基于激光影像的物体三维点云获取系统
2013-03-06王震刘进
王震,刘进
(1.武汉大学测绘学院,湖北武汉 430079; 2.武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079)
基于激光影像的物体三维点云获取系统
王震1∗,刘进2
(1.武汉大学测绘学院,湖北武汉 430079; 2.武汉大学测绘遥感信息工程国家重点实验室,湖北武汉 430079)
三维点云获取系统能够快速地获取目标物体的几何信息,生成大量点云,将目标的真实三维形态在计算机中可视化的展现出来。本文提出了一种新的三维点云数据获取的方法,应用在自主开发的基于激光影像的物体三维点云获取系统中,即标定激光面映射目标表面点的一维坐标,利用单像摄影测量后方交会和一维坐标的联合解算,得出目标点三维伪坐标。通过坐标逆向旋转恢复,得到真实的三维坐标数据,据此完整地建立目标物体的三维可视化模型。
相机标定;激光线检测;三维建模
1 引 言
基于激光影像的物体三维点云获取系统通过激光影像处理和摄影测量技术获取三维实物表面点坐标数据,并由三维坐标数据生成三维点云。目前三维点云获取技术在许多领域的应用十分广泛,例如虚拟现实模拟、游戏、电影、电子商务等。
本文提出的基于激光影像的物体三维点云获取系统使用了一种新的模型数据采集方法,即物体单幅影像结合激光扫描的方法。利用标定装置确定相机空间方位、姿态以及激光面和旋转中心的空间位置,通过相机得到的单幅影像和已标定过的激光扫描的数据,计算经旋转恢复的物体表面点的三维空间坐标,根据点云数据可视化显示目标物体的形态。
2 系统平台搭建
本系统由软件和配套的硬件系统组合而成。整套设备造价低廉,测量完整,可多视角观察可视化三维点云模型。其中硬件系统分为四部分,如图1所示:
(1)检校板:由国际象棋棋盘制成,以棋盘的竖直边为x轴,以棋盘的横边为y轴,z轴垂直于棋盘朝向相机;
(2)激光器:本系统采用5 mw 650 nm一字激光器,射出高亮的红色激光线。可由光圈调整激光线位置、亮度和线宽;
(3)旋转平台:旋转平台主要由微型三脚架、步进电机和圆盘连接组成。由MCS-51单片机控制步进电机以一定步幅旋转,带动圆盘上物体旋转360°;
(4)相机:本系统采用奥尼ANC高清摄像头,与激光发生器保持固定观察角度,视野中必须包含标定板和旋转平台。
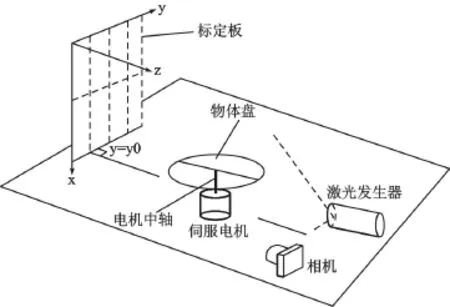
图1 硬件设备安装图纸
软件主要包括三个版块:相机标定,物方图像获取,物体表面点三维坐标测量及三维模型重建。具体程序如图2所示:

图2 系统软件流程图
3 物体三维点云获取算法流程
物体三维点云获取的过程主要包括系统标定、物方图像获取、激光线提取及三维点云的生成、三维模型重建,如图3所示。

图3 系统算法流程图
系统标定:标定包括相机标定、激光线标定和旋转平台的标定。根据张正友经典的棋盘标定方法可迅速得出相机内参数。相机标定的过程中,调整激光线与拍摄最后一幅图片的棋盘标定板上的第二条竖直线相重合,确定激光面的一维坐标,即与其重合的标定板上的竖直线的坐标,如图4所示。调整激光线穿过旋转平台中心,获取其图像,利用图像处理的方法检测激光线及其中点的像素坐标,摄影测量前方交会计算旋转中心的三维空间坐标。旋转平台标定的目的是能够恢复因旋转而错位的物方点空间坐标。

图4 激光面与棋盘标定板的重合标定
获取物方图像:通过上位机串口通讯控制单片机,以四相励磁的方式向步进电机发送脉冲,驱动电机以1.406 25°的步幅旋转,目标物体表面360°地经过激光线的扫描,相机实时拍摄,得到256幅目标图像。
激光线提取及三维点云坐标的生成:复杂背景下激光线提取的干扰严重,因此利用多个标准来提取激光点,主要包括色彩标准(H、S、V)和激光线的连续性(纵向连续性和横向连续性)。将目标图像转成HSV颜色通道的图像,以色调、饱和度和亮度为标准进行阈值分割。激光线的连续性提取标准设定为:提取点的纵向y坐标从上到下连续递减,横向x坐标几乎不变,左右差值不超过5个像素,抑或连续递增或递减。提取效果如图5所示。最终通过立体视觉测量方法计算三维点云坐标,并使每幅图像的点云经过以电机转轴为中心轴的逆旋转恢复真实坐标。
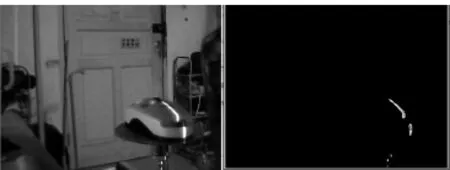
图5 激光线提取效果图
三维重建:读取获得的点云位置,利用OpenGL中中心投影函数,重建目标物体的三维模型。鼠标交互操作,进行任意角度的模型变化,更真实地将三维模型展现给用户。
4 基于激光影像的立体视觉测量原理
本系统采用立体视觉测量方法,以已标定的激光面为辅助,测量目标物体表面点的三维空间坐标。
4.1 近景摄影测量原理

