从Pleiades剖析新一代高性能小卫星技术发展
2013-03-11朴永杰
徐 伟,朴永杰
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
1 引言
随着遥感信息应用领域的不断扩大和遥感技术的不断发展,商用遥感卫星凭借其不断提高的时间分辨率、空间分辨率及光谱分辨率特性,具有越来越广阔的应用前景。
近代商用高分辨率遥感卫星颇具典型代表的有 美 国 DigitalGlobe公 司 的 QuickBird,WorldView-1,WorldView-2卫星和GeoEye公司的IKONOS,GeoEye-1,GeoEye-2 卫星(0.25 m 分辨率,在研),这些卫星相机拍摄的地球表面图像的像元分辨力都优于1m,最高已达到了0.41 m[1-3]。法国的 SPOT 系列卫星是世界上最早,也是以商业模式运作最为成功的遥感卫星,但其SPOT卫星系列主要面向大幅宽应用场合,分辨率一直不是很高。进入21世纪,面对日益激烈的竞争压力,为争夺高分辨率卫星影像市场,法国和意大利合作研发了Pleiades系列卫星作为SPOT系列卫星的性能补充,首颗Pleiades-1卫星已于2011年12月17日成功发射,其具有0.5 m超高空间分辨率且幅宽达到了20 km。
较之美国的同类卫星,Pleiades凭借其独特的技术特点脱颖而出,受到全世界航天研发机构的关注。本文将详细总结Pleiades的技术特点并加以深入剖析,进而揭示未来商用高分辨遥感卫星技术的发展方向。
2 Pleiades指标及性能概况
Pleiades是一种便捷、灵巧的高分辨率光学遥感卫星,如图1所示。
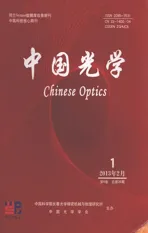
为了适应对地观测的发展需要,研制者对Pleiades卫星进行了全新设计,对传感器也进行了较大的调整,一方面继续保持了SPOT系列卫星在波段设置、立体成像、星座运行等方面的特点,另一方面重新设置了空间分辨率、观测灵活性以及数据获取模式等,使其具有更高的技术水准。与SPOT系列卫星相比,Pleiades卫星是灵巧型卫星,重量为1 t,太阳能帆板和锂离子电池为卫星提供1500 W的能量。不同于传统卫星平台与载荷层层叠放的构型方式,Pleiades以载荷为中心进行整星布局的构型设计,打破了载荷与平台的界限,尽量互相结合,减少构件,达到简化、多用与高度集成。表1为Pleiades卫星的主要参数。

图1 Pleiades在轨运行Fig.1 Pleiades in orbit
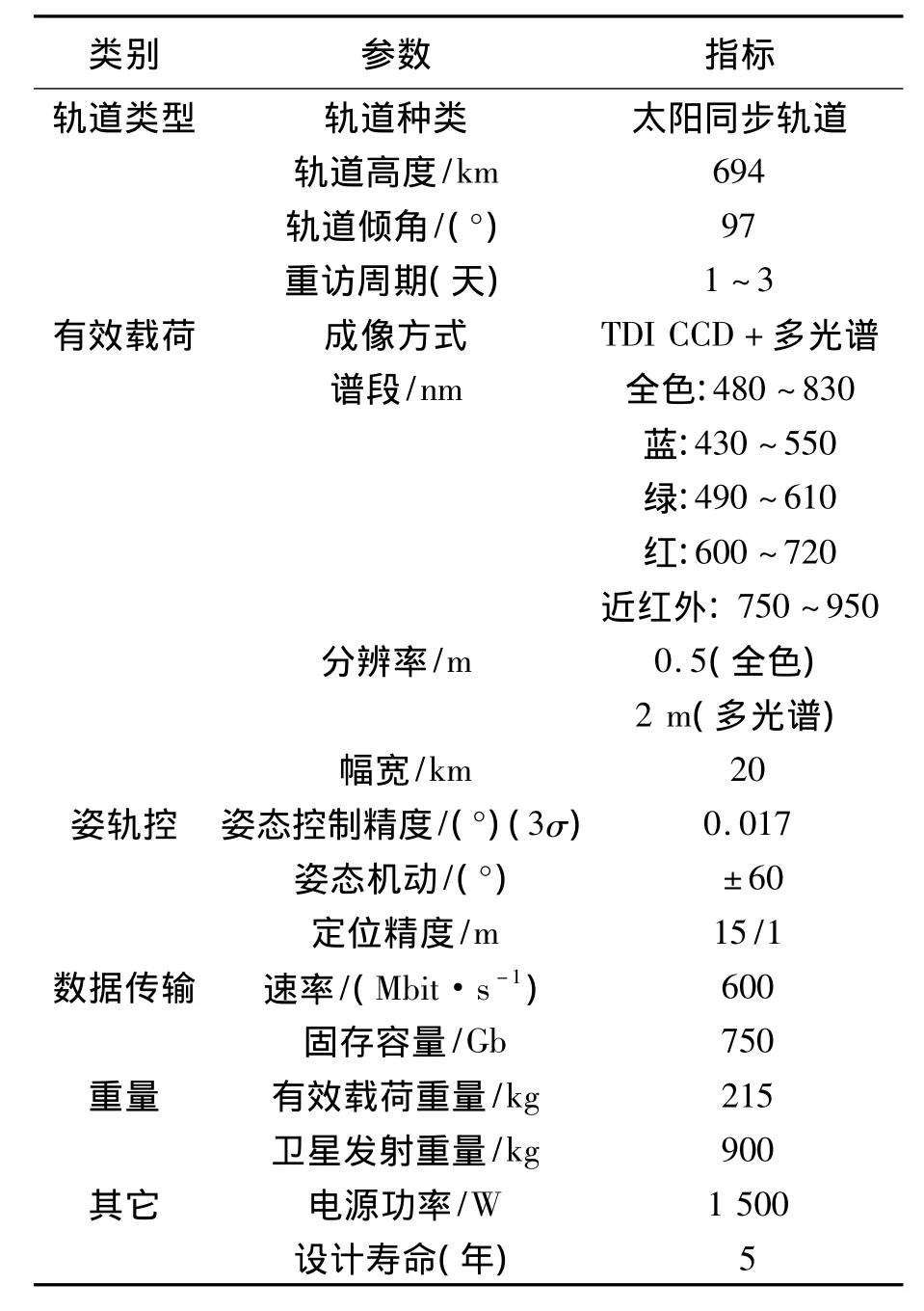
表1 Pleiades卫星的主要参数Tab.1 Main parameters of the Pleiades
在姿态控制和侧视能力方面,Pleiades卫星采用控制力矩陀螺作为执行机构,使卫星整体绕滚动轴、俯仰轴大角度侧摆,可灵活地实现对不同目标的观测。同时,依靠其强大的姿态机动速度,既可以对点状目标进行成像,也可以沿飞行轨迹向前或向后成像,生成近似同时的立体像对。在一个轨道周期内,Pleiades卫星可以对1 000 km×1 000 km区域内的20个φ 20 km的点状目标进行瞬时观测,也可以对100 km×200 km范围内的目标进行多次重访拍照,其灵活的成像模式如图2所示。
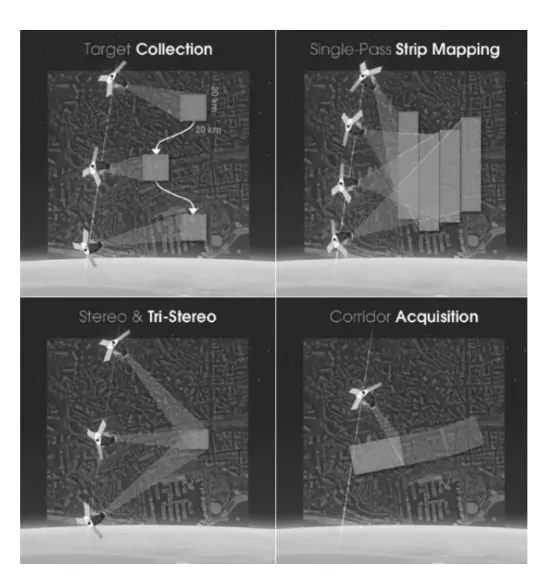
