任意偏置点的电光调制器自动偏置控制方法
2013-03-10赵尚弘李勇军朱子行
李 轩,赵尚弘,李勇军,朱子行,董 毅,韩 磊,赵 静
(空军工程大学信息与导航学院,西安710077)
任意偏置点的电光调制器自动偏置控制方法
李 轩,赵尚弘*,李勇军,朱子行,董 毅,韩 磊,赵 静
(空军工程大学信息与导航学院,西安710077)
为了实现对双电极马赫-曾德尔电光调制器任意直流偏置点的自动偏置控制,采用在闭环控制基础上,引入一个可调移相器使不同直流偏置点处误差信号相同的方法,理论分析了可调移相器相移量与直流偏置相位的关系,仿真得到对于不同偏置点,当调制器直流偏置相位漂移达-0.15rad~0.08rad,移相器引入附加相位漂移-0.55rad~0.55rad时,经偏置控制后相位漂移被限制在-3.0×10-4rad~1.7×10-4rad范围内。结果表明,该方法有效实现了对电光调制器任意直流偏置点的自动偏置控制。
光通信;直流偏置点自动控制;闭环反馈控制;双电极马赫-曾德尔电光调制器
引 言
利用光纤传输射频信号的光载无线(radio over fiber,ROF)系统日益成为人们研究的热点[1-3]。在ROF系统中,由于温度、电离辐射等外部环境因素的影响,电光调制器的半波电压会发生变化,同时直流偏置电源电压也会有一定程度的随机起伏,引起调制器的直流偏置点发生漂移,导致系统性能恶化。
增加一个闭环反馈系统来进行自动偏置控制是一种有效抑制电光调制器直流偏置点漂移的方法。许多学者已提出多种自动偏置控制方法[4-10]。参考文献[4]中利用低频扰动进行直流漂移补偿,该方法只适用于线性点的偏置控制。参考文献[5]和参考文献[6]中将输入信号与反馈信号进行混频、滤波得到误差信号,利用误差信号对偏置单元进行控制,分别实现了相干频移键控(frequency-shift keying,FSK)系统和光生微波本振系统的直流漂移补偿,只适用于直流偏置点为最小传输点的调制器。参考文献[7]中通过引入小幅度扰动信号进行自动偏置控制,可以实现0,π/2和π相位偏置点的控制,其只适用于电光幅度调制。参考文献[8]中提出利用扰动信号基波及二次谐波分量信号幅度比值来进行调制器自动偏置控制,由于其比值在相位nπ(n为自然数)处发生正负无穷突变,所以该方法不适用于偏置点为0和π的调制器,且滤波器、幅度相除及信号比较部分增加了系统复杂性。