基于非对称阀控非对称液压缸的前馈干扰补偿器设计
2013-01-29宜昌测试技术研究所郭欣欣郑凤武
宜昌测试技术研究所 郭欣欣 秦 琴 郑凤武
基于非对称阀控非对称液压缸的前馈干扰补偿器设计
宜昌测试技术研究所 郭欣欣 秦 琴 郑凤武
针对非对称阀控非对称液压缸,本文推导了其传递函数。然后为了消除外负载干扰力的影响,根据结构不变性原理设计一个前馈干扰补偿器。最后,分别采用硬件形式和软件形式实现了前馈干扰补偿器,为理论的实际工程应用提供了途径。
结构不变性原理;前馈干扰补偿器;软硬件实现
1.引言
非对称液压缸具有承载能力大、结构简单以及占用空间少等许多优点,在实际中工作中得到了大量的应用(非对称阀控制非对称缸的结构示意图如图1所示)。非对称阀控制非对称缸液压伺服系统存在外负载力干扰信号,而这种干扰信号会降低液压伺服系统的控制品质,并且当干扰信号淹没控制信号的时候,会使系统控制失效,发生故障。针对干扰信号补偿器的设计方法有许多种,本文运用结构不变性原理[1]设计了一种前馈补偿器,以期消除或大幅度抑制干扰信号的影响,并且前馈补偿不会改变系统的极点分布,因此不会影响到系统的稳定性。
图1中:Q1为液压缸无杆腔的流量(m3/s);Q2为液压缸有杆腔的流量(m3/s);PS为供油压力(Pa);P0为回油压力(Pa);A1为液压缸无杆腔的有效作用面积(m2);A2为液压缸有杆腔的有效作用面积(m2);P1为液压缸无杆腔压力(Pa);P2为液压缸有杆腔压力(Pa);FL为折算到活塞杆的等效干扰力(N);Xp为液压缸活塞杆位移(m);m为活塞及负载折算到活塞上的总质量(kg);Xv为阀芯位移(m);Bp为活塞及负载的粘性阻尼系数(kg·m);K为负载弹簧刚度(N/m);w1为非对称阀1、2阀芯窗口的面积梯度(m);w2为非对称阀3、4阀芯窗口的面积梯度(m)。
2.非对称阀控非对称液压缸建模
定义非对称阀的阀芯窗口的面积梯度比n如下:

定义非对称缸有杆腔和无杆腔的面积比 如下:

液压缸在稳定状态下满足牛顿力平衡方程,即:

由上式可定义负载压力PL如下所示:

在活塞杆正反向移动时,滑阀进油口和出油口的节流特性均可单独决定液压缸的静态特性[2],无论活塞杆正向或反向移动,均定义滑阀的负载流量QL如下所示:

在稳态移动的情况下,液压缸两腔的的移动速度应该相同,即下列式子成立:

由式(6)、(7)可知,可以用液压缸无杆腔的流量来描述系统的特性,即在稳态时,负载流量如下所示:

式(5)的定义同时考虑了液压缸两个腔对动态特性的影响,具有相当的合理性,可更方便地分析动态特性[2]。
当活塞杆正向移动时,即 Xv>0时,可推导出负载流量QL的表达式如下所示:

