级一阶有源滤波和整形放大电路,滤除其高次谐波,获得幅值为0.5 V、频率为400 Hz 的三角波,此三角波经PID校正电路和电压比较电路送入脉宽调制和功率放大电路,获得脉冲方波信号。
此脉冲方波在不同的状态下具有不同的导通截止比,这种导通截止比控制功率放大电路,以获得相应的导通截止比,进而控制电磁恒装中激磁电流的大小,使其同步转速n稳定在一定精度范围内。例如,当干扰使交流发电机的输出频率降低时,两级一阶有源滤波的反相输入电位降低,PID 校正电路的输出信号升高,电压比较器的输出降低,电磁恒装中激磁电流增大,使其同步转速n上升,输出频率升高,将其频率调整到规定的范围内。
2 频率调节环路数学模型的建立
1)频率敏感和电压变换电路。频率敏感和电压变换电路相当于从频率到电压的一个变换器,在数学上可用一个比例系数来描述。当电网频率f=400 Hz,电压U=0.96 V 时,该变换电路的比例系数为:

2)滤波整形放大电路。滤波整形放大电路采用了两级一阶有源滤波器,可使滤波时间常数下降到几乎不影响系统的动态品质,又可产生一个在形状和幅值上能满足后级使用的三角波。本级参数选择应遵循:输出幅值为0.5 V而频率为400 Hz的调制三角波,其时间常数尽可能小,尽可能提高其放大倍数。为此选定:
第一级滤波器:时间常数T1=6.8 ms,放大倍数k1=8.5;第二级滤波器:时间常数T2=4.7 ms,放大倍数k2=3;因一阶滤波器相当于一阶惯性环节,其数学模型为K(1+Ts)。
故本级的数学模型是:

3)PID校正电路。根据系统固有的开环幅相频特性,在作出期望的理想频率特性的基础上,减去其固有特性,即得出校正模块的对数相频特性,据此可得本级的数学模型为:

τ1=0.034 s,τ2=0.31 s,Tr1=1.2 s,Tr2=0.004 85 s。
4)脉宽调整与功率放大电路。脉宽调整与功率放大电路可近似看作一个比例环节,其比例系数为:

5)电磁恒装。设电磁恒装在最大力矩时对应的滑速差为nsm,当滑速差ns<nsm时,系统稳定,其对数幅相频特性一一对应;当ns>nsm时,系统不稳定,其对数幅相频特性不对应。但考虑ns>nsm恰是高空常出现的一种正常状态,故本级数学模型为

式中:Kbr、Td、TM均随发动机转速和负载的变化而变化。
6)转速频率比例系数。在误差允许范围内电磁恒装输出的转速经交流发电机转换为频率,其转速频率比例系数为

分析式(1)~(6)并根据系统工作原理及各个环节之间的信号传递关系,得出频率调节环路总的数学模型如图2所示。

图2 频率调节环路结构图
3 变参数仿真与动静态特性分析
3.1 变参数仿真
在建立系统数学模型的基础上,本文采用MATLAB 语言的矩阵运算、图形绘制、信号处理和仿真等功能,对某型发动机的中转速中负载状态下频率调节环路的参数k1、k2、k3、k4、k5的变化进行仿真研究。某型发动机在中转速、中负载状态下频率调节环路的结构图如图3所示。

图3 中转速中负载系统结构图
图(3)中G(s)为:

由控制理论可知,系统的开环增益k1、k2、k3、k4对系统的影响实质是一致的,只因数值的不同而相差一个比例系数,影响范围有所不同而已。而系统的反馈系数k5的变化对系统动态特性的影响与k、k2、k3、k4对系统的影响完全不同。本文按兼顾全面、突出重点的原则,选择具有代表性的滤波整形放大电路第一级滤波器放大倍数k1和频率敏感电压变换传导系数k5进行变参数仿真。
1)变滤波整形放大电路第1 级滤波器放大倍数k1。取k2=3、k3=33.5、k4=0.1、k5=0.002 5,选择不同的k1值,通过MATLAB 中Simulink 工具,得出系统阶跃响应曲线如图4所示[5-7]。