图2 Pleiades卫星成像模式示意图Fig.2 Imaging mode of the Pleiades
3 Pleiades卫星技术剖析
3.1 多星组网轨道设计
目前,从公布的计划上看Pleiades有2颗卫星[4],其中 Pleiades1正运行于距地球694 km的太阳同步回归轨道。由于是商业化高分辨卫星,其轨道并未选用天回归目标侦查轨道,轨道分析表明,其回归周期长达26天,但借助其整星强大的侧摆能力,Pleiades1具有在极短的时间内提供精确空间信息的新功能以及非凡的接收能力,一个轨道周期最多可以拍到50个图像序列,每天可接收超过500幅照片,5个接收计划和3个每日定点监测计划,同时可在短时间内迅速获取全球的观测数据。随后,Pleiades2也将加入到相同的轨道中,并与1号卫星相位差180°,形成一个可对任意点每日观测的卫星星座。Pleiades在不同侧摆情况下,其重访能力如表2所示。
表2 Pleiades卫星重访能力Tab.2 Revisiting capability of the Pleiades
另外,通过包括紧急编程任务和地面站直接指令任务在内的灵活的任务服务,Pleiades可获得近于实时的高分辨图像和立体像对。
3.2 同轴偏视场TMA光学系统设计
Pleiades高分辨相机光学系统焦距达到12 905 mm,为减轻相机结构的体积和质量,设计采用同轴三反系统(TMA),主镜尺寸为650 mm,如图3所示,其主镜与次镜的安排类似于传统的卡塞格林系统,成像视场角小的缺点可通过灵活的编程任务和快速的机动能力进行弥补。
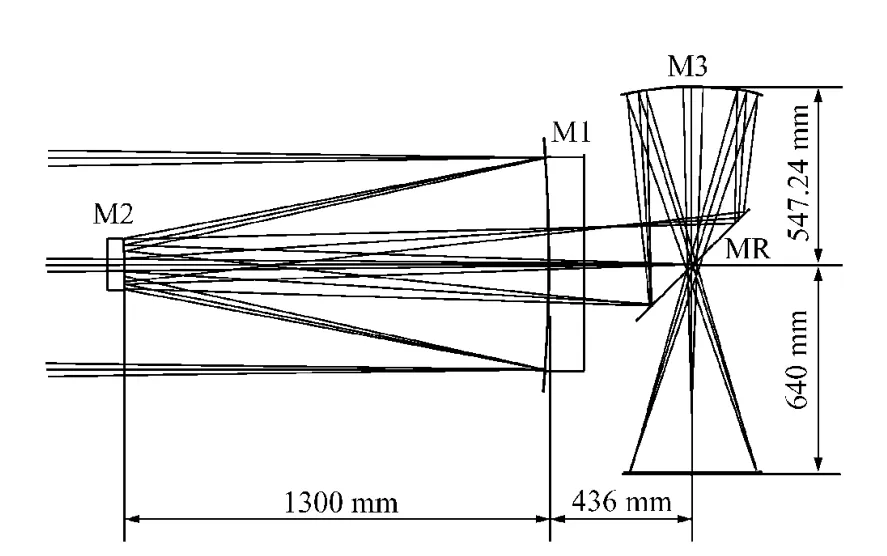
图3 Pleiades光学系统Fig.3 Optical system of the Pleiades
TMA光学系统的特点是[5]:
(1)用小折返镜改变光路,结构简单,质量轻,功能密度大;
(2)像差校正良好,无色差;
(3)宽波段和好的空间环境适应性,空间防护性较好;
(4)无一次杂光,易设内光阑,有中间像,消杂光处理容易。
此外,光学系统设计除满足分辨率与幅宽要求外,还要满足足够的信噪比(SNR)和传递函数(MTF)的要求。信噪比与光学系统相对孔径的平方成正比,增大相对孔径对信噪比是有利的,但相对孔径大时,相机的口径、尺寸及重量也将增大,所以Pleiades未采取该方式,其F数设计高达20(相对孔径仅为1/20),尽管较大F数会带来信噪比和全波段平均MTF的下降,但其通过采用大尺寸像元时间延迟积分CCD(TDICCD),并增加积分级数来弥补这种影响,实现光学系统最优化设计。最终,Pleiades地面装调完成的光学系统波前差达到λ/20,在轨测得传递函数为0.08,信噪比为90。
从Pleiades的光学系统设计还不难发现,F数高达20的空间相机光学系统在国外已经发展多年,技术应用已经成熟[6]。但国内由于高质量电子学电路及图像后处理技术相对落后,目前光学相机指标设计相对保守,F数大多在10左右,重量及体积均不占优势。
3.3 一体化超分辨焦平面
Pleiades成像单元设计独具特点,集视频信号的预放、视频信号的数字化(其中包括了视频信号的处理)、探测器低噪功放、极化产生电路、探测器时钟驱动、同步接口、命令控制接口等众多功能于一身,功能强大,高度集成。其焦平面选用5片13 μm全色TDICCD和5片52 μm四线阵多光谱CCD,各探测单元均为6 000 pixel,均采用12 bit编码方式,Pleiades焦平面设计如图4所示。
