基于群组的WI-FI指纹室内定位研究
2013-03-16李树军于建江
李树军 ,于建江
(1.盐城师范学院 信息科学与技术学院,盐城 224002;2.南京大学 软件学院,南京 210093)
全球定位系统GPS(Global Position System)是目前应用最广泛最成熟的定位系统。GPS通过卫星授时和测距对用户进行定位,具有定位精度高、实时性好、抗干扰能力强等优点。但是GPS只适用于无遮挡的室外环境,在室内环境中存在较大的误差。近年来,很多高校和研究机构对室内定位技术进行了研究,提出了 TOA[1]、TDOA[2]、AOA[3]、WI-FI RSSI指纹[4]等算法。
基于WI-FI信号强度(RSSI)的指纹识别(Fingerprinting)定位是目前室内和室外城市密集区的重要定位算法之一[5,6]。与其它定位算法相比,WI-FI RSS指纹定位存在很多优点。首先,WI-FI指纹定位成本低廉。它利用室内环境中已经存在的WI-FI接入点实现定位,而AOA等算法需要在室内环境中部署特殊的硬件设备。其次,WI-FI RSSI指纹定位可以使用大众化的智能手机实现无所不在的定位。最后,WI-FI指纹定位原理以及计算过程都非常简单。但是由于室内环境比较复杂,无线信号在室内环境极不稳定,WI-FI RSSI指纹定位存在较大的误差,这已成为RSSI指纹定位技术商业化的瓶颈,当前,国内外的研究热点集中在如何提高RSSI指纹定位的精度[7]。
在室内环境中(如商场、电影院),人们总是喜欢结伴而行,形成一个群组。群组成员之间的物理距离通常较近,但是通过WI-FI RSSI指纹定位计算出来的位置可能相差较远,与现实的情况不符。基于以上观察,本文提出了基于群组的WI-FI RSSI指纹定位算法,利用群组成员相互之间的物理距离来提高WI-FI RSSI指纹定位精度。
1 相关工作
WI-FI RSSI指纹定位分为离线训练和在线定位两个阶段。如图1所示,假设在室内环境中存在{AP1,AP2,AP3…APN}N 个 WI-FI无线接入点。离线训练阶段,首先在室内均匀地选取P={P1,P2,P3…PM}M个点(如图1中的训练点所示),其坐标分别为{( x1,y1),(x2,y2),(x3,y3)…(xM,yM)} ;然后,分别在每个点Pi(1≤i≤M)处采集各个AP的信号强度作为该点的指纹,记为RSSi=(RSSi1,RSSi2…RSSij…RSSiN),其中RSSij是点 Pi处接收到APj的信号强度值;最后,将每个点的坐标和指纹{(xi,yi),(RSSi1,RSSi2…RSSij…RSSiN),1≤i≤M }存入数据库。在线定位阶段,首先在待定位的地方获取每个AP的信号强度值(S1,S2,S3…Si…SM),其中Si为接收到APi的信号强度值;然后采用公式(1)计算待定位处RSS向量与数据库中各点RSS向量之间的距离。

其中1≤i≤M,w取大于0的整数。最后根据上面的结果估计待测位置的坐标,通常的做法是采用神经网络、最近邻法(NN,Nearest Neighborhood)、K最近邻算法[8,9](KNN,K Nearest Neighbor)等。比较为业界所认可的是采用K最近邻算法,即选取K个距待测位置最近的点,按式(2)计算待测位置的坐标。