参考文献[9]中通过比较调制器前后的光功率来实现偏置点自动控制,由于误差比较器中需要调整两个放大器增益使得调制前后光电流相等,而最小传输点处光功率近似为0,所以其不适用于偏置点为最小传输点的调制器,参考文献[10]中提出并实现了用相干自混频方法监测和抑制马赫-曾德尔调制器偏置点漂移,具有较高的监测灵敏度,但主要适用于偏置点为最小传输点的调制器,而且需要对光偏振进行控制,系统复杂度高。
针对双电极马赫-曾德尔电光调制器(dual-electrode Mach-Zehnder modulator,DE-MZM)在ROF系统中的应用,作者提出了一种改进的基于闭环控制的DE-MZM自动偏置控制方法。该方法通过引入一个可调移相器,可以实现调制器任意直流偏置点的自动偏置控制,适用于双边带(double side band,DSB)、单边带(single side band,SSB)、光载波抑制(optical carrier suppression,OCS)调制以及低偏置等工作方式的电光调制器。比例-微分-积分(proportion-integration-differentiation,PID)控制方法简单,鲁棒性强,被广泛应用于反馈控制系统[11],因此控制单元采用PID控制,以降低系统复杂性。
1 理论分析
作者提出的DE-MZM自动偏置控制方法如图1所示。结合DE-MZM调制模型[12],引入反馈控制电路和移相器2,实现了对调制器任意偏置点的自动偏置控制。
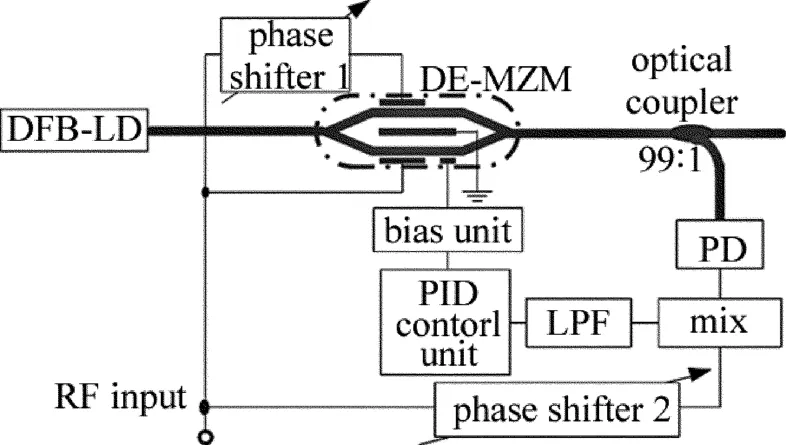
Fig.1 Schematic diagram of automatic bias controlmethod
射频输入信号经过两次分路。第1次分路后,一路信号经过移相器2与反馈信号进行混频;另一路信号对DE-MZM进行电光调制,该路信号经过再次分路,分别加载到调制器的上下两个电极上,其中加载到上电极的信号经过移相器1产生一定相移。分布反馈式激光器(distributed feedback laser diode,DFB-LD)输出光经过调制器被调制,调制器输出光信号经过光耦合器分束后,部分光用来进行反馈控制。反馈控制电路主要包括光探测器(photodiode,PD)、混频器、低通滤波器(low pass filter,LPF)、PID控制单元和偏置单元。
