日本机器人最新专利摘要选译
2013-03-04
日本机器人最新专利摘要选译
一、【发明名称】水平多关节机器人
【专利编号】JP 2013-111665A
【公开日期】2013.6.10
【申请人】爱普森株式会社
本发明为有关水平多关节机器人的制作技术,提供一种能够更加有效地抑制机械臂振动的水平多关节机器人。
【解决手段】水平多关节机器人具有和基座连接的第1机械臂、通过第1机械臂和基座连接的第2机械臂、安装在基座内使第1机械臂沿水平方向旋转的第1电动机、安装在第2机械臂内使第2机械臂沿水平方向旋转的第2电动机、设置在第2机械臂上的角速度传感器等组件,设第2机械臂旋转轴轴心A到第2机械臂前端的长度为L1,旋转轴轴心A到放置角速度传感器的位置B之间的距离为L2,第2机械臂的重心J到放置角速度传感器的位置B之间的距离为L3,当位置B满足L2>0.5L1且L3<0.2L1的条件,根据基于角速度传感器获取的角速度,或者同时驱动第1电动机和第2电动机,或者驱动第1电动机或第2电动机,得到有效抑制第2机械臂振动的效果。

图1 水平多关节机器人侧视图
选择附图
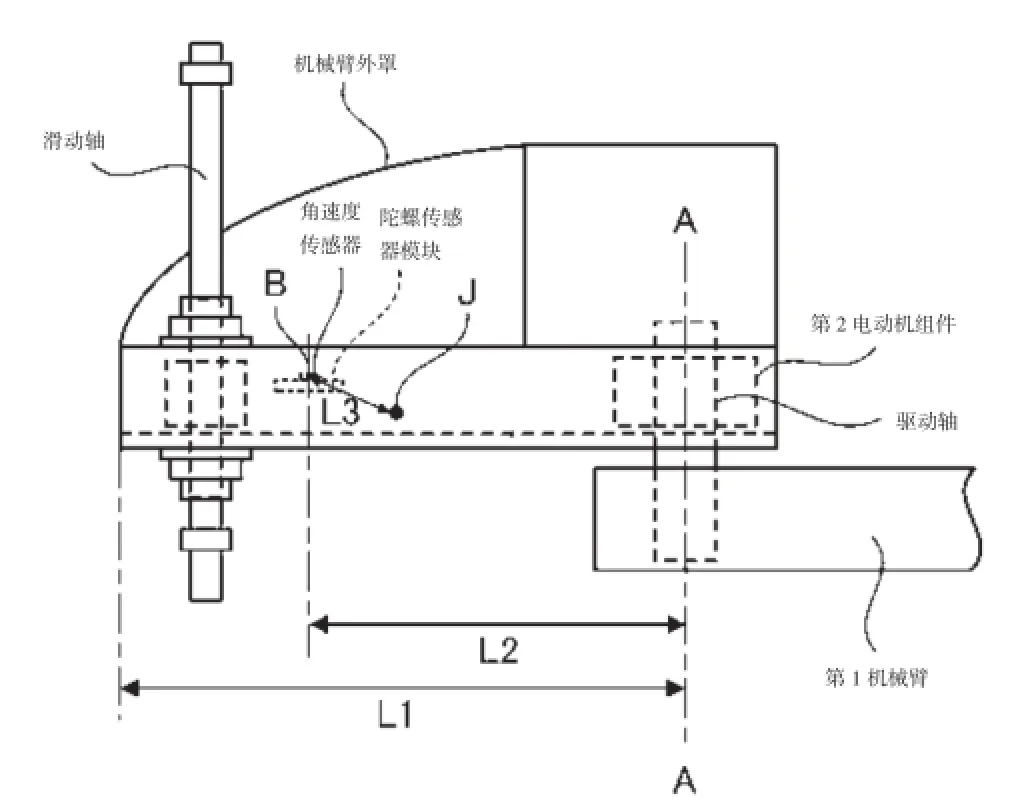
图2 第2机械臂侧面图
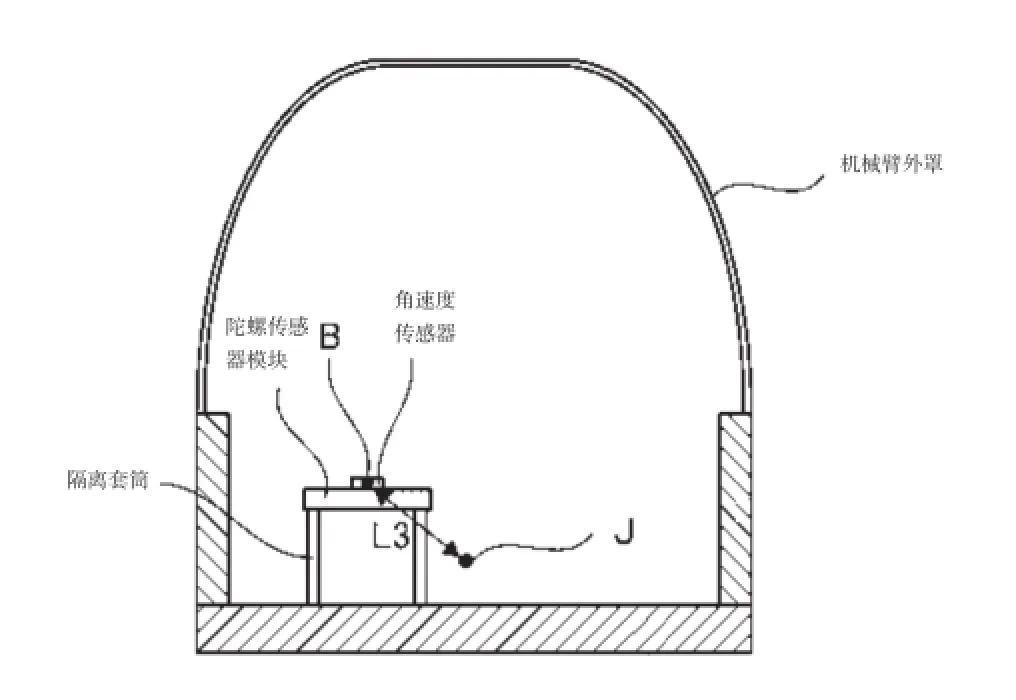
图3 在第2机械臂上设置角速度传感器位置正角方向断面图
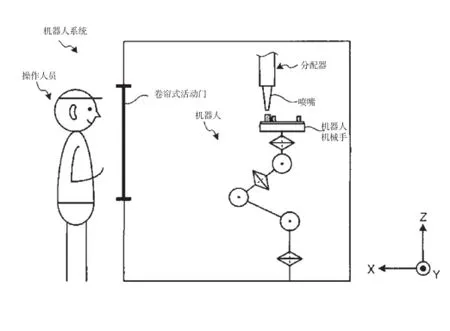