为在现有像元尺寸传感器的基础上实现高分辨率成像,Pleiades采用了亚像元拼接的方式进行超分辨焦平面设计,将两个CCD芯片的像元在线阵的排列长度方向上用光学的方法使之相互错位1/2个像元,此种方式可在积分时间不变的情况下,提高地面像元分辨率(GSD)至原来的,即达到:

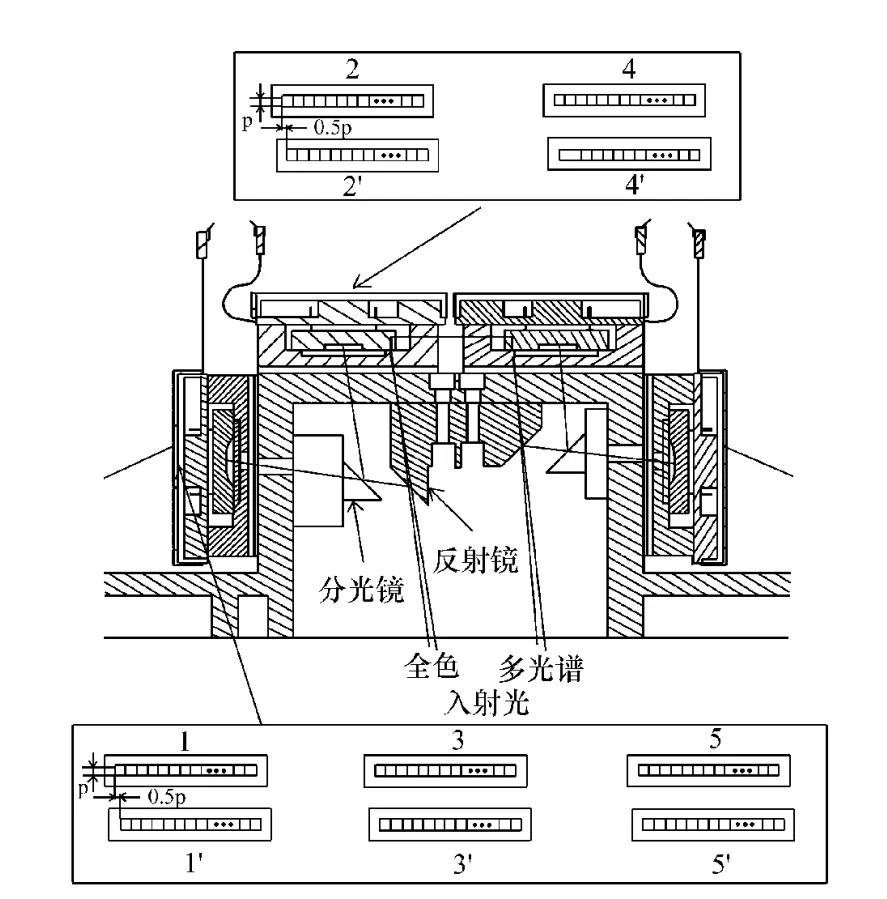
图4 一体化超分辨焦平面Fig.4 Integrated super-resolved focal plane of the Pleiades
Pleiades在实现优于0.5 m分辨率的同时,由于焦平面局部传感器数量的增多,使得传感器驱动预放电路规模及复杂度也相应提高,因此Pleiades不得不采用复杂的分光技术分解焦平面,将全色和多光谱分解为两部分以实现视场拼接。目前我国超分辨技术应用研究已取得了初步成果,但基于分光原理的复杂焦平面设计与应用还未在轨验证。
3.4 一体化综合电子学
Pleiades采用整星电子学系统一体化设计理念,以综合管理单元OBMU为核心,通过统一的接口和1553B总线与星上设备直接相连,由它进行统一管理、监视,这样OBMU便将传统的各个系统的下位机无论从结构上还是功能上都集成为一体,如图5所示。
OBMU是ASTRIUM公司为低轨道卫星开发的星上电子设备统一管理单元,可以搭载于多种不同任务的卫星上并根据不同的任务可以有不同的配置方式,该设备由以下几种模块构成[9]:
VPM:SPARC架构主处理器模块,负责控制BIM和外部1553B总线;
BIM:OBMU模块之间的通讯总线;
TIF:遥测、遥控模块,负责星地间通信;
IOS:安全模式控制模块,负责卫星在安全模式下的姿态、电源控制;
IOC:统一I/O模块,负责外部设备与OBMU的接口。

图5 一体化综合电子学Fig.5 Integrated electronics of the Pleiades
从OBMU硬件配置上看,其除了可完成常规星务管理任务外,还承担着有效载荷管理、姿态与轨道控制、热控及电源管理以及遥测遥控星地链接等任务。与国内卫星研制按各分系统划分,每个分系统均含独立单机不同,Pleiades真正实现了整星的一体化管理,其优势在于:
(1)资源整合,减少单机及元器件数量;
(2)指令整合,减少指令类型及转发环节;
(3)遥测整合,减少冗余遥测提高带宽;
(4)功能整合,减少测试环节和流程;
(5)性能整合,降低设备大小及功耗;
由此可见,一体化综合电子学技术是未来航天电子学系统设计的必然发展方向。
3.5 敏捷姿态控制系统
Pleiades在继承了SPOT系列卫星的许多优点的同时,具有更高的空间分辨率和更高的时间分辨率,这就要求卫星具备高指向精度、高姿态稳定度以及快速的机动能力。因此Pleiades采用了大量技术指标先进的姿态敏感器及执行机构,包括星敏感器、光纤陀螺和控制力矩陀螺等[10-11]。
(1)星敏感器
Pleiades采用了 3个 Sordern公司生产的SED-36型高精度星敏感器,其精度达到了1″(3σ),并且最大工作角速度达到 10(°)/s,这保证了Pleiades的超高稳态指向精度及姿态快速机动时的控制精度。国内目前尚无角秒级的星敏感器产品,精度优于10″的星敏感器都基本依赖进口。