调节偏置单元直流偏置电压和移相器1相移,可以改变调制器的直流偏置点,实现不同电光调制方式,包括双边带、单边带、载波抑制调制及低偏置方式等。调节移相器2相移,可以改变LPF输出误差信号的相位,使误差信号保持在余弦函数的线性点附近,便于控制单元进行控制。
DE-MZM输出信号包络为:

式中,Ein为输入光信号,α为插入损耗,γ=0.5为分束比。设输入到MZM两臂的射频输入信号幅度相等,相位差为β,ω为信号角频率,m=πVRF/Vπ为调制系数,VRF为两路信号幅度,Vπ为半波电压,θ= πVDC/Vπ为直流(direct-current,DC)偏置相移,VDC为直流偏置电压。
探测器输出为:
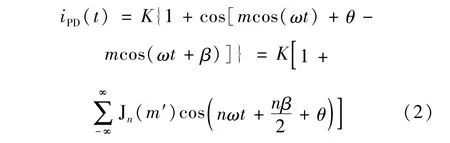
式中,K=αηεPin/2,η为探测器效率,ε为耦合器分光率,Pin为输入光功率。Jn(·)表示n阶第1类贝塞尔函数,m′=2m sin(β/2)。
设经过移相器2输入混频器的射频信号为VRF′cos(ωt+σ),VRF′为该路信号振幅,σ为信号经过移相器2产生的相移,则混频器输出信号经低通滤波器后得到的直流分量U1为:

式中,K′=K J1(m′)VRF′R/2,R为LPF等效输出阻抗。θ=θ0-Δθ,θ0为调制器正常工作情况下直流偏置相位,Δθ为偏置点漂移引起的偏置相位变化,δ=θ0+β/2-σ为相移常数。当电源电压和调制器半波电压共同变化时,引起的偏置相位漂移为:

式中,VD0,Vπ0分别为调制器初始时刻直流偏置电压和半波电压,ΔVDC,ΔVπ分别为工作过程中偏置电压和半波电压的变化。
在没有移相器2时,混频后经低通滤波器得到U′=K′cos(θ0+β/2-Δθ),该信号分量中包含有误差信息。若采用PID控制,需在PID控制器前加入减法器得到误差信号:

当调制器位于不同直流偏置点或移相器1取不同相移时,(5)式中余弦函数相位中θ0+β/2项会发生变化,导致U2不能够始终与Δθ保持线性关系,即任意偏置点处U2唯一对应Δθ。由于PID控制为线性控制,根据输入信号的正负及大小输出相应的控制信号来实时调整受控变量,因此,当其输入误差信号信号U2与Δθ为线性关系时,可以实现自动控制,否则PID控制失效。
