等离子体催化剂活化装置温度控制系统的设计
2013-02-21樊英,何翔,左雄
樊 英,何 翔,左 雄
(中南民族大学 电子信息工程学院,湖北 武汉430074)
在等离子体催化剂活化装置的工作过程中,考虑到温度对催化剂性能的影响,需保持炉内温度在0℃~300℃可控,以满足不同催化剂的处理需求。此装置通过外部电压加热使炉内达到一定工作温度,当内部空心阴极放电时会产生局部高温,使得炉内温度发生变化。由于温度对象的时间常数大、滞后现象严重,当温度变化在最佳值(±10℃~±20℃)时,催化剂的活性和稳定性开始有明显变化。故保持炉内温度稳定,在工业控制中非常重要。传统的人工调节温控方法仅适用于对温度影响要求不高的场合;采用单片机温控方法,可用于一般温度控制场合,但对要求实时性强、数据运算量大的控制系统难以实现实时控制。随着微处理器的发展,数字信号处理器(DSP)以其强大的运算能力逐步成为控制领域的主流选择。TMS320F2812型 DSP[1-2]是 TI公司一款用于控制的高性能、多功能、高性价比的32位定点DSP,其处理能力强,功能模块多,可满足对信号的快速、精确和实时处理需要。
针对等离子体催化剂活化装置的温度控制要求,本文以TMS320F2812 DSP为控制器,设计了基于PID调节的温度控制系统,并运用Matlab对数据结果进行了分析。
1 系统组成及工作原理
该温度控制系统主要由PWM驱动电路、温度采集电路、A/D转换电路、DSP处理模块、数码管显示电路等部分组成,系统框图如图1所示。其中DSP采用TI公司生产的TMS320F2812芯片,该芯片内置ADC,A/D采样频率设定为10 kHz,以达到快速采样的目的。
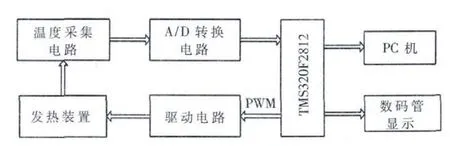
图1 温控系统框图
系统以TMS320F2812为核心,温度采集选用热电偶通过信号调理电路产生0~3.3 V电压信号,通过A/D转换电路将其转换为数字信号,转换后的数字信号由TMS320F2812按照PID算法进行运算,并根据运算结果在 PWM1引脚输出相应的PWM脉宽信号,通过快速调节占空比的宽度来加热炉内电阻丝,当温度达到设定值时,将输出占空比固定的PWM脉冲信号,最终达到温度控制的目的。另外,检测到的温度信号通过数码管显示,上位机通过串口获得实时数据,并运用Matlab对其进行分析。
2 系统硬件电路设计
2.1 PWM驱动电路设计
由于TMS320F2812产生的PWM波形高电平只有3.3 V,其不足以使温度采集电路(如图2所示)中开关管Q11(IRF730)导通,故采用图腾柱结构使其驱动电流放大,同时驱动电压得到提高。PWM驱动电路如图2所示。
在图 2中,当 TMS320F2812 DSP的 PWM1引脚输出为高电平时Q7导通,Q10基极电压比射极电压低,故Q10导通;Q8的 2脚为高电平,故 Q8、Q9导通,且 a点电压达到了开关管Q11的门限电压,使得Q11导通,给电阻丝加热。当TMS320F2812 DSP的PWM1引脚输出为低电平时 Q7关断,促使 Q8、Q9、Q10、Q11都关断,电路不工作,电阻丝停止加热。
2.2 温度采集电路设计
温度采集电路[3]是温度控制系统的前向通道,所以采集温度数据的精确性决定了温度系统的精度。本系统中的温度采集使用热电偶,热电偶传来的带有温度信号的毫伏级电压经滤波、放大后送至A/D转换器。通过采样和A/D转换,将所检测到的炉温对应的电压信号转换成数字量送入计算机,并与给定的电压信号进行比较,计算其偏差。偏差值由TMS320F2812 DSP经PID算法进行处理,产生占空比可变的PWM,通过快速调节占空比来给炉内电阻丝加热,维持炉内温度恒定,以达到控制温度的目的。其电路图如图3所示。

图3 温度采集电路
温度传感器选用铂铑30-铂铑6热电偶,测温范围为0~1 800℃,精度小于±0.5%t。热电偶输出的热电势为十几毫伏,信号先经第一级高精度运放放大,再经后级运放反向输出。第一级运放输入端的钳位二极管起保护作用,避免了输入线路故障的瞬态尖峰干扰损坏。放大后的信号通过A/D转换器输入计算机。热电偶冷端补偿采用温度传感器LM35,其输出电压与摄氏温度一一对应,精度高,且其输出电压在A/D允许输入电压范围内。这种测量方法的冷端温度准确,克服了常规方法补偿误差大和不方便的缺点。
3 系统软件设计
3.1 系统主程序设计
在基于DSP的温度控制系统程序设计中,系统软件采用模块化设计,包括:程序的初始化模块、PID算法子程序、PWM波形产生子程序、ADC采样及滤波子程序、数码管显示子程序以及串行通信子程序等。其主程序流程图如图4所示。