图6 Pleiades控制系统关键部件Fig.6 Key components of control system
(2)光纤陀螺
Pleiades采用了Astirum公司Astrix200型光纤陀螺产品,其常值漂移小于0.01(°)/h,随机噪声小于 0.000 2(°)/,寿命大于5年,因此Pleiades的角速度确定精度可以优于0.0001(°)/s。这保证了Pleiades超高的姿态稳定精度及姿态机动过程中的角速度控制精度。目前国内尚无0.000 1(°)/s精度的陀螺产品,并且陀螺的可靠性普遍较低。
(3)控制力矩陀螺
Pleiades采用4个Astrium-Teldix公司生产的单框架控制力矩陀螺,如图6所示,以金字塔构型安装作为其主要的姿态执行机构。每个控制力矩陀螺的角动量为15 N·m·s,单个SGCMG的最大输出力矩可达45 N·m,能保证Pleiades卫星具备快速的姿态机动能力。从文献[12]中可以看出,Pleiades采用的控制力矩陀螺其控制精度达到mrad级,使得输出力矩精度达到10-3N·m级,保证了整星的姿态控制精度及稳定度。目前,国内尚无此类产品。
4 高分辨卫星新技术发展趋势
上述内容对Pleiades技术进行了剖析,相关技术及设计理念值得我们深入研究并借鉴。除此之外,结合我国实际工程研发能力,仍需在高分辨卫星领域继续发挥创新能力,除在高精度单元部件上加以技术攻关之外还必须独辟蹊径解决更前沿的工程问题。
4.1 CMOS TDI模式成像
现阶段,航天领域高分辨成像主要采用TDI CCD。但由于受成像原理和硬件设计的限制,TDI CCD具有如下限制和弊端:
(1)只能动态推扫成像,实时调焦困难;
(2)严格的像移匹配,无法凝视成像;
(3)电源种类多,外围电路复杂,功耗大;
(4)仅能单向推扫成像,且无法自主调焦。
因此寻求空间高分辨成像的新型技术迫在眉睫。目前,CMOS传感器以系统集成度高、成本低、功耗小、抗辐照能力强等优点在空间光学展现出广阔的应用前景。
为使CMOS能够更适合空间高分辨力成像,需使其在面阵成像基础上具备TDI功能以提高图像的信噪比,目前借助于现场可编程门阵列(FPGA)强大的逻辑处理能力,该功能已经能够通过采用逐行叠加的卷帘数字域TDI算法得以实现[13]。具体实现算法如下:
以3级积分为例,逐行叠加的卷帘数字域TDI算法工作原理如图7所示。当进行推扫成像时,在第一个行周期,CMOS传感器输出像素矩阵P1,FPGA控制前3行数据写入存储器M中;经过一个行周期,传感器沿推扫方向移动一个像元宽度,并输出第二帧图像P2,此时线阵1对应的景物与前帧线阵2对应的景物相同,因此FPGA控制P2前3行数据与P1对应数据叠加后存入存储器;同理,第三个行周期,存储器M1中存储的是当前帧线阵1、前1帧线阵2以及前2帧线阵3对同一景物成像数据的叠加,存储器M2中为当前帧线阵2和前1帧线阵3成像数据的和,M3中暂存当前帧线阵3的成像数据。每个行周期M1数据叠加完成后,在FPGA控制下输出,此时3级积分输出信号为:
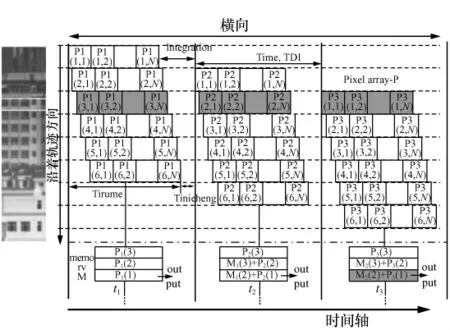
图7 卷帘数字域TDI原理图Fig.7 Principle diagram of rolling TDI in digital domain
Nsignal(3)=P3(1)+P2(2)+P1(3).