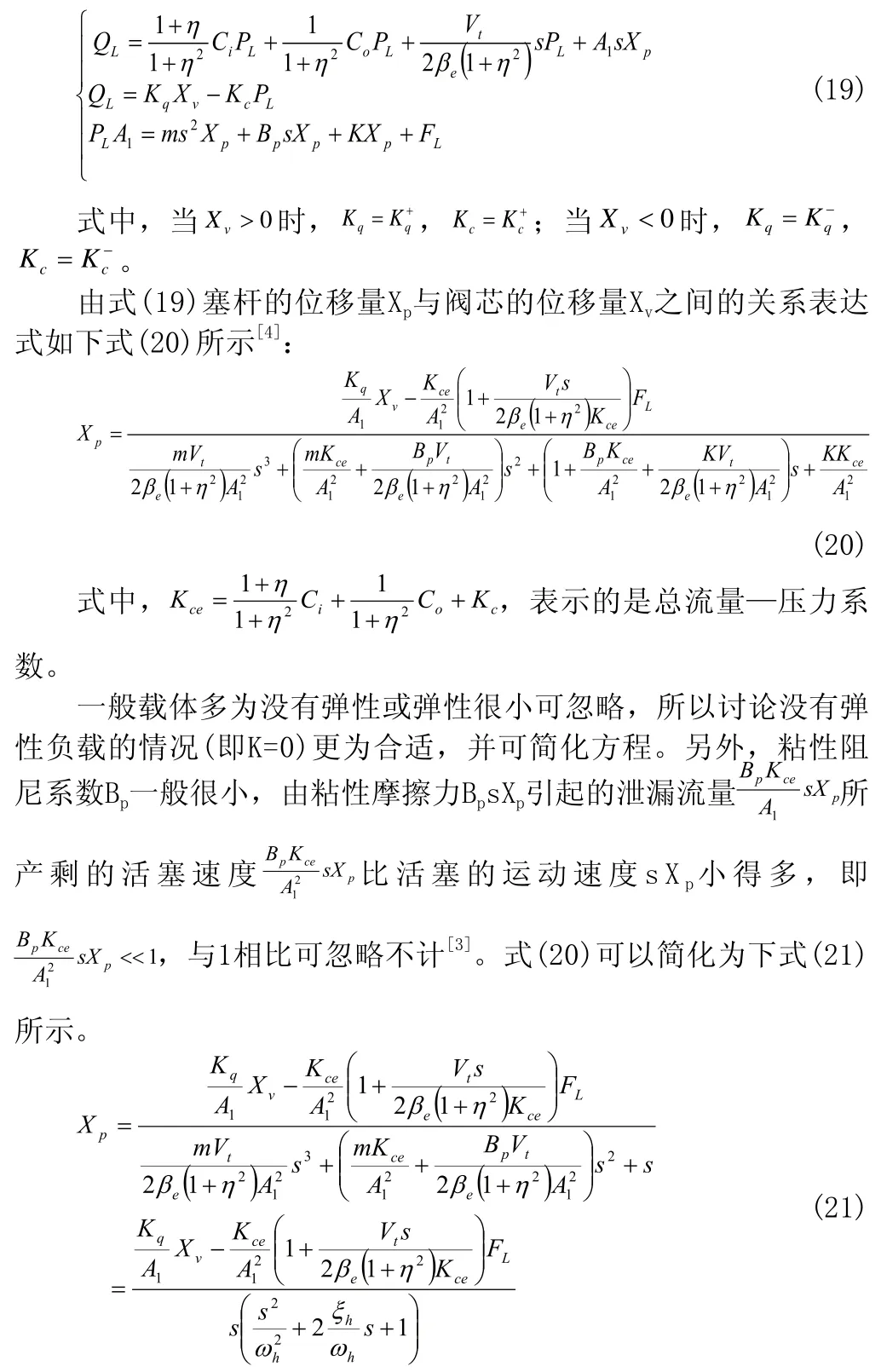
对上式进行泰勒展开,忽略高阶无穷小,可得负载流量的线性化方程为[3]:
对上式进行泰勒展开,忽略高阶无穷小,可得负载流量的线性化方程为[3]:
式中: Kq−表示的是伺服阀的流量增益(m2/s);Kc−表示的是伺服阀的流量—压力系数(m5/N·s)。二者的表达式如下所示:

假设液压缸两腔的初始体积 ,并且活塞该在 Vt2左右移动。根据上述分析,可以得到非对称阀控非对称液压缸的基本方程组如下式所示[2]:

图1 非对称阀控制非对称液压缸结构示意图
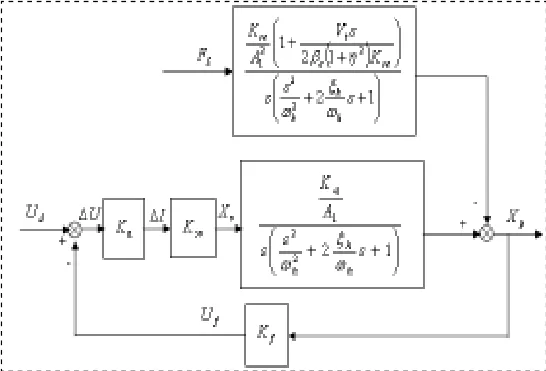
图2 液压伺服系统传递函数结构框图
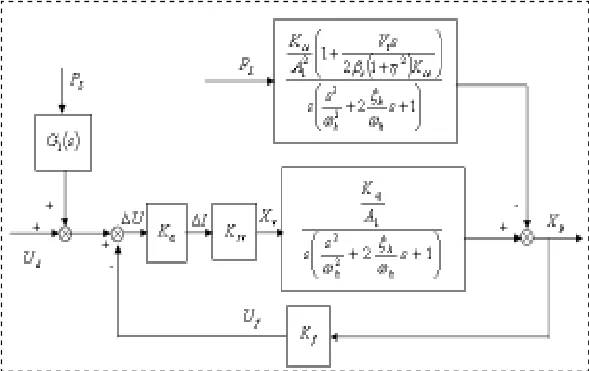
图3 加入前馈干扰补偿环节的系统结构示意框图
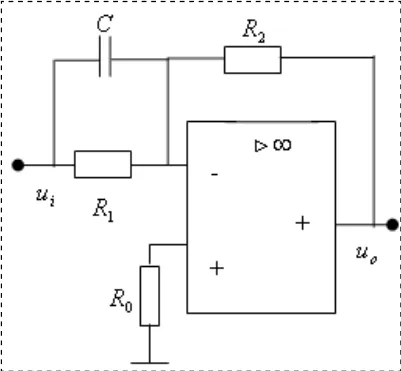
图4 前馈干扰补偿器的硬件实现
液压伺服系统主要是由伺服放大器、电液伺服阀、液压缸、位移传感器和压力传感器组成,用传递函数表示的液压伺服系统结构框图如图2所示。
图2表示的是液压伺服系统的输出信号Xp与控制器的输出信号Ud、外负载干扰力FL之间的传递函数关系。另外,非对称伺服阀的传递函数在理论上可简化为二阶环节,而在实际工程应用中,电液伺服阀多可继续简化成比例环节。可知整个液压伺服系统的输出Xp的拉氏变换表达式为:

3.前馈干扰补偿器设计
所谓的结构不变性原理[1]是指控制系统中的被控信号与干扰信号绝对无关或者在一定准确度下无关,即被控信号完全独立或基本独立。基于结构不变性原理的前馈干扰补偿控制是一种按照干扰进行补偿的开环控制,可增强系统对干扰变化的鲁棒性。前馈干扰补偿控制与液压伺服系统中的反馈控制构成了前馈—反馈控制,这样既可以克服干扰又保证了确定性的要求。
针对外负载干扰力FL设计一个前馈干扰补偿环节G1(s),如图3所示。
令Ud=0,引入观测量PL,忽略Bp和K,可求得前馈干扰补偿环节G1(s)为:

加入上面设计的前馈补偿环节之后,液压伺服系统的闭环传递函数可用下式表示:

4.前馈干扰补偿器的实现
由补偿后的闭环传递函数可知,上面设计的前馈干扰补偿器可以完全消除外干扰力FL对系统输出的影响。在实际应用过程中,此前馈干扰补偿器的实现可分为硬件实现和软件实现。
设计的前馈干扰补偿器为一个比例微分环节,若要用硬件实现,则可用图4中电路进行实现[5]。
根据图4可得输出电压uo与输入电压ui之间的关系式如下式(25)所示:

对上式的两边同时进行Laplace变换,并整理成传递函数的形式如下式(26)所示:

当液压缸的活塞沿不同方向运行时,可选择合适的R1、R2、C进行前馈干扰补偿器的硬件实现。
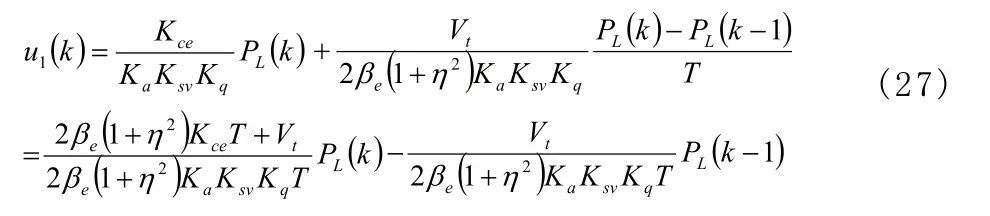
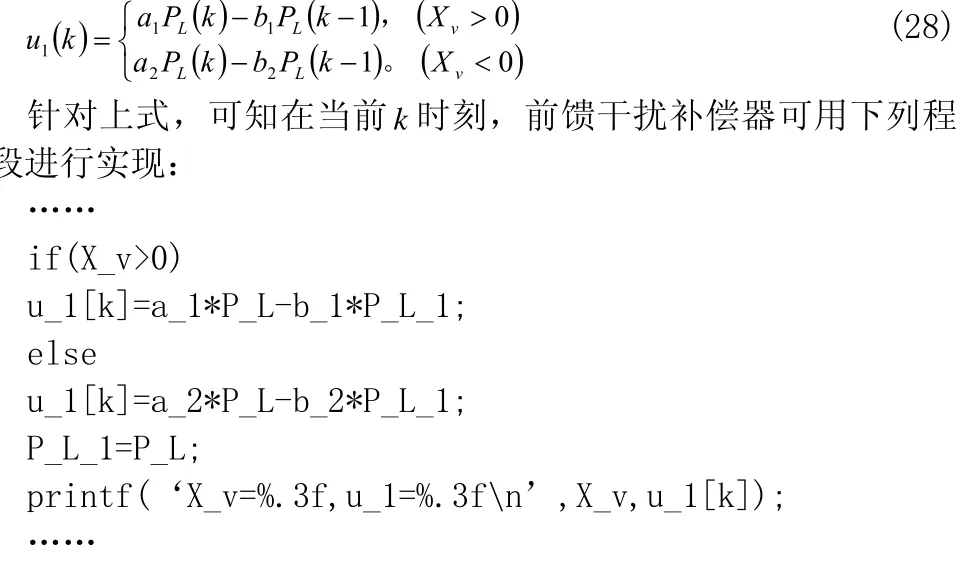
若需要软件实现干扰补偿器,则先将前馈干扰补偿的连续传递函数离散化,即对(23)式进行离散化,若记采样周期为T,则前馈干扰补偿器的当前时刻输出如下式中(27)所示:
在考虑到液压缸活塞的相反运动时相关参数的差异,可将(27)式改写成如下式(28)所示:序
5.结束语
由于非对称阀控非对称液压缸具有很多优点,在工业等领域得到了比较多的应用。针对外干扰力FL,利用结构不变性原理设计了一种前馈干扰补偿器完全消除了其对液压缸输出的影响,这也大大提高了系统的性能。在实际应用过程中,可根据应用环境的不同分别采用硬件和软件两种形式来实现前馈干扰补偿器。本论文针对推导出的非对称阀控非对称液压缸的传递函数设计了一个前馈干扰补偿器的传递函数,又分别通过硬件和软件的方式实现了这个前馈干扰补偿器,为理论的实际工程应用提供来了途径。
[1]刘长年.液压伺服系统的分析与设计[M].北京:科学出版社,1985.
[2]王栋梁,李洪人,张景春.非对称阀控制非对称液压缸的分析研究[J].济南大学学报(自然科学),2003.6,17(2):118-121.
[3]王春林.液压控制系统[M].北京:机械工业出版社,2012.
[4]李东君.基于MATLAB SIMULINK非对称阀控非对称液压缸控制系统的仿真分析[J].机床与液压,2008,36(7):143-146.
[5]沈玉梅.自动控制原理与系统[M].北京:北京工业大学出版社,2010.
郭欣欣(1989—),女,在读硕士研究生,主要从事运动控制等方面的研究。