图4 k1 变化时系统阶跃响应曲线
2)变频率敏感电压变换传导系数k5。取k1=8.5、k2=3、k3=33.5、k4=0.1,选择不同的k5值,通过MATLAB中Simulink工具,得出系统阶跃响应曲线如图5所示。

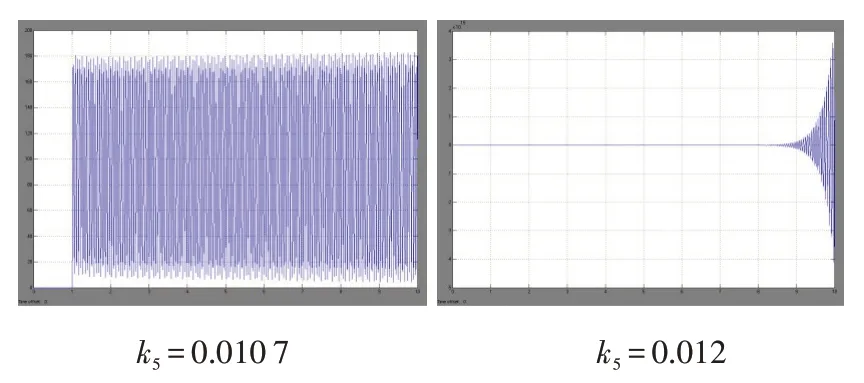
图5 k5 变化时系统阶跃响应曲线
3.2 动静态特性分析
对该系统动静态特性的要求是(只讨论时域部分,频域部分略):超调量σ≤17.5%、调节时间为ts≤15 s、峰值时间tp≤2 s。
1)变k1的动静态特性分析。根据图4 中变k1仿真的各响应曲线,结合系统动静态指标要求,得出其仿真结果如表1所示。
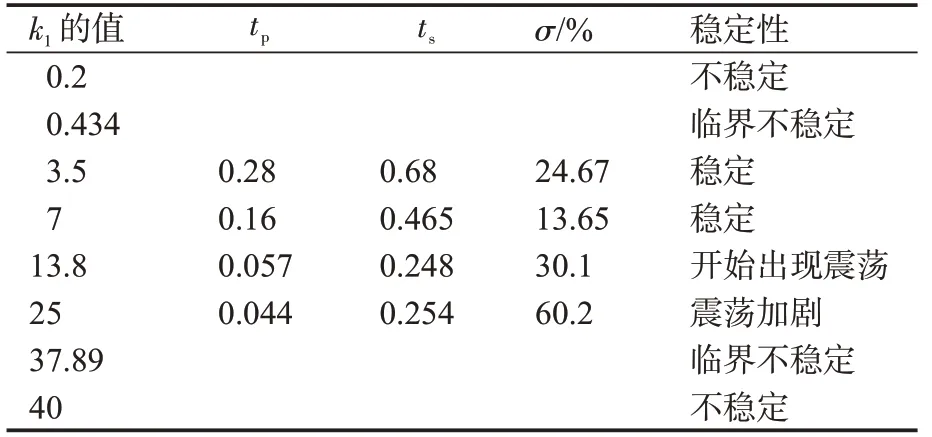
表1 中转速中负载状态下变k1 仿真结果
由表1 可知,在0.434 <k1<37.89 范围内,系统是稳定的。当k1由0.434向37.89逐渐增大时,峰值时间tp逐渐减小而调节时间ts先减小后稍微增大;超调量先减小后又急剧增大,k1在3.5~13.8之间时σ较小,当k1≥13.8 时,系统开始出现震荡,并逐步加剧,直至不稳定。
2)变k5的动静态特性分析。根据图5,变k5仿真的各响应曲线,结合系统动静态指标要求,得出其仿真结果如表2所示。