表1中给出了不含移相器2时,不同调制方式下误差信号U2表达式。可以看出,通过调整θ0和β可以获得不同偏置点和不同电光调制方式,包括DSB,SSB,OCS调制以及其它偏置点(如5π/6)处的调制。在各种调制方式中,OCS和SSB调制时U2与Δθ为线性关系,而DSB调制时,U2与Δθ是非线性的,即无论Δθ为正值或为负值,PID控制单元输入误差信号恒为负值,此时PID控制失效。可见在没有移相器2时该系统不能够实现对调制器任意偏置点或任意调制方式的自动偏置控制。
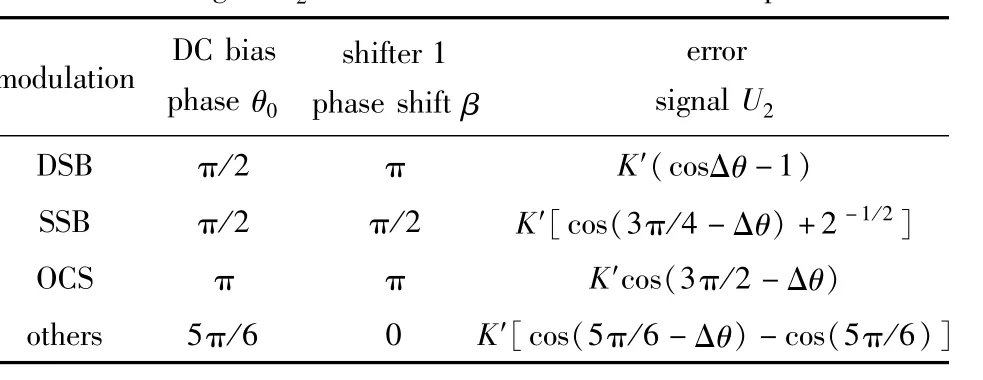
Table 1 Error signal U2 under differentmodulation without phase shifter2
表2为加入移相器2后不同调制方式下移相器2的相移量σ选取和LPF输出信号U1表达式。通过调整σ,使(3)式中相移常数δ=π/2,此时U1即为偏置点漂移产生的误差信号。其中直流偏置相位θ0、移相器1相移量β与移相器2相移量σ的关系为:

对比表1和表2可以看出,对于DE-MZM调制系统,无移相器2时,误差信号表达形式随着直流偏置点的变化而改变,在某偏置点误差信号会变为非线性信号,使PID控制失效,无法实现对任意偏置点的控制。通过在闭环PID部分加入可调移相器2并对其进行调整,可使不同偏置点处的系统误差函数形式相同,由于反馈控制系统的误差函数形式固定,且U1表达式中Δθ在余弦函数的线性点附近,因此,可以实现任意直流偏置点处自动偏置控制。
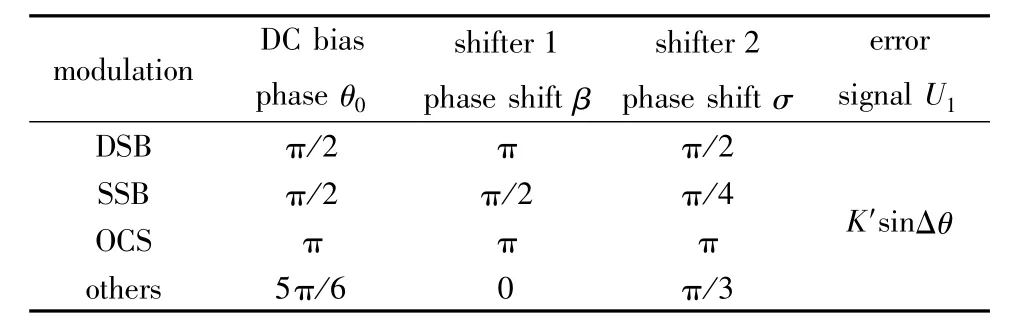
Table 2 Error signal U2under differentmodulation with phase shifter 2
考虑可调移相器的精度,在误差信号中引入由移相器产生的附加相位漂移Δδ′,此时误差信号为U1′= K′sin(Δθ+Δδ′)。在Δθ+Δδ′值不为(n+1/2)π情况下,都可以实现有效的PID控制,系统具有大的容差。
2 系统仿真及结果
对自动偏置控制系统的电路部分进行仿真,仿真结构如图2所示。
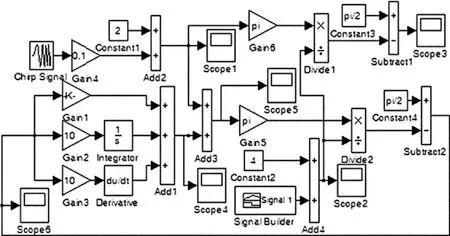
Fig.2 Structure of simulation system