虽然存在很多优点,但是室内环境比较复杂,受室内物理以及来往行人的影响,信号传播会发生反射、衍射和散射,因此信号强度RSSI值会存在一定程度的波动。信号强度值的波动导致WI-FI指纹定位的误差较大,约为6~8m。近年来,大量工作都在探索如何减小WI-FI RSSI指纹定位的误差。
2 基于群组的定位
2.1 算法概述
人是一种群居动物,喜欢结队出行。比如在商场,男女朋友总是习惯手挽着手一起狂街。多个相互熟悉的人同时在室内行走时,通常会形成一个小组,我们称之为群组。在群组之内,人与人之间相隔很近,或者是前后相差一步,或者左右相差一步。本论文利用群组中人与人之间的这种物理间隔来减小WI-FI指纹定位的误差。
如图1所示,A,B,C,D是四个一起行走的好友,前后左右相差0.5m(一步的距离)。他们形成了一个群组。由于WI-FI指纹定位存在较大的误差,A、B、C、D通过定位算法计算出来的位置分别为A′、B′、C′、D′,不同程度地偏离了各自准确的位置。然而A′、B′、C′、D′四个点构成的形状不满足A、B、C、D四个人之间的物理距离。我们可以利用A、B、C、D之间的物理距离来修正WI-FI指纹定位的误差。
利用群组来提高WIFI指纹定位的精度分为两步。首先是群组的识别,本文通过编辑距离识别不同的群组;然后利用群组之间的物理距离计算群组成员的实际位置。
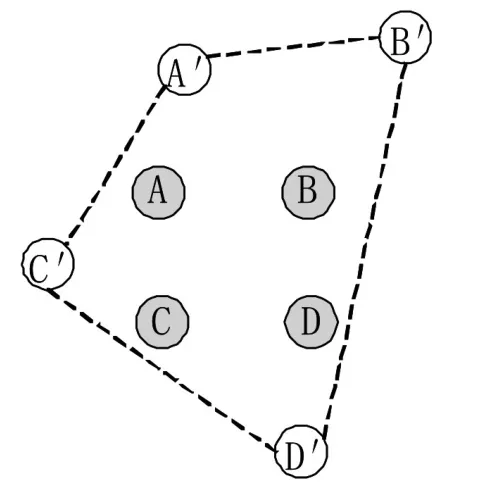
图2 多人定位误差
2.2 基于编辑距离的群组识别算法
最小编辑距离[6]是指两个字符串之间,由一个转成另一个所需要的最少编辑操作次数,允许的编辑操作包括:将一个字符替换成另一个字符,插入一个字符或者删除一个字符。最小编辑距离是一种衡量两个序列相似性的度量方法。
近年来,随着智能手机的普及,传感器设备已经无处不在。普通的智能手机上存在8、9种传感器,包括GPS、方向传感器、加速度传感器、温度计、环境光传感器等。本文利用智能手机上的加速度传感器和方向传感器发现群组。
在室内环境中,存在很多地方能够引起智能手机上传感器读数的强烈变化,我们将这些变化称之为事件。在电梯中,加速度传感器能够监测到电梯启动和停止导致的超重和失重,如图3所示。在室内的转角处,方向传感器随着人的身体发生转动,其读数也随着出现较大的波动,如图4所示。
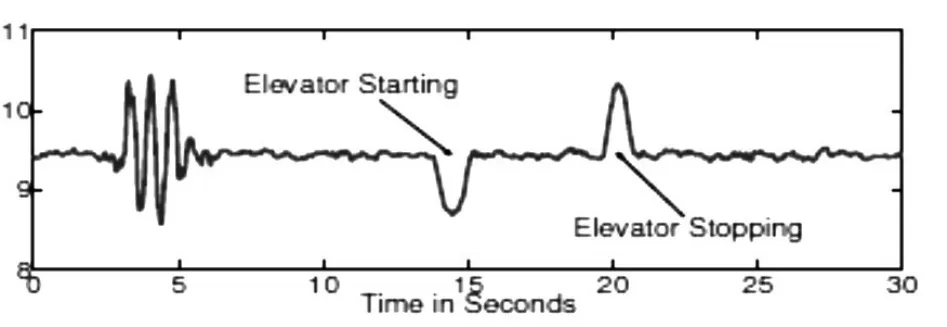
图3 电梯中加速度传感器的变化值
设智能手机能够监测出的事件集合为S,其中S={E1,E2,E3,E4}。E1,E2,E3,E4分别表示超重、失重、向左转和向右转。在室内行走时,记录下监测到的事件。一段时间后,会形成由E1,E2,E3,E4组成的事件序列。如果两个人属于同一个群组,他们所监测到的事件序列会有很高的相似度,同时,通过WI-FI指纹定位算出的结果应大致处于同一个区域。

图4 方向传感器在转角处的读数变化
设A,B两人监测到的事件序列分别为traceA和traceB,通过WI-FI指纹计算的位置分别为A′、B′。我们通过下式判断A,B两人是否属于同一群组:

其中dis( A′,B′)为 A′和 B′的欧式距离,MED(traceA,traceB)为traceA和traceB之间的最小编辑距离,θ为阈值。当不等式成立时,A、B属于同一个群组,否者不属于一个群组。两个事件序列最小编辑距离算法的伪代码如下:

2.3 基于群组定位算法
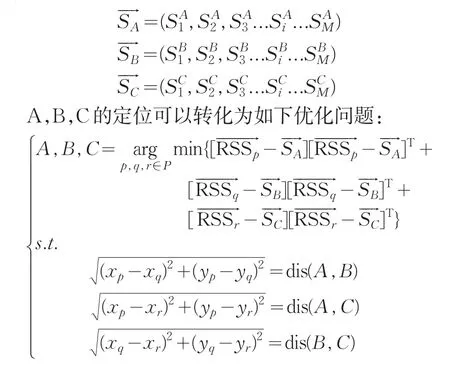
在识别群组后,我们通过群组成员之间的物理距离修正WI-FI指纹定位产生的误差。为简化说明,假设一个群组中成员为A、B、C。A、B、C监测到的事件序列分别为 traceA,traceB和 traceC。traceABC为traceA、traceB、traceC的最大公共子序列。则A、B、C之间的距离可通过下面的式子估算。

其中L是traceABC最大公共子序列的长度,分别是A、B、C监测到traceABC中第i个事件的时间,ρ为人的步行速度。
设A,B,C采集到的WI-FI信号强度M个AP的信号强度向量分别为:
3 实验分析
为了验证算法的有效性,本文在智能手机上实现了定位算法,并在如图5所示的室内环境中进行了测试。

图5 实验环境
实验总共部署了15个AP,均匀分布在室内环境中。每平方米内,我们选取一个点进行WI-FI指纹训练。在线定位阶段,手持智能手机,分别组成2/3/4/5/6人群组,在室内各进行100次测试。群组识别的准确性如表2所示。

表2 群组识别正确率
基于群组的WI-FI指纹定位和WI-FI指纹定位算法的误差累计分布如图6所示。从图中,可以看出基于群组的WI-FI指纹定位算法能够明显地减小WI-FI指纹定位的误差。

图6 定位误差累计分布
4 结论
室内定位是位置感知计算和基于位置的服务的基础。WI-FI指纹定位是最常用的室内定位算法之一。但由于室内环境较复杂,无线信号的传播存在反射、衍射和散射,WI-FI指纹定位存在较大的误差。本文设计和实现了一种基于群组的WI-FI指纹定位算法。该算法利用群组成员之间的物理距离减小WI-FI指纹定位的误差。实验表明,该算法能够有效地提高WI-FI指纹定位的精度。
[1]Guvenc I,Chong C C.A survey on TOA based wireless localization and NLOS mitigation techniques[J].Communications Surveys&Tutorials,IEEE,2009,11(3):107-124.
[2]Musicki D,Kaune R,Koch W.Mobile emitter geolocation and tracking using TDOA and FDOA measurements[J].IEEE Transactions on,Signal Processing,2010,58(3):1863-1874.
[3]Chang A C,Chang J C.Robust Mobile Location Estimation Using Hybrid TOA/AOA Measurementsin CellularSystems[J].WirelessPersonal Communications,2012,65(1):1-13.
[4]Yang Q,Pan S J,Zheng V W.Estimating location using wi-fi[J].IEEE Intelligent Systems,2008,23(1):8-13.
[5]孟磊,丁恩杰,冯启言,等.基于Wi-Fi与WebGIS的井下移动目标定位与历史轨迹提取[J].地理与地理信息科学,2012,28(3):109-110.
[6]刘晓文,张秀均,郝丽娜,等.基于WI-FI的井下定位算法研究[J].传感技术学报,2012,25(6):854-858.
[7]Fang S H,Wang C H.A dynamic hybrid projection approach for improved Wi-Fi location fingerprinting[J].IEEE Transactions on,Vehicular Technology,2011,60(3):1037-1044.
[8]Weinberger K Q,Saul L K.Distance metric learning for large margin nearest neighbor classification[J].The JournalofMachine Learning Research,2009,10:207-244.
[9]Triguero I,Derrac J,Garcia S,et al.A taxonomy and experimental study on prototype generation for nearest neighbor classification[J].IEEE Transactions on,Systems,Man,and Cybernetics,Part C:Applications and Reviews,2012,42(1):86-100.