图4 温度控制系统主程序流程图
系统各模块初始化后,判断是否到达采样时间,若采样时间到,则对外部温度信号进行采样;由ADC采样子程序对采样信号进行采样和滤波处理,转换成数字信号;调显示子程序,由数码管对其进行实时显示;上位机与串口通信,保存采样数据,以便用Matlab观察数据变化走向;同时调用PID算法子程序对经滤波后的采样信号进行运算,调PWM波形产生子程序,DSP2812根据前一级运算结果产生占空比可变的PWM波,通过快速调节占空比的宽度来控制发热电阻丝加热的时间长短,以达到控制温度的目的。
3.2 PID算法程序设计
在温度控制系统中,温度存在较大的延迟和惯性,为了实现最优控制,通常采用 PID控制[4-5],它是温度控制系统的核心。在模拟控制系统中,最常用的控制规律是数字PID控制。数字PID控制方法分为增量式PID和位置式PID。
本控制中采用增量式PID控制算法。增量式PID控制算法与位置式PID控制相比仅是算法上有所改变,但是它只输出增量,减少了DSP误操作时对控制系统的影响,而且不会产生积分失控。其控制算法表达式如下:

其中,kP为比例系数;kI为积分系数;kD为微分系数。
PID算法程序流程图如图5所示。

图5 PID算法程序流程图
图5中r(k)为设定温度值,y(k)为采集到的外部温度。将设定值与采样值之间的偏差e(k)作为DSP2812的输入控制量,计算出输出控制量△u(k)作为 PWM的脉宽变化量,通过快速调节占空比的宽度来决定发热电阻加热的时间长短,以达到控制温度的目的。
4 实验结果
通过PID算法的程序设计以及在TMS320F2812中运行调试后,将检测到的温度信号通过串口通信传送给PC机,并由Matlab对数据结果进行分析。
本实验中对无数据滤波处理和有数据滤波处理在相同PID参数下分别进行了测试,结果如图6所示。可以观察到,数据滤波后的尖端脉冲更少,曲线更加平滑,使得测量精度得到提高。
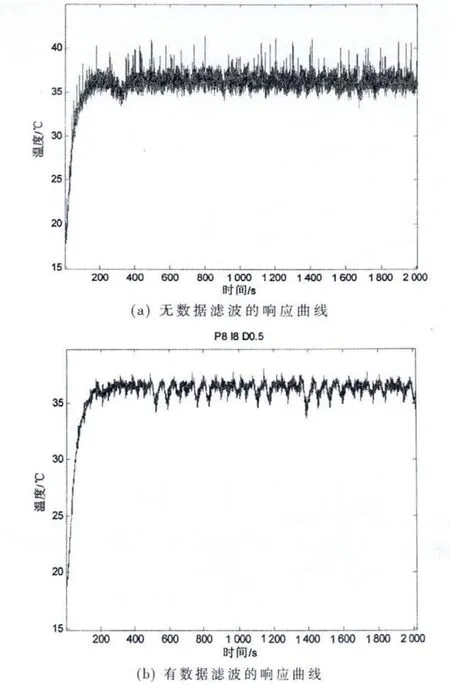
图6 数据滤波对系统响应的影响
PID参数的工程整定方法有很多,通常有经验法、衰减曲线法、临界比例法和响应曲线法等。本文采用经验法中的现场“试凑”法。根据 PID控制器的 P、I、D参数对系统性能(包括及时响应、超调、过冲、振荡等)的影响为理论依据,调试时按照先比例(P)、再积分(I)、最后微分(D)的顺序将控制器参数逐个进行反复的“试凑”,得到多组实验数据。在相同温度下,不同的参数对系统的响应不同。通过大量实验和分析比较,最后确定了温度设定值在126℃时系统的最佳响应,如图7所示。其PID参数为 P=50,I=30,D=20,其响应速度快,60 s达到稳定值,超调量为 2%,误差范围为±1℃,无过大振荡,能长时间保持平稳。

图7 系统最佳响应曲线
本文提出并设计了以TMS320F2812为控制核心、PID控制算法为基础的等离子体催化剂活化装置的温度控制系统。该温度控制系统能稳定运行,具有反应速度快、超调小、无静差、温度控制平稳、精度高等优点。对于温度控制精度要求较高的应用场合,采用DSP和PID算法能快速、有效地实现温度的实时控制,具有较高的灵活性和可靠性。
[1]顾卫钢.手把手教你学 DSP-基于TMS320X281x[M].北京:北京航空航天大学出版社,2011.
[2]汪安民.DSP应用开发实用子程序[M].北京:人民邮电出版社,2005.
[3]Gao Yanli,Liu Di,Zhang Haiying.Beer fermentation temperature control system based on DSP[C].Electronic Measurement&Instruments,2011 10th Interational Conference on(Volume:1),Chengdu,2011(10):274-277.
[4]HAMID N H A,KAMAL M M,YAHAYA F H.Application of PID controller in controlling refrigerator temperature[C].Signal Processing&Its Applications(CSPA),Kuala Lumpur:2009(05):378-384.
[5]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010.