偏置单元电源电压的随机起伏及电光调制器半波电压的变化都会引起直流偏置点的漂移。用常数叠加啁啾信号来模拟DC偏置单元电源电压的随机起伏,其波形由示波器1测得。常数叠加信号发生器产生的单调递减信号来模拟调制器半波电压的变化,其波形由示波器2测得。两部分常数分别选取2和4,表示直流偏置相位为π/2。无偏置控制时系统的直流偏置相位漂移由示波器3测得。PID控制器的参量选取为Kp=600,Ki=10,Kd=10,其输出控制信号由示波器4测得。经反馈控制后偏置单元输出电压由示波器5测得。经反馈控制后调制器的直流偏置相位变化由示波器6测得。仿真过程中,设误差函数K′sinΔθ中K′=1,由于经反馈控制后相位漂移Δθ很小,可认为sinΔθ≈Δθ。运行后,示波器1~示波器6的波形如图3所示。
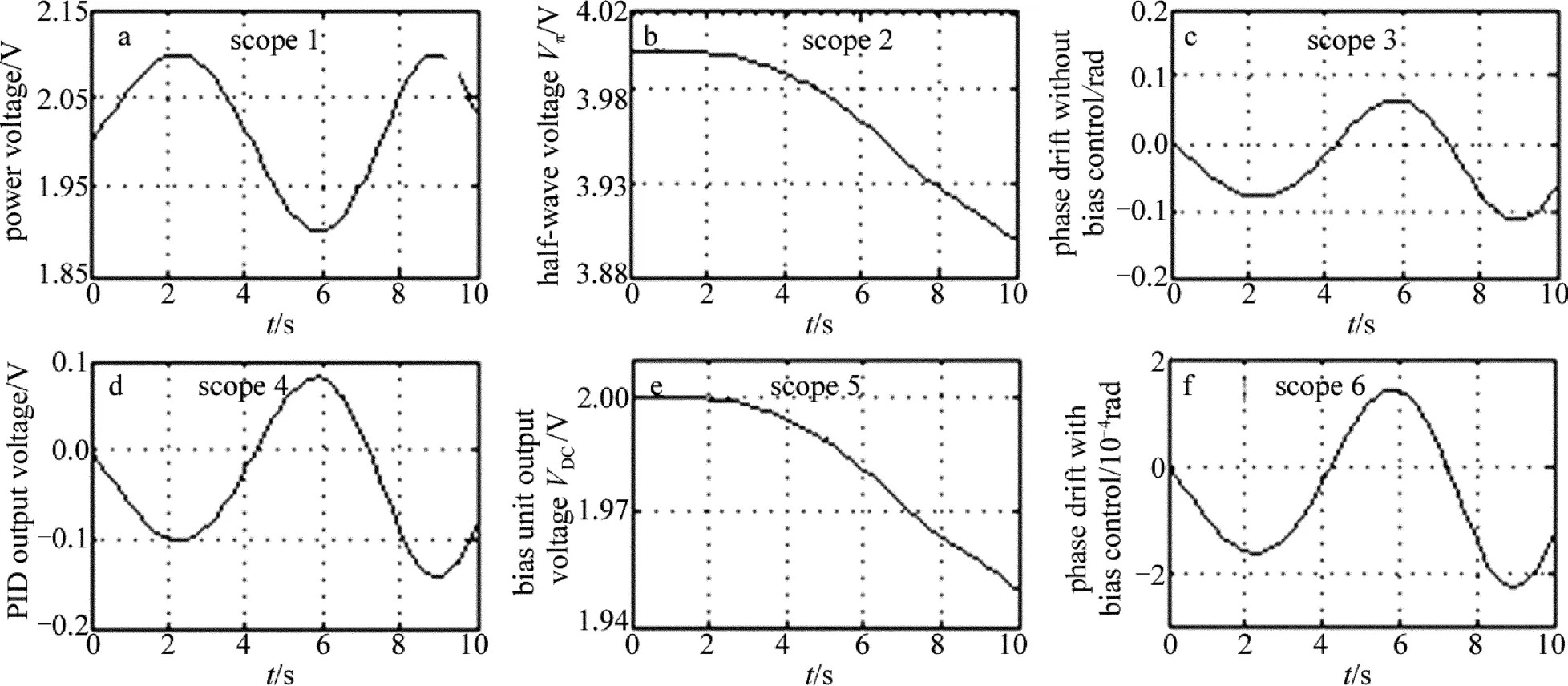
Fig.3 Waveformsa—power voltage fluctuation b—half-wave voltage change c—phase driftwithout bias control d—PID output voltage e—bias unit outputwith bias control f—phase driftwith bias control
图3a中DC单元电源电压在2V附近随机起伏,图3b中半波电压由4V逐渐减小。无偏置控制时,由于电源电压随机起伏和半波电压共同影响,直流偏置相位漂移范围为-0.115rad~0.065rad,如图3c所示。进行偏置控制时,PID控制器输出控制电压波形见图3d,它由输入误差信号即图3f中所示相位漂移决定。图3e中直流偏置单元输出电压由其电源电压和PID输出控制电压叠加得到,电源电压随机起伏对偏置单元输出电压几乎没有影响,输出电压随着调制器半波电压的变化而相应变化,由2V逐渐减小,使直流偏置相位保持为π/2。图3f中PID控制器输入误差信号,即经偏置控制后相位漂移很小,保持在-2.305×10-4rad~1.410×10-4rad范围内,直流偏置相位漂移得到有效抑制。
将图2中Constant 1值改为4,Constant 3和Constant4值改为π,其余值不变,可测得直流偏置相位为π时的偏置控制情况。同理,将以上参量分别设为10/3和5π/6,可得到直流偏置相位为5π/6时偏置控制情况。图4为不同偏置点处电源电压随机起伏和半波电压变化引起的相位漂移以及经偏置控制后的相位漂移,可以看出,偏置控制后相位变化情况由无偏置控制时相位变化决定,但其范围减小至10-4rad量级。