另外可通过面阵和TDI间的灵活切换,满足静态实时调焦和动态扫描成像两方面的需求,大幅提高成像系统的灵敏度和信噪比,轻松解决高分辨率凝视拍照难题。另外,利用FPGA可实现CMOS相机级数连续可调,解决了TDI CCD级数只能在固定几个数字内选择,往往得不到合适灰度的欠缺。
4.2 高动态范围视频成像技术
无论采用TDI CCD还是利用CMOS实现TDI功能,其成像技术还是以获取静态图像为主。目前随着国外开始发展的视频卫星在轨运行后,视频监视载荷所提供的视频产品具有动态直观、信息丰富等特点令人瞩目。与传统对地观测卫星相比,视频遥感卫星在具备对目标进行长时间的动态实时监测能力的同时,能够根据地面情况迅速改变观测地区和观测重点,更有利于突发事件的快速响应和灾害实时监视等。因此,部署并应用视频卫星将是航天遥感信息获取的重要发展方向。
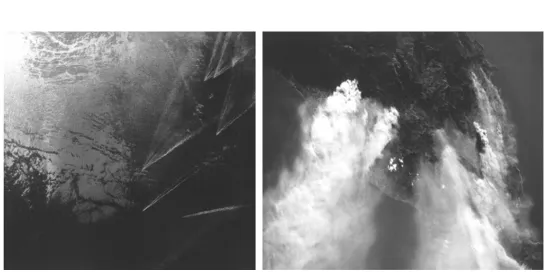
图8 TUBSAT在轨视频成像Fig.8 TUBSAT on-orbit video imaging
从文献[14]中可以看出,德国在视频卫星领域研究较早,其研制的TUBSAT卫星所拍摄的视频截图如图8所示。从获取的视频数据上看,其视频相机虽然在动态目标监视和灾害监测方面优势明显,但仍存在不能覆盖视场内场景动态范围的缺陷,即在一帧内同时出现过曝光和欠曝光,造成视频信息缺失。
因此,未来发展高分辨视频卫星必须解决高动态范围视频成像技术,以适应航天应用领域不同的光照条件。目前高动态范围图像获取方法主要有:多次曝光法、多靶面曝光合成、单像素集成多个感光单元、光学衰减器法等。出于对航天产品高稳定和高可靠方面的考虑,中科院长春光机所正在开展基于优化改进多次曝光技术的高动态范围视频载荷相关技术研究,将高帧频成像传感器输出的多帧低动态范围视频帧融合为一幅高动态范围图像,最终形成帧频大于25 frame/s的高动态范围视频序列[15]。高动态范围视频载荷关键技术及解决方法如表3所示。

表3 高动态范围视频载荷关键技术及解决方法Tab.3 Key technologies and solutions of high dynamic video
4.3 基于可重构模块的柔性化集成技术
传统大卫星功能丰富且系统复杂,分系统之间接口众多,常采用按需定制的研制方式,而现代小卫星由于受到研制成本和研制周期的制约,需重点研究并发展柔性化集成技术以避免大卫星小型化的做法,实现整星柔性化集成的优势在于:
(1)降低系统复杂程度,即插即用;
(2)减少设计、制造及测试周期;
(3)降低整星研制成本;
(4)增强适应性以满足不同功能需求。
国外在小卫星柔性化集成方面起步较早,90年代初美国宇航局(NASA)便提出了小卫星柔性化设计和集成公用模块理念,利用模块化、标准化、系列化和产品化的技术手段,实现了小卫星对突发事件快速信息获取的能力,并通过多颗ORS卫星的研制进行了技术验证。目前我国相关科研机构与高校也开始关注小卫星柔性化设计方法,其中哈尔滨工业大学提出的基于可重构模块实现整星柔性化集成引领了我国新型小卫星设计理念[16],符合我国国情并适应我国未来小卫星发展的需要。
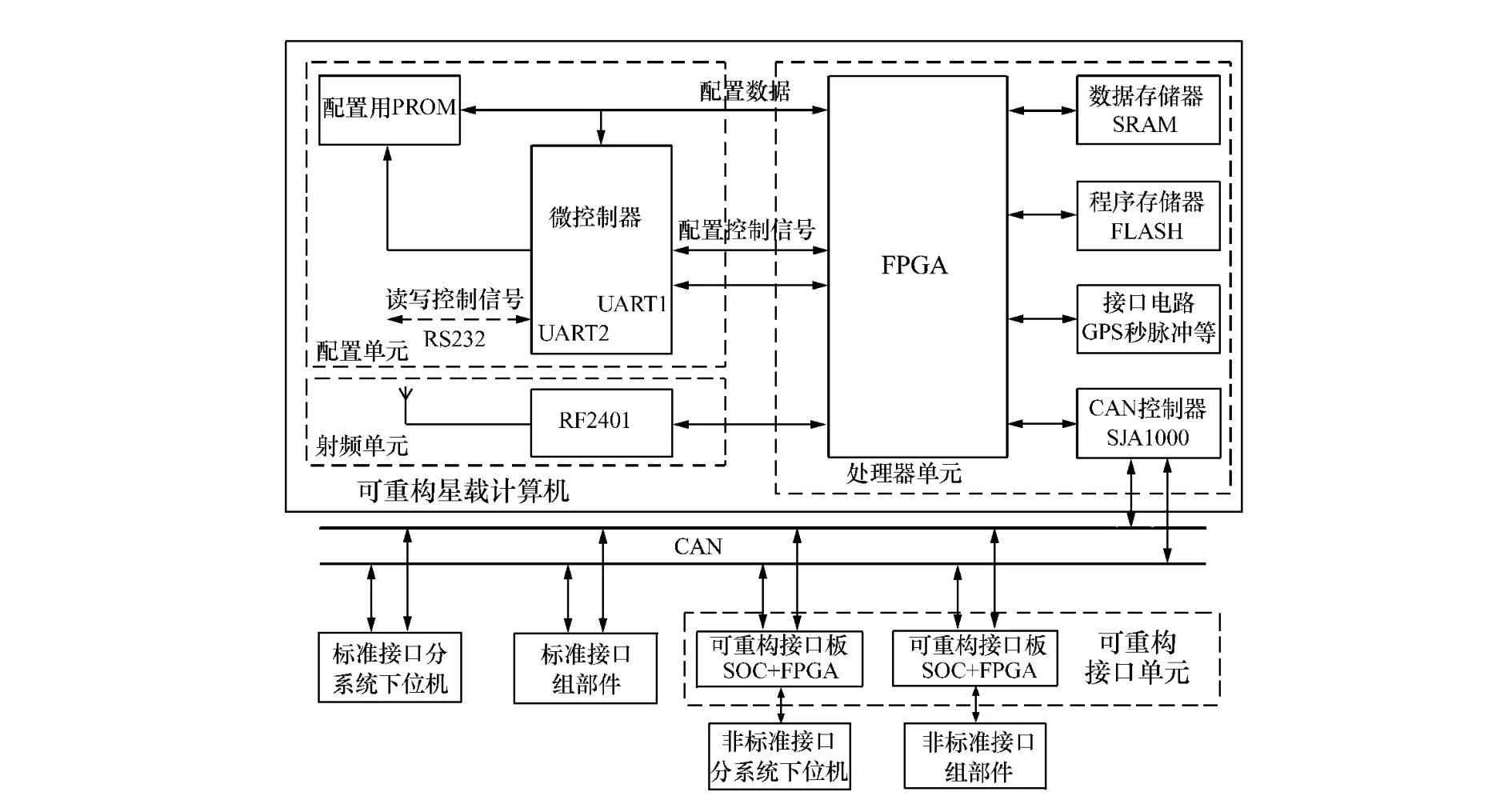
图9 可重构综合电子系统体系结构Fig.9 Structure of reconfigurable integrated electronic system
基于可重构模块建立的新型星上综合电子系统以可重构星载计算机为核心,通过选配可重构接口单元进行接口扩展,并辅以用于分系统或单机组部件间信息传输或交换的标准信息网络(如控制区局域网络总线(CAN)总线等)组成,可实现卫星的柔性化集成[17]。该新型综合电子系统具备通用性强(适合不同类型任务要求)和适应性广(适合不同接口部件集成)的特点,其体系结构如图9所示。其中,可重构星载计算机和可重构接口单元统称为可重构模块。
可重构星载计算机以FPGA为核心,可依据星上任务进程自主调整电路结构进而动态改变星上计算机功能,利用单一处理器资源分时复用实现多处理器功能可简化星上中心机配置数量和在轨升级机制,同时还在系统层增强了其对辐射损伤的应对能力[18]。
可重构接口单元同样以FPGA为核心,通过配置FPGA实现诸如RS422、AD、DA等非标准接口至标准CAN总线接口转换以及标准星上协议转换,便于非标设备及组部件的集成。
目前关于小卫星通用化、模块化、组合化的研究领域十分广泛,需投入精力更加深入细致地进行技术创新。
4.4 基于软件总线的星载软件设计技术
星载软件系统是由多个嵌入式软件子系统组成的,主要实现飞行任务管理、姿态控制、载荷管理及遥测遥控等功能。在当前卫星功能集成度不断提高的过程中,星载硬件发展较快,变化较大,而软件设计由于受飞行任务和硬件环境不同的影响逐渐暴露出可重用性差、开发和测试周期长以及无法快速集成等问题。为解决上述问题,最终实现软件动态的即插即用,采用软件总线技术已成为星上软件工程化研究的重点[19]。
