SPWM逆变电源数字重复控制的改进方案
2013-01-15杨敏杰曹以龙汪文俊
杨敏杰,曹以龙,汪文俊
(1.上海电力学院 电气工程学院,上海 200090;2.上海儒竞电子科技有限公司 研发部,上海 200072)
SPWM逆变是目前世界上应用最广泛的一种逆变电源技术,衡量逆变电源输出电压波形质量的指标主要包括稳态精度、动态响应和总谐波畸变率.由于逆变电源所带的负载大部分为非线性负载,而非线性负载引起的干扰具有周期性,使得输出波形畸变存在重复性,因而利用重复控制的特殊性质能够大大消除输出电压中的谐波成分[1-5].但重复控制无法实现短于一个周期的动态响应,因此系统的动态响应特性较差.无差拍控制响应速度快,自适应性强,能有效消除系统外部干扰,但其稳态特性较差,难以获得很高的控制精度.本文采用一种将重复控制与无差拍控制相结合的控制方案,以TMS320F2407型DSP为主控芯片,对SPWM逆变电源全数字控制系统进行了研究,并通过实验验证了该方案的可行性和有效性.
1 SPWM逆变电源主电路
SPWM逆变电源的主电路如图1所示[3],其中Rr为逆变器中各种阻尼因素的综合等效电阻,滤波电感L与滤波电容C构成低通滤波器.
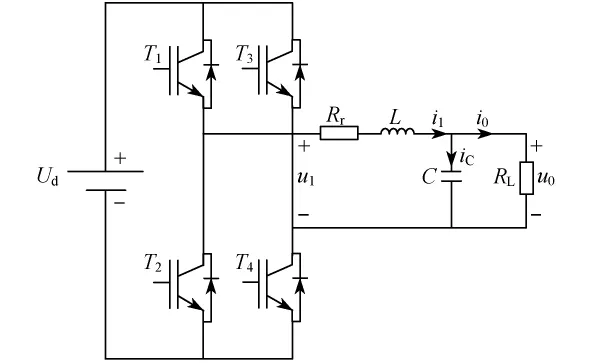
图1 单相逆变电源主电路示意
取u1作为输入,u0作为输出,逆变器的动态特性主要由LC滤波特性决定.由图1可以得出逆变电源输出滤波部分的传递函数为[3]:
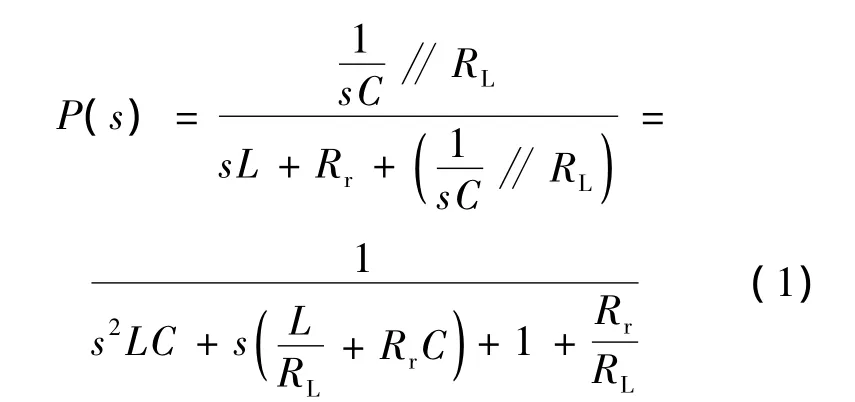
空载时RL→∞,此时将式(1)写成标准形式,即:

2 传统的重复控制
2.1 基本原理
重复控制原理包括以下3个方面:
(1)重复控制器可看作是一个嵌入部件,因此这种系统称为嵌入式重复控制系统;
(2)重复控制器检测原系统的跟踪误差,同时在输入指令的基础上叠加一个修正量来减小误差;
(3)重复控制器只需抑制控制对象对输入指令的跟踪误差,因此一般将输入指令作为前馈环节[6].
2.2 重复控制器设计
嵌入式重复控制系统结构如图2所示[6].
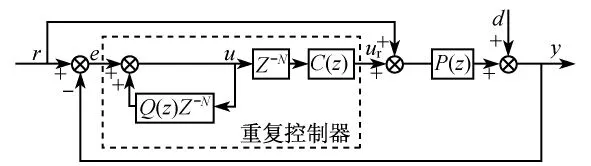
图2 嵌入式重复控制系统结构
(1)Z-N前向通道上串联的Z-N,使当前检测到的误差信号要到下一个周期才作为控制量的一部分对系统产生调节作用,即控制信号延迟一个基波周期输出[1].系统采样频率为 10 kHz,输出电压频率为50 Hz,因此N=200.
(2)Q(z) 理想的重复控制系统中,Q(z)=1,但内模的单位圆上的N个极点使系统处于临界稳定状态.为了增强系统稳定性,Q(z)一般取略小于1的正常数,此处取Q(z)=0.95.
(3)Kr重复控制增益,用于改变内模输出量的幅值,根据经验将其设定为小于或等于1的正常数[1].
(4)zkk为超前步长,此处k=4,超前环节zk用来补偿S(z)和P(z)所引入的相位滞后,使S(z)和P(z)在中低频段接近零相移[1].
(5)S(z) 滤波器S(z)是根据P(z)的特性而设计的,目的是使P(z)中低频段增益为1,提高系统抗干扰能力[1].
3 改进的重复控制方案
本文采用改进的重复控制,即在电压内环的前向通道中将无差拍控制器串联于重复控制器之后,共同对输出电压进行控制.当负载出现大的扰动时,无差拍控制器感受到输入误差的突变并立即产生调节作用,以保证系统有较快的响应速度.在系统处于稳定运行状态时,系统运行所需的控制作用大多由重复控制器提供,以保证系统有较高稳态精度[1].
为了改进重复控制动态响应慢的缺陷,在重复控制中加入了无差拍控制,其控制思想是在k个采样时刻根据历史数据和电路参数预测(k+1)个采样间隔内应有的控制指令,从而保证每拍响应与当前的参考指令一致.改进的重复控制系统电压控制及简化后的电压控制示意分别如图3和图4所示.
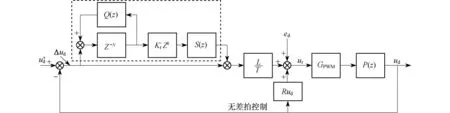
图3 改进的重复控制系统电压控制示意
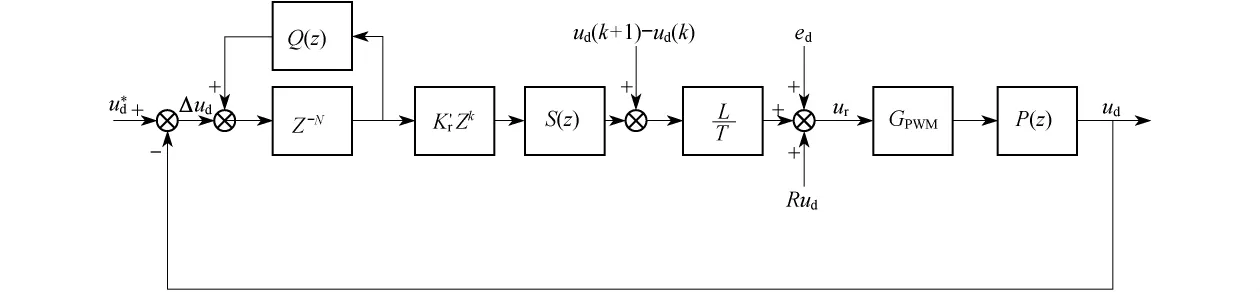
图4 简化后的电压环控制示意
图4中,ud为负载电压,,根据无差拍控制思想,在第k个采样时刻,指令信号可用ud(k+1)代替.在稳定性分析中,ud(k+1)-ud(k),ed,-Rud均可看作外在干扰,因此可将这3项忽略不计.由图4中可以得到改进的重复控制的输入输出关系为:

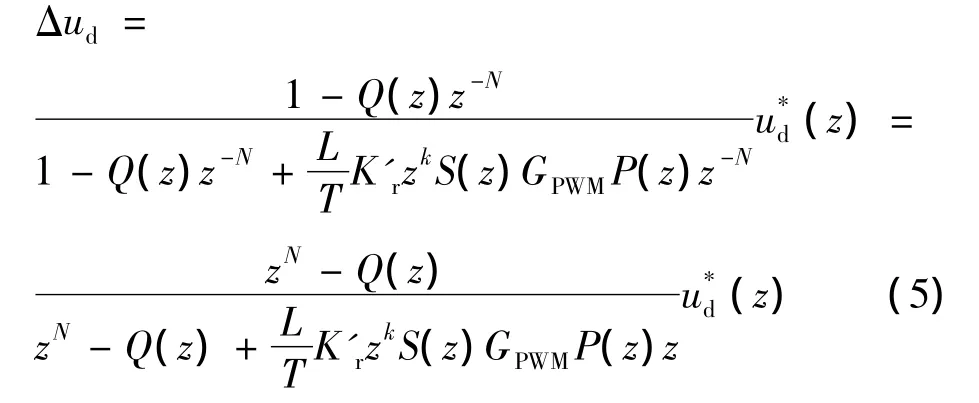
误差Δud(z)可以表示为:

结合式(3)、式(4),得到误差与指令的关系为:


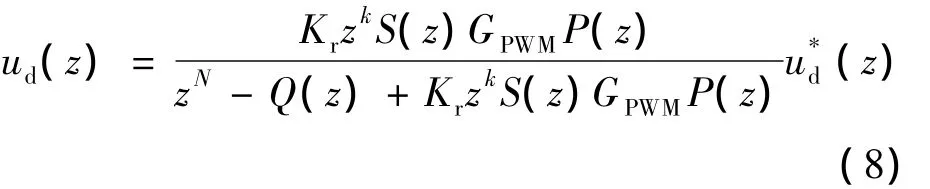
输出电压与指令的关系为:
系统特征方程为:

系统稳定的充要条件是特征方程(9)的N个根都位于以Q(z)所在位置为圆心的单位圆内[7].
4 实验结果与分析
根据上述理论研制了一台基于TMS320F2407型DSP控制的组合式单相逆变电源样机,其整体结构如图5所示.其中直流母线电压为560 V,开关频率和采样频率均为10 kHz,输出滤波电感L=1 mH,滤波电容C=10 μF,单相额定输出功率为6.6 kW,输出电压为210 V,频率为400 Hz.全桥整流负载参数:电容为1 400 μF;电阻为20 Ω.在不同负载下,采用改进的重复控制方案时的输出电压、电流波形见图6.
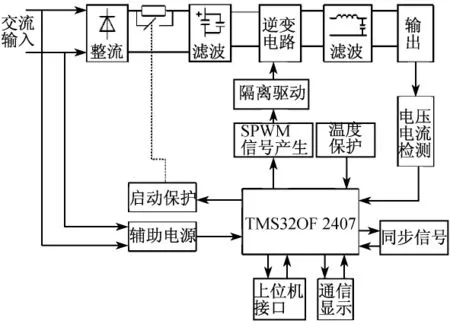
图5 数字控制逆变电源系统结构
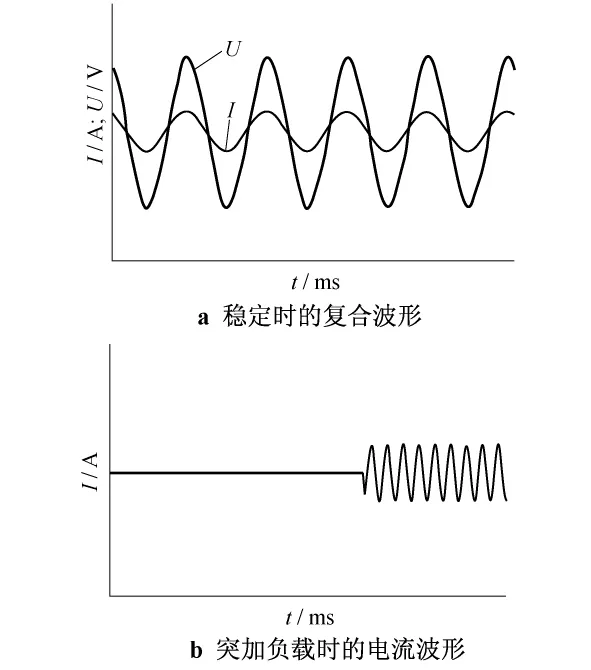
图6 改进的重复控制逆变电源样机实验波形
可见,改进的重复控制对输出电压、电流波形的影响非常明显,系统动态响应明显加快,验证了改进的重复控制策略有利于增强系统动态响应性能.
由实验结果可见,改进的重复控制系统使逆变电源具有良好的动、静态性能,证明了理论分析的正确性.
5 结语
改进的重复控制方案不仅保留了重复控制系统原有的优点,并且弥补了传统的重复控制系统的缺点.该控制方法同时具有良好的稳态性能和较高的动态响应速度.实验结果表明,该方案不仅能获得较低的谐波畸变率,而且具有较强的抗非周期性干扰能力.
[1] 杨豪,赵红军,朱雁南.单相逆变器新型重复-模糊控制方案[J].电力电子技术,2013,47(1):4-6.
[2] 陆帅,李敏远.基于重复控制400 Hz逆变电源数字控制系统研究[J].电力电子技术,2009,43(11):53-55.
[3] 姜洪川.基于重复控制的全数字单相逆变电源研究[J].船电技术,2011,31(1):1-5.
[4] 高军,黎辉,杨旭,等.基于PID控制和重复控制的正弦波逆变电源研究[J].电工电能新技术,2002,21(1):1-4.
[5] 强文,黄西平,王鑫.基于重复控制和无差拍控制的逆变电源数字控制技术研究[J].通信电源技术,2007,24(4):14-17.
[6] 刁元均.基于DSP的逆变电源数字控制技术的研究[D].成都:西南交通大学,2007.
[7] 何鹏.数字逆变电源控制技术研究[D].上海:上海交通大学,2010.
