火灾视频探测中火焰识别算法研究
2013-01-11,
,
(中国船舶重工集团公司第七一三研究所,郑州 450015)
基于图像的火焰识别属于模式识别技术的范畴,是火灾视频探测过程中的核心部分。基于图像的火焰识别是对经过目标区域分割后的灰度图或二值图像进行进一步的分析、处理,提取目标区域中一些符合火焰的特征,用来识别火焰和区分干扰源。火焰的特征有很多种,具体的选择要考虑使用环境、干扰源类型、算法实现难易程度等多种因素,以满足火灾探测的实时性、准确性的要求。在一些区分度很高的应用环境中,判决过程可以采用简单的阈值判别;而在那些图像信息表达不清晰、干扰源多的环境中,则需要设计相应的判决规则,必要时可以考虑使用神经网络算法[1-2]。
1 模式识别
模式识别是指对表征实物或现象的各种形式的(数值的、文字的和逻辑关系的)信息进行处理和分析,以对实物或现象进行描述、辨认、分类和解释的过程。根据是否预先已知目标样本所属的类别,可分为有监督的和无监督的模式识别。在实际应用中,往往无法获得大量已知样本类别信息,因此研究无监督的模式识别十分必要。基于图像的火焰识别是模式识别的一类具体应用,即图像识别。图像识别一般依次分为图像获取及预处理、特征提取、依据判据分类。
火焰识别是火灾视频监控系统的核心部分,其识别率的高低直接影响到整个系统的准确性。而识别率主要取决于所选的火焰特征,需要选择与环境差异大、区分度高的特征作为识别依据。
2 火焰特征提取
可用来进行识别的火焰特征有很多,大体上分为静态特征和动态特征两大类。静态特征包括火焰的形状、颜色、纹理等,而面积变化、火焰闪动、边缘抖动等则属于动态特征。在实际应用中,利用单一特征进行火焰识别是十分困难且不可靠的。大多数的应用都是提取几种火焰与干扰源有明显区别的特征综合利用,加以识别。例如火焰面积变化特征。早期火焰从无到有并有扩大趋势,火焰面积不断增大。但是发光物体靠近摄像头,在图像上表现出来的也是面积增大的特征。因此,需要利用多个特征形成多重判据,才能够提高识别率。
用来进行火焰识别的图像,并不是通过摄像头直接采集的原始图像,而是经过前期预处理的图像,一般为经过目标分割后的二值图像。这是因为原始图像中包含了太多无用的或对识别结果容易产生干扰的信息,滤掉这些信息更便于火焰特征的提取和判别。
使用环境对火焰特征的选择有很大的影响,因为环境不同,存在的干扰源也不尽相同,因此需要适当地调整算法,最大程度地满足火焰探测的快速性和准确性的要求。本文提取火焰的面积变化特征、圆形度等特征来识别火焰。
2.1 面积变化特征

(1)
(2)
n的范围是从某一帧开始的连续10帧图像。每完成一次计算之后,重新取出的图像并不是第11帧到第20帧,而是用第11帧图像代替第一帧图像,以此类推。从而进一步减弱了火焰面积振荡变化带来的影响。
当R(M)>1时,就说明当前目标区域面积有增大的趋势。同时,火灾火焰的面积不会太小,否则也不会造成危害,与蜡烛的小火有明显区别。
2.2 圆形度
圆形度可以用来表征目标区域形状的规则程度。火灾火焰的形状是十分不规整的,而诸如蜡烛、手电筒、灯光等干扰源的形状就要规整得多。因此,圆形度可以用来有效地区分火灾火焰与部分干扰源。
目标区域Ω的圆形度CΩ的计算表达式为
(3)
式中:LΩ——目标区域Ω的周长;
SΩ——目标区域Ω的面积。