因为不同偏置点处电源电压和半波电压引起的相位变化不同,如图4a所示。所以经偏置控制后各直流偏置点处相位漂移波形有一定区别,见图4b。对于所有偏置点,电压变化引起的相位变化范围为-0.15rad~0.08rad,经过反馈控制系统后,相位漂移被抑制在-3.0×10-4rad~1.7× 10-4rad范围内。
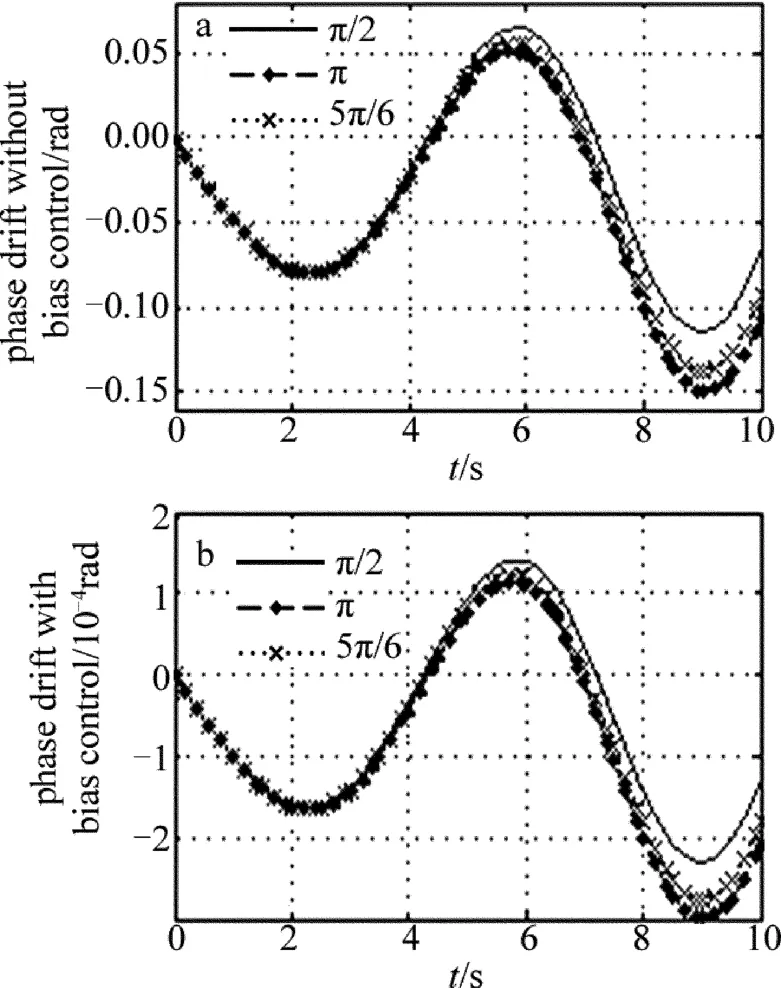
Fig.4 Phase driftwhile bias phase areπ/2,πand 5π/6a—without bias control b—with bias control
考虑移相器精度,若移相器1和移相器2精度都为±5°,则移相器引入±10°的随机附加相位漂移,该附加相位漂移的随机分布服从高斯分布。图5为引入Δδ′前后直流偏置相位为π/2时偏置控制情况。加入附加相位漂移后的偏置控制后相位漂移Δθ出现了一定抖动,变化规律与无附加相位漂移时基本相同,被抑制在-3.0×10-4rad~1.7×10-4rad范围内。系统的抗干扰能力较强。
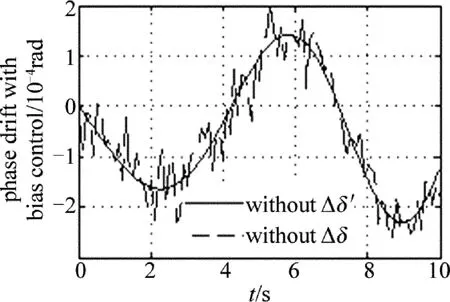
Fig.5 Phase drift after bias controlwithout and with added phase drift
3 结 论
为提高ROF通信系统性能,需要对电光调制器的直流偏置点漂移现象进行有效抑制。已提出的多种自动偏置控制方法主要针对直流偏置点为线性点或最小传输点的调制器,不能够实现对电光调制器任意偏置点的直流偏置控制,应用受限。对此,作者提出了一种改进的基于闭环PID控制的DE-MZM自动偏置控制方法:通过引入一个可调移相器,可以实现对DE-MZM任意直流偏置点的自动偏置控制,当调制器的静态直流偏置点改变时,只需要调整可调移相器的相移量,即可实现对新直流偏置点的偏置控制。该方法可适用于DSB,SSB,OCS调制以及低偏置等工作方式的系统,且反馈控制系统结构简单、抗干扰能力强、器件易于实现,在ROF系统中可以获得广泛应用。
1]YAO JP.Microwave photonics[J].Journal of Lightwave Technology,2009,27(3):314-335.