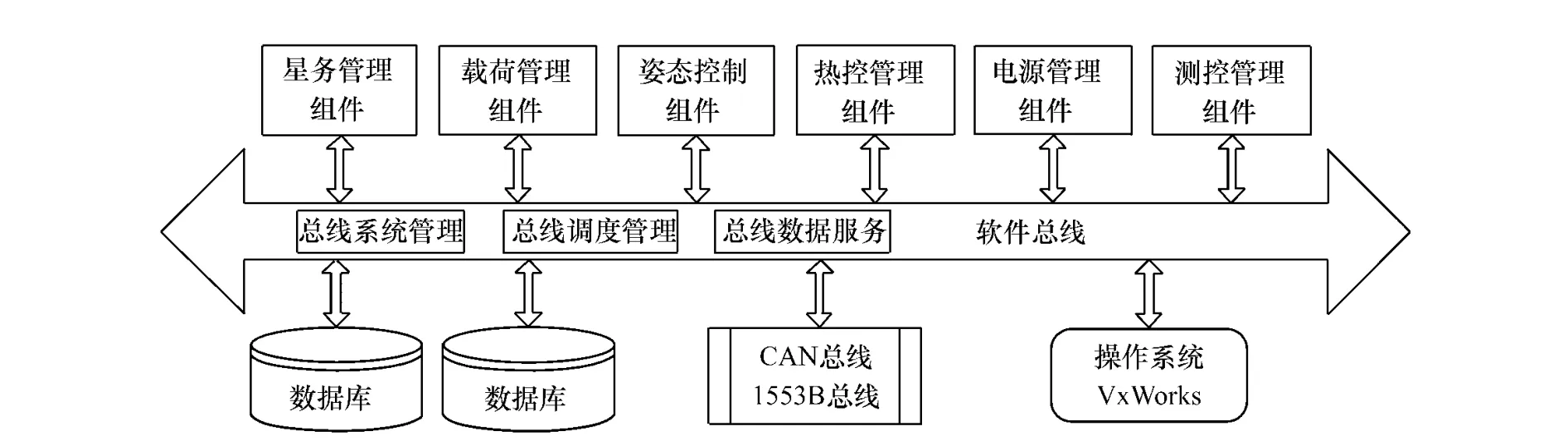
图10 基于软件总线的星载软件系统架构Fig.10 On-board software architecture based on software bus
基于软件总线的星载软件系统总体架构如图10所示。整个系统由外部数据接口、各功能组件、软件总线、数据库和实时多任务操作系统等组成。系统中挂接于软件总线上的各功能组件彼此之间相互独立,仅通过软件进行数据交互;软件总线又直接与底层实时多任务操作系统及外部数据接口相连。当卫星需依照具体任务要求动态产生增加或删除组件,只需通过配置总线系统管理模块中相关组件列表即可实现软件重构,从而快速完成系统软件开发工作。
软件总线设计思想是通过软件总线的系统管理、调度管理和数据服务实现外部数据的采集、组件的动态加载、组件间数据交换等功能,最终实现非耦合模式下各个组件的协同工作。其实现的核心技术是总线调度管理模块设计,通过该模块实现对各组件的调用、安装、卸载和完成对组件数据库的管理,并根据需要处理的数据流使用自身任务调度机制,将数据流不断传递至相应组件,驱动整个系统连续工作。
我国在软件总线方面的研究起步较晚,研究成果距航天应用还有一定距离。不过无论作为未来快速战术星应用还是实现卫星规模化、产业化快速生产,均需要软件快速集成,其中软件总线是有效的技术手段。
4.5 星载一体化设计技术
传统卫星一般由有效载荷和卫星平台构成。虽然卫星平台的使用可以避免不同卫星所需服务系统的重新研制,但是其针对性较差,包络空间和质量都较大,不适于高分辨小卫星的小型化和轻量化。而星载一体化是以载荷为中心,围绕载荷布局展开设计,在进行载荷和平台的设计时兼顾对方利益,通过采用光、机、热一体化设计与分析手段完成对整星结构参数的优化设计,使系统整体的性能最优。
目前,国外高性能卫星上已经广泛采用星载一体化设计,Pleiades即采用了这种以载荷为中心,围绕载荷进行布局的高度一体化的设计方法,如图11所示。其载荷主承力背板既是主镜的支撑结构,又是星上其他部件的安装底板,有效减轻了整星重量[20]。同时,Pleiades所采用的高精度星敏感器及陀螺头部均是与载荷的主承力背板以及CCD焦平面组件进行统一设计安装,以保证姿态测量系统坐标基准的稳定性,提高高分辨成像过程中的姿态控制精度。
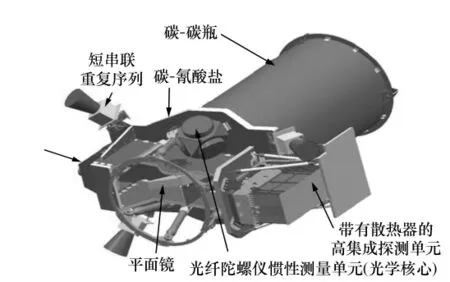
图11 Pleiades星载一体化结构布局Fig.11 Integration structure of Pleiades
采用星载一体化设计可突破载荷与平台的界限,具有如下优点:
(1)整星结构简化,系统集成度高,实现了卫星的轻小型化设计,进而促使研制及发射成本大幅度降低;
(2)基于结构一体化设计,卫星质心低,传力路径好,与传统分部式设计相比,卫星基频大幅提高;
(3)整星转动惯量小,有利于姿态控制系统机动性能的提高;
(4)星上仪器设备围绕载荷展开布局,卫星构型为近似圆柱型,径向直径包络小,更有利于小火箭灵活发射;
(5)星敏感器、陀螺等姿态敏感器件与载荷光学系统共基准安装,减少了姿态测量误差,使姿态控制精度和载荷成像定位精度大大提高。
采用星载一体化除具备上述优点外,还需通过对载荷及卫星结构的装配特点进行详细研究,寻求一体化卫星总体集成的最佳结合,完成一体化卫星总装流程及装配、检测方案设计。总之,采用星载一体化设计是高分辨小卫星未来发展的趋势。
5 结论
纵观国内外遥感卫星的发展状况可以看出,具有高空间分辨率、高时间分辨率、高光谱分辨率、高机动能力、高集成化等诸多特点为一体的高性能小卫星发展趋势已经形成,作为 Astrium Services集团运营的新一代卫星中的一员,Pleiades的在轨运营值得我国航天科研工作者学习和借鉴。
本文有针对性地剖析了Pleiades在多星组网轨道设计、一体化超分辨焦平面设计、一体化综合电子学设计及敏捷姿态控制系统设计等方面所采用的先进技术和设计理念,并在此基础上提出了适应我国国情的新技术发展方向,但由于篇幅限制,需要继续拓展的研究领域不能逐一说明,其中包括图像后处理技术以及在轨图像增强技术等。上述技术的应用可作为我国高性能一体化小卫星研制领域发展的重要参考。
[1] 胡君,王栋,孙天宇.现代航天光学成像遥感器的应用与发展[J].中国光学与应用光学,2010,3(6):510-532.HU J,WANG D,SUN T Y.Application and development of recent space optical imaging remote sensors[J].Chinese J.Opt.Appl.Opt.,2010,3(6):510-532.(in Chinese)