图6 相机针孔模型
如图6所示,三维空间点Q(X,Y,Z),以点O为投影中心,在图像平面上的成像点为q(x,y,f)。根据相似三角形原理可得:

其中焦距(fx,fy),像主点偏移量(cx,cy),以及径向畸变、切向畸变参数构成了相机标定的内方位元素。
对于图像和物体之间的投影关系,我们可以用相
机坐标系统的旋转和平移来表示。旋转矩阵:
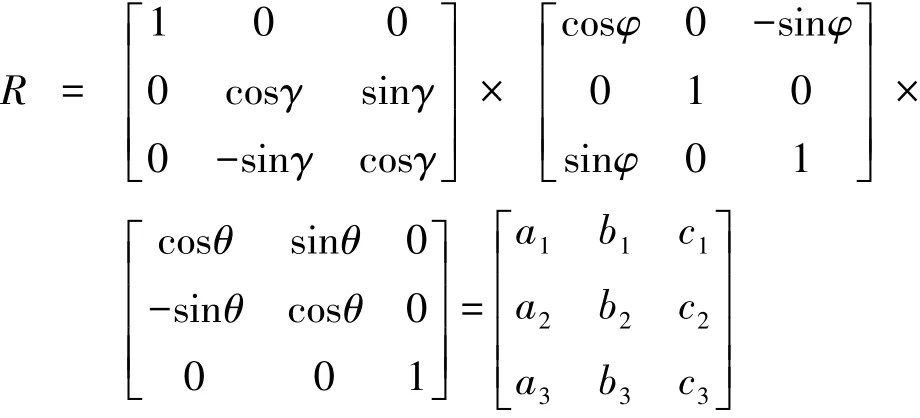
平移矩阵:

物像点计算关系式:
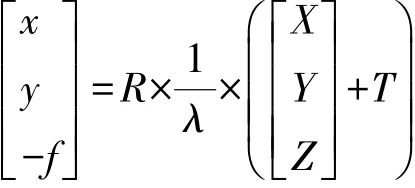
简化得到中心投影共线方程的逆算式:
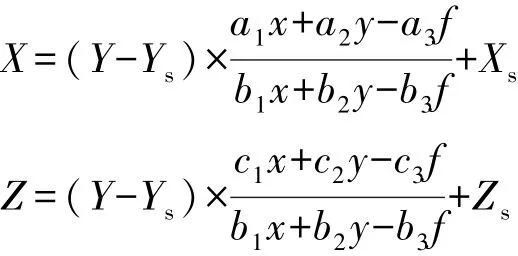
其中,角元素(γ,φ,θ)和线元素(Xs,Ys,Zs)构成了相机标定的外方位元素。
利用图像处理的方法,提取激光采样点,得到目标物体表面点的像方坐标(x,y),通过系统标定得到相机的内外方位元素和激光面的一维坐标(即穿过激光面的物体表面点的Y坐标)。最终根据方程计算出X和Z二维坐标,从而确定目标点的物方三维坐标。
4.2 物方坐标的旋转恢复
物体经过360°旋转被激光线完整扫描,得到的物方坐标是经过不同角度旋转以后的坐标,所以要经过逆旋转计算,恢复物体表面点的真实坐标。
物体在同一水平面内绕旋转中心O(XO,YO,ZO)旋转,中心坐标在标定时已得出,坐标旋转恢复的方程为:
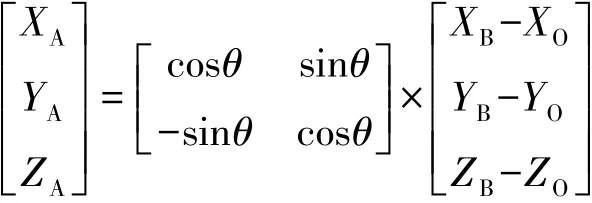
其中(XAYAZA)则是旋转恢复后的物体的真实三维空间坐标。
5 实验结果
以类似于鼠标形状的物体为实验对象,获取完整的物体表面三维点云,在Windows平台下,利用Open-GL 3D API显示。
如图7所示,三维点云在对话框中被完整地显示出来,用户可以根据自己的需要,通过鼠标交互操作,全方位360°的观察目标物体的三维形态。
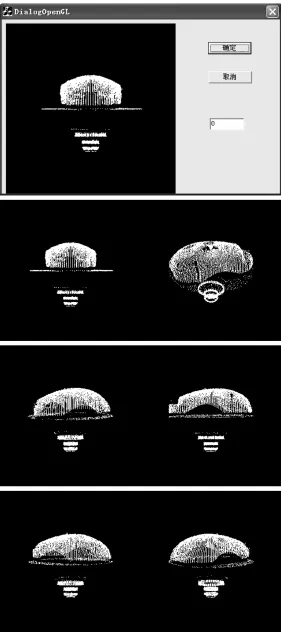
图7 三维点云获取效果图
6 结 论
基于激光影像的物体三维点云获取系统利用图像处理的方法提取激光影响的采样点,通过近景摄影测量技术获取点的三维空间坐标,并进行逆旋转恢复三维真实坐标,生成点云并进行可视化,从而显示目标物体的形态。整套设备造价低廉,运行速度快,可实时控制,获取360°完整点云。点云数据可用于物体长度、面积、体积等参数的计算,后续开发前景广泛。但仍存在一些不足,例如被测目标的尺寸被限制,采样率有待提高等。
参考文献
[1] 杨伟,刘春,刘大杰.激光扫描数据三维坐标转换的精度分析[J].工程勘察,2004,3:61~63.
[2] 张永军,张祖勋,张剑清.利用二维DLT及光束法平差进行数字摄像机标定[J].武汉大学学报·信息科学版,2002,27(6).
[3] 马颂德,张正友.计算机视觉——计算理论和算法基础[M].北京:科学出版社,1999.
[4] 余成波.数字图像处理及MATLAB实现[M].重庆:重庆大学出版社,2003.
[5] 邾继贵,叶声华.基于近景数字摄影的坐标精密测量关键技术研究[J].计量学报,2005,26(3):207~211.
[6] 林君建,苍桂华.摄影测量学[M].北京:国防工业出版社,2005.
[7] 李清泉,杨必胜,史文中等.三维空间数据的实时获取、建模与可视化[M].武汉:武汉大学出版社,2003,236~237.
数字沈阳地理空间框架建设项目通过国家级验收
(本刊讯)2013年12月5日,数字沈阳地理空间框架建设项目国家级验收会议在沈阳召开。
验收会上,专家组听取了工程承建单位沈阳市规划和国土资源局的工作报告和技术报告,观看了项目成果演示,审阅了项目文档资料,经质询与讨论,一致认为数字沈阳地理空间框架建设工程圆满完成设计书规定的各项任务,达到预期目标,同意通过验收。
会议认为,数字沈阳地理空间框架建设项目,建立了覆盖全市的电子地图、影像地图和地名地址数据,建成了多源、多维、多尺度、多时态的框架数据体系,符合国家规范,满足项目设计要求。项目开发了政务版、公众版地理信息公共服务平台,实现了地理信息资源的在线管理、更新、发布及定制开发服务,可满足多领域、多行业、多部门的应用需求。“天地图·沈阳”实现了与国家及省级天地图节点的互联互通及服务聚合,开发了基于Android、IOS等系统的客户端服务,满足了社会公众需求。项目完成的十二运地图网站、规划国土一张图、数字沈河、数字地税、数字城管、数字旅游等示范应用项目,运行稳定。项目出台了《沈阳市地理空间框架建设和使用管理办法》,明确了运行维护机构,建立起保障平台稳定、持续、长期服务的长效机制。
验收会后,召开了数字沈阳地理空间框架建设成果发布推广会。会议强调,沈阳市要进一步加强测绘地理信息基础性工作,认真做好数字沈阳地理空间框架建设成果的更新、维护、运行及部门应用系统的技术支持工作,保持数据的现势性及平台系统的生命力,并做好数字沈阳地理空间框架建设成果的推广应用工作,加大推广的广度和深度,为政府和社会公众做好地理信息服务,全面提升测绘地理信息服务保障能力。
国家测绘地理信息局、辽宁省测绘地理信息局、沈阳市人民政府、沈阳市有关委办局、项目实施单位负责人参加会议。
(沈阳市勘察测绘研究院供稿)
The acquisition System of 3D Point Cloud Based on Image W ith Laser
Wang Zhen1,Liu Jin2
(1.WuHan University,School of Geodesy and Geomatics,Wuhan 430079,China;2.Stat Key Laboratory of Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan 430079,China)
The acquisition system of 3D point cloud can get the geometric information fast and provide a lot of point cloud data in order to show the object3D shape on a computer.This paper gives a new method of getting 3D point cloud data that is applied to the self-made system of object3D point cloud acquisition based on image with laser.The calibrated laser area reflects the one dimension coordinates of object surface.Through the combined calculation of one dimension coordinate and resection of single photogrammetry the original 3D coordinates of object points can be obtained.Through reverse rotation we can get the true 3D coordinates and construct the complete 3D visualmodel of object.
calibration;detection of laser line;3D modeling
1672-8262(2013)06-89-04
P234.4
B
2013—04—27
王震(1991—),男,本科生,主要从事工业测量和近景摄影测量的研究。
国家自然科学基金资助项目(41271454)