表2 中转速中负载状态下变k5 仿真结果
由表2 可知,在0.000 122 5 <k5<0.010 7 范围内,系统是稳定的。当k5由0.000 122 5向0.010 7逐渐增大时,峰值时间tp逐渐减小而调节时间ts先减小后逐渐增大;超调量σ先减小后又急剧增大。
4 结论
k1适当增大可提高系统的反应速度,但k1过大则系统不稳定。k1在7附近取值时,系统具有最佳的动静态特性指标。
系统对k5的变化异常敏感,且k5的微小变化对系统的动静态特性的影响十分明显。因系统参数稍有变化,经过数级整形放大后其影响非常大,甚至导致系统不稳定,因而在设计和使用过程中,应对该部分电路加以注意。设计时应尽量采取措施使k5稳定在0.002附近,而在使用过程中应注意检测该部分电路的完好情况,以防器件损坏等影响系统的动静态特性。
k5在0.002附近时具有最佳的动静态特性。
[1] 刘爱元,卢建华,杨秀珍,等.飞机电源与电气控制[M].北京:海潮出版社,2008:106-141.
LIU AIYUAN,LU JIANHUA,YANG XIUZHEN,et al.Aircraft power supply and electric control[M]. Beijing:Haichao Press,2008:106-141.(in Chinese)
[2] 刘慧英,姚远,张国春.飞机电源系统保护控制的仿真研究[J].控制工程,2010,17(2):135-138.
LIU HUIYING,YAO YUAN,ZHANG GUOCHUN.Simulation of protection control of aircraft power supply system[J]. Scientific Journal of Control Engineering,2010,17(2):135-138.(in Chinese)
[3] 马印才,王春平,贾占强. 二阶PID 电路状态观测器MATLAB 实现[J].科学技术与工程,2009,7(19):5089-5090.
MA YINCAI,WANG CHUNPING,JIA ZHANQIANG.Accomplish of state observer for one of two order pid circuit by MATLAB[J]. Science Technology and Engineering,2009,7(19):5089-5090.(in Chinese)
[4] 洪陆合,吴顺祥.基于Matlab/GUI 的逆变电路故障仿真研究[J]. 厦门大学学报:自然科学版,2010,49(3):324-327.
HONG LUHE,WU SHUNXIANG. Research on simulation for inverter circuit under fault conditions based on Matlab/GUI[J]. Journal of Xiamen University:Natural Science,2010,49(3):324-327.(in Chinese)
[5] 韦莉,张逸成,沈玉琢,等.基于MATLAB的大功率电源系统的建模与仿真[J].系统仿真技术,2009,5(3):202-207.
WEI LI,ZHANG YICHENG,SHEN YUZHUO,et al.Modelling and simulation of high power system based on MATLAB[J].System Simulation Technology,2009,5(3):202-207.(in Chinese)
[6] 刘建英.基于MATLAB的飞机电源系统仿真[J].中国民航学院学报,2004,22(6):91-92.
LIU JIANYING.Simulation for aircraft power supply system based MATLAB[J]. Journal of Civil Aviation university of China,2004,22(6):91-92.(in Chinese)
[7] 高朝晖,张晓斌,吴小华.基于MATLAB 的飞机高压直流电源系统数字仿真[J]. 系统仿真学报,2003,15(4):564-567.
GAO ZHAOHUI,ZHANG XIAOBIN,WU XIAOHUA.Simulation of high voltage direct current aircraft electrical power generating system based on MATLAB[J].Journal of System Simulation,2003,15(4):564-567.(in Chinese)
[8] 薛定宇. 基于Matlab/Simulink 的系统仿真技术与应用[M].北京:清华大学出版社,2002:192-220.
XUE DINGYU. Technology and application for system simulation based Matlab/Simulink[M]. Beijing:Tsinghua University Press,2002:192-220.(in Chinese)
[9] 刘爱元.恒频交流电源频率调节系统动静态特性研究[J].计算机仿真,2003,20(6):108-110.
LIU AIYUAN. Research on dynamic and static characteristic of frequency modulation system for constant frequency AC power supply[J].Computer Simulation,2003,20(6):108-110.(in Chinese)
[10]沈颂华.航空航天器供电系统[M].北京:北京航空航天大学出版社,2005:2-20.
SHEN SONGHUA. Power supply system for aeronautics and astronautics[M]. Beijing:Beihang University Press,2005:2-20.(in Chinese)