2]LIU Q,DINGM Y,LUO L H,et al.A full-duplex radio-over-fiber system for60GHzmillimeterwave[J].Laser Technology,2011,35(2):264-267(in Chinese).
[3]LIU F H,AN Y Y,WANG P,et al.3GHz analog optical fiber transmission system applied in ultra-fast diagnosis[J].Laser Technology,2011,35(5):596-599(in Chinese).
[4]AISAWA S,MIYAO H,TAKACHIO N,et al.DC drift compensationmethod using low frequency perturbation for LiNbO3intensity modulator[C]//Lasers and Electro-Optics Society,American Physical Society.Pacific Rim Conference on Lasers and Electro-Optics.Chiba,Japan:IEEE Conference Publications,1997:123-124.
[5]JIANGQ,KAVEHRADM.A subcarrier-multiplexed coherent FSK system using a Mach-Zehndermodulator with automatic bias control[J].Photonics Technology Letters,1993,5(8):941-943.
[6]ONILLON B,BENAZET B,LLOPISO.Advanced microwave optical for LO distribution in satellite payloads[C]//International Topical Meeting on Microwave Photonics.Grenoble,France:IEEE Conference Publications,2006:1-4.
[7]ZHAO Zh R.Electro-opticmodulator of the automatic gain and automatic bias control system[D].Beijing:Beijing University of Posts and Telecommunications,2010:1-56(in Chinese).
[8]YANG Zh G.Research on stability of integrated opticsmodulator bias point[D].Chengdu:University of Electronic Science and Technology of China,2011:1-53(in Chinese).
[9]TANG Y F,LIH Z,LIR.Research on auto-control of bias voltage of high speed EOM[J].Journal of Air Force Engineering University(Natural Science Edition),2011,12(4):69-72(in Chinese).
[10]WEN H,GE Y H,JIANG H,et al.Monitoring bias offset drift of Mach-Zehndermodulator based on coherent hybrid scheme[J].Chinese Journal of Lasers,2009,36(8):2035-2041(in Chinese).
[11]HEONG K A,CHONG G,LIY.PID control system analysis,design,and technology[J].Transactions on Control Systems Technology,2005,13(4):559-576.
[12]YIN J.Study of ultra-wideband radio-over-fiber system’s design and application[D].Beijing:Beijing University of Posts and Telecommunications,2010:24-27(in Chinese).
An automatic bias controlmethod applied to all bias points of electro-optic modulator
LIXuan,ZHAO Shang-hong,LIYong-jun,ZHU Zi-hang,DONG Yi,HAN Lei,ZHAO Jing
(School of Information and Navigation,Air Force Engineering University,Xi’an 710077,China)
To control the bias of dual-electrode Mach-Zehnder electro-optic modulators automatically,an adjustable phase shifter was introduced based on closed-loop controlmethod so that the error signal remained the same at different direct-current(DC)bias points.The relationship between phase shift of the adjustable shifter and DC bias phasewas derived by theoretical analysis.Simulation showed that,the driftof DC bias phase in the range of-0.15rad~0.08rad with the added phase drift caused by the phase shifter in the range of-0.55rad~0.55rad could be suppressed to-3.0×10-4rad~1.7× 10-4rad at differentDC bias points.The results show that the automatic bias control ofan electro-opticmodulator atany DC bias points is effectively achieved.
optical communication;direct-current bias point automatic control;closed-loop feedback control;dualelectrode Mach-Zehnder electro-opticmodulator
TN929.11
A
10.7510/jgjs.issn.1001-3806.2013.04.013
1001-3806(2013)04-0473-05
国家自然科学基金资助项目(61108068)
李 轩(1989-),男,硕士研究生,主要从事微波光子方面的研究。
*通讯联系人。E-mail:zhaoshangh@yahoo.com.cn
2012-09-05;
2012-10-17