目标区域的周长LΩ的计算方法有两种。第一种原理非常简单,就是统计目标区域边缘的像素数。使用这种方法首先需要获得目标区域的单像素边缘图像,每个像素代表相对长度1。这种方法计算的数据不够精确,一些对计算精度要求不是很高的应用均可以采用。另一种方法是采用边缘链码。以8邻域[3]检测获取目标区域边缘链码。算法实现如下。

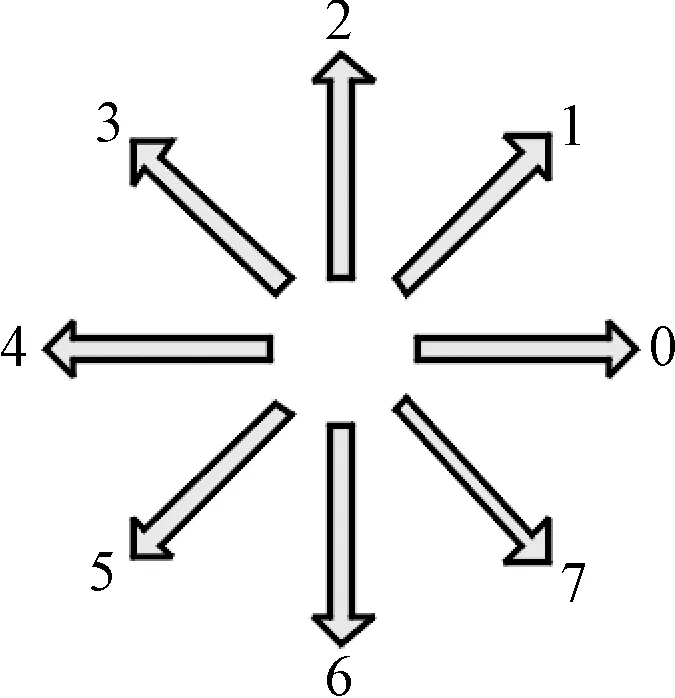
图1 边缘链码方向码
在式(3)中除以4π是为了使结果更易于观察,CΩ越接近1,说明目标区域越接近圆形,边缘越规则,CΩ越大就表示目标区域边缘越复杂。
例如蜡烛、手电筒、太阳光等干扰源,其圆形度非常接近1,而火灾火焰的圆形度一般在2以上,由此可以很容易将火灾火焰与部分干扰源区分开来。
2.3 火焰尖角
火焰尖角也是用来区别火灾火焰与干扰源的主要特征之一。不稳定火焰边缘的抖动特性集中表现为火焰尖角数量的无规则变化。因此不稳定火焰的尖角特征一是火焰尖角的个数较多,二是尖角数量的变化范围较大。可以利用这个特点来区分火灾火焰与干扰源。
火焰尖角的识别需要满足以下两个条件。
1)必须有一个“顶点”,即火焰边缘的一个极值点;
2)尖角的形态为尖而长[4],从“顶点”展开的内角应小于一个角度阈值。
具体算法实现如下。
①顶点的确定。在已知的边缘上寻找这样的点i,它的前、后各N个点的纵坐标都不大于它的纵坐标,且第N个点的纵坐标不大于第N-1个点的纵坐标,即满足式(4)。
(4)
N的取值会对计算的结果产生影响,N越大,满足的条件就越苛刻,符合要求的尖角就会越少;反之则尖角越多。选择适当的N值是十分重要的。通过实验,本文选择N=3。
②角度的计算。以顶点i为中心,前后各间隔M个点取点i-M和i+M,以这三点形成的三角形,则顶点i处的内角可用式(5)~(8)计算得到。
(5)
(6)
(7)
(8)
M应小于等于N。M的取值同样会影响计算的结果,本文选取M=2。当i小于某一个值时,可以认为顶点i处为一个火焰尖角。
这样计算角度会增加算法的复杂度,如果对计算精度要求不高,可使用高宽比粗略计算,计算公式见(9)~(11)。
(9)
d=xi+M-xi-M
(10)
(11)
k的值越大,尖角越“尖”;k的值越小,则尖角越平滑。
太阳光、手电筒、蜡烛等干扰源的尖角数会较少,而不稳定火焰的尖角数会比较多,并且在一个较大的范围内不断变化。
3 结论
本文对同时满足面积变化、圆形度和火焰尖角特征的目标区域判别为火灾火焰,而对仅满足一种或两种特征的目标判别为干扰源。
不仅对于本文上述的几种干扰源可以进行有效区分,对于一些不同的干扰源也同样适用。例如,当手电筒向摄像头移动,目标区域面积同样会增大,但是圆形度和火焰尖角特征均不满足,因此不是火灾火焰。阳光透过树叶形成的反光区域,虽然满足圆形度和火焰尖角的特征,但其面积没有增大的趋势,因此也不是火灾火焰。
如果使用环境中仍存在某些干扰源,同时满足面积变化、圆形度和火焰尖角特征,则本文所涉及的算法就会误识别为火灾火焰,需要增加火焰特征或选择不同火焰特征重新设计。
[1] 孙兆林.MATLAB 6.x图像处理[M].北京:清华大学出版社,2002.
[2] 朱 虹.数字图像处理基础[M].北京:科学出版社,2005.
[3] 胡学龙,徐开宇.数字图像处理[M].北京:电子工业出版社,2007.[4] 董 墨.基于图像处理的火灾探测系统的研究[D].沈阳:沈阳理工大学.2008.