二、【发明名称】机器人系统加工产品的制造方法
【专利编号】JP 2013-111736 A
【公开日期】2013.6.10
【申请人】安川电机株式会社
【摘要】本发明为利用机器人系统加工产品的制造方法,旨在减小作业空间。
【解决手段】机器人系统由机器人和部件供应部组成。部件供应部固定在指定的位置上,供应被加工的部件。机器人处于所指定的传递位置上,从操作人员手中接过被加工部件,移动到供应部附近,将被加工部件递给供应部,然后从供应部处接过加工好的部件,移动到所指定的位置,将部件交给操作人员。
【选择附图】
三、【发明名称】对话装置、对话方法及其对话程序
【专利编号】JP 2013-113966A
【公开日期】2013.6.10
【申请人】丰田汽车株式会社
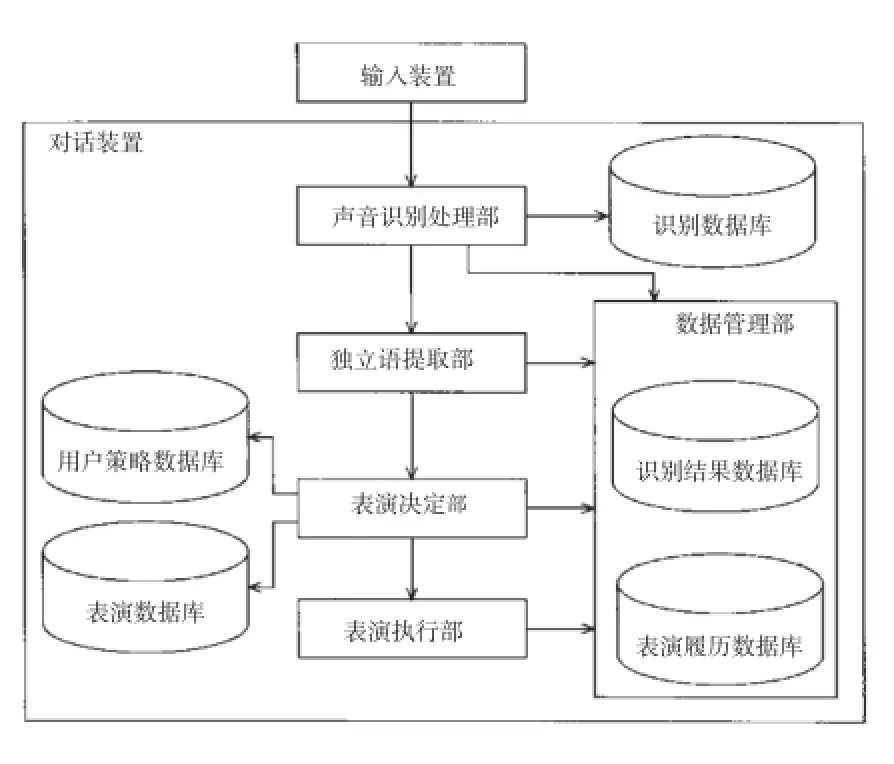
【摘要】本发明旨在实现与用户更加自然流畅对话的对话装置、对话方法和对话程序。
【解决手段】对话装置具有识别用户声音的声音识别手段,通过基于该手段识别的声音信息,与用户进行对话。同时,对话装置还具有数据库,存储通过声音识别手段识别的声音信息,具有提取独立语的独立语提取手段、存贮多项对应独立语表演内容的记忆手段、基于存储的多项表演内容通过独立语提取手段提取的独立语决定执行表演内容的表演内容决定手段、在与用户的对话中执行通过表演决定手段决定的表演内容的表演执行手段等。
【选择附图】