[2] 韩昌元.近代高分辨地球成像商业卫星[J].中国光学与应用光学,2010,3(10):201-208.HAN CH Y.Recent earth imaging commercial satellites with high resolution[J].Chinese J.Opt.Appl.Opt.,2010,3(10):201-208.(in Chinese)
[3] 韩昌元.高分辨力空间相机的光学系统[J].光学 精密工程,2008,16(11):2164-2172.HAN CH Y.Study on optical system of high resolution space camera[J].Opt.Precision Eng.,2008,16(11):2164-2172.(in Chinese)
[4] 冯钟葵,石丹,陈文熙,等.法国遥感卫星的发展—从SPOT到Pleiades[J].遥感信息,2007,4(1):87-91.FENG ZH K,SHI D,CHEN W X,et al..The progress of french remote sensing satellite-from SPOT toward pleiades[J].Remote Sensing Information,2007,4(1):87-91.(in Chinese)
[5] 史光辉.卫星对地观测高分辨率光学系统和设计问题[J].光学 精密工程,1999,7(1):16-24.SHI G H.High resolusion optical systems used to observation from the satellites to the earth and problems in design[J].Opt.Precision Eng.,1999,7(1):16-24.(in Chinese)
[6] 金光,张亮,胡福生.大F数高分辨率空间望远镜光学系统[J].光学 精密工程,2007,15(2):155-159.JIN G,ZHANG L,HU F SH.Investigation on space optical system of high F number and high resolution[J].Opt.Precision Eng.,2007,15(2):155-159.(in Chinese)
[7] 胡福生,金光,鲍赫.基于多帧“差分”图像的分辨率提高算法[J].光电工程,2007,34(6):88-96.HU F SH,JIN G,BAO H.High-resolution image reconstruction based on multi-frame difference images[J].Opto-Electronic Eng.,2007,34(6):88-96.(in Chinese)
[8] CATHERINE L N,LATRY C,MOURY G,et al..On-board optical image compression for future high resolution remote sensing systems[J].SPIE,2000,4115:332-346.
[9] DANTÈSA D,NEVEUA C,GILBERTA T,et al..Design and performances of a new generation of detection electronics for earth observation satellites[J].SPIE,2003,5017:205-216.
[10] CATHERINE G D,LAMARD J L,CHEROUTRE P,et al..The high resolution optical instruments for the PLEIADES HR earth observation satellites[C]//Internation Astronautical Federation-59th International Astronantical Congress 2008.Glasgow,Scotland,Sept.29-Oct.3,2008.
[11] LATRY C,DELVIT J M.Staggered arrays for high resolution earth observing systems[J].SPIE,2009,7452:332-346.
[12] DAMILANO P.Pleiades high resolution satellite:a solution for military and civilian needs in metric-class optical observation[C]//15th Annual/USU Conference on Small Satellites,Paris Frane,Aug.13-16,2001.
[13] 陶淑苹,金光,曲宏松,等.实现空间高分辨成像的数字域时间延迟积分CMOS相机设计及分析[J].光学学报,2012,32(4):155-159.TAO SH P,JIN G,QU H S,et al..Design and analysis of CMOS camera based on time delay and integration in digital domain to realize spatial high-resolution imaging[J].Acta Optica Sinica,2012,4(2):155-159.(in Chinese)
[14] HARDHIENATA S,NURYANTO A,TRIHARJANTO R H,et al..Technical aspects and attitude contorl strategy of lapan-tubsat micro satellite[C]//5th IAA Symposium on Small Satellites for Earth Observation,Berlin,Germany,April 4-8,2005.
[15] PIAO Y J,XU W.Method of auto multi-exposure for HDR imaging[C]//Proc.IEEE Symp.International Conference on Computer,Mechatronics,Control and Electronic Engineering,Changchun,China,Aug.24-26,2010,6:93-97.
[16] 刘源.可重构星载计算机体系结构与容错技术研究[D].哈尔滨:哈尔滨工业大学博士学位论文,2010:10-30.LIU Y.Research of architecture of reconfigurable on-board-computer and fault tolerant[D].Harbin:Harbin Institute Technology,2010:10-30.(in Chinese)
[17] 孙兆伟,刘源,邢雷,等.面向多任务的可重构星载计算机设计[J].系统工程与电子技术,2011,33(6):1407-1414.SUN ZH W,LIU Y,XING L,et al..Design of reconfigurable on-board computer for multitask[J].Systems Eng.Electronics,2011,33(6):1407-1414.(in Chinese)
[18] 孙兆伟,邢雷,徐国栋,等.基于可重构技术的上面级航天器综合电子系统[J].光学 精密工程,2012,20(2):296-304.SUN ZH W,XING L,XU G D,et al..Integrated electronic system of upper-stage spacecraft based on reconfigurable technology[J].Systems Eng.Electronics,2012,20(2):296-304.(in Chinese)
[19] 卢东昕,洪炳熔,高峰.基于软件总线的星载系统软件设计及其仿真[J].计算机工程与设计,2000,21(3):21-28.LU D X,HONG B R,GAO F.The design and formulating for on-board system software based on software bus[J].Computer Eng.Design,2000,21(3):21-28.(in Chinese)
[20] 王家骐,金光,曲宏松,等.星载一体化初步构想与展望[J].光学 精密工程,2007,10(15):1-26.WANG J Q,JIN G,QU H S,et al..Notion and expectation of conspectus of incorporate design of satellite platform and payload[J].Opt.Precision Eng.,2007,10(15):1126.(in Chinese)