国外深空探测器着陆缓冲系统的特点和应用
2012-12-29韩鸿硕王一然蒋宇平曹秀云陈杰李静李浩悦李虹琳陈建光
韩鸿硕 王一然 蒋宇平 曹秀云 陈杰 李静 李浩悦 李虹琳 陈建光
(中国航天系统科学与工程研究院,北京 100048)
1 引言
着陆缓冲系统是深空探测器(主要包括月球和行星探测器)着陆的关键子系统之一。着陆器和表面巡视器要实现在目标星上安全着陆,首先必须依靠可靠的着陆缓冲系统。该系统直接关系到深空探测器在目标星上着陆的成败,对探测任务的完成起到极其重要的作用。
着陆缓冲系统又称为着陆缓冲装置或机构,其主要功能包括:①有效缓冲着陆瞬间的着陆载荷;②能够收拢、体装、展开与锁定;③能够保证着陆过程的稳定性,防止着陆器倾覆;④在着陆器着陆后提供长期有效的支撑;⑤可以作为取样返回器的发射支架[1]。正是由于着陆缓冲系统具有这些关键的功能,因而自1966年苏联月球-9(Luna-9)和美国勘测者-1(Surveyor-1)分别成功实现月球软着陆起,该系统的研发就受到了持续的关注。迄今为止,世界各国相继发射了数十个飞往月球、金星、火星以及小行星的深空探测着陆器或试样返回器,其中部分成功实现了软着陆,这不仅实际验证了着陆缓冲系统的功能,也促进了其发展。纵观之,深空探测器着陆缓冲系统从柔性气囊缓冲装置和刚性软着陆机构,一直发展到今天的空中悬吊机(SkyCran),经历了针对任务需求不断改进、提升和创新的过程。
本文在简要归纳国外深空探测着陆器着陆缓冲系统的基本类型和分析其特点的基础上,主要介绍各类系统的组成和应用实例,涉及一些最新的探索研究和相关试验,可为今后中国相关探测器着陆缓冲系统与技术的发展提供参考与借鉴。
2 着陆缓冲系统的基本类型和特点
着陆缓冲装置按照基本构型可分为软着陆机构(着陆架或起落架)、气囊缓冲装置(可充气气囊)和空中悬吊机等。其主要类型如表1所示[2]。

表1 深空探测器着陆缓冲系统的主要类型Table 1 Main types of deep-space explorer landing impact attenuation system
几种着陆缓冲系统各有特点,都有在特定情况下的最佳用途,受到目标星的环境、着陆器的质量、着陆器的工作任务、着陆速度等多种因素的影响。表2列出了3类着陆缓冲系统的基本构成、性能、特点和主要应用[3-4]。

表2 3类着陆缓冲系统的基本构成、特点和主要应用Table 2 Basic composition,characteristics and main applications of three types of landing impact attenuation system
3 软着陆机构的组成和应用
3.1 软着陆机构的组成
软着陆机构一般由着陆架(腿)、缓冲器、足垫、展开锁定机构等组成,各组成部分的主要功能见表3。其中,缓冲器和展开锁定机构是软着陆机构的关键和核心,其性能直接关系到软着陆的成败[5-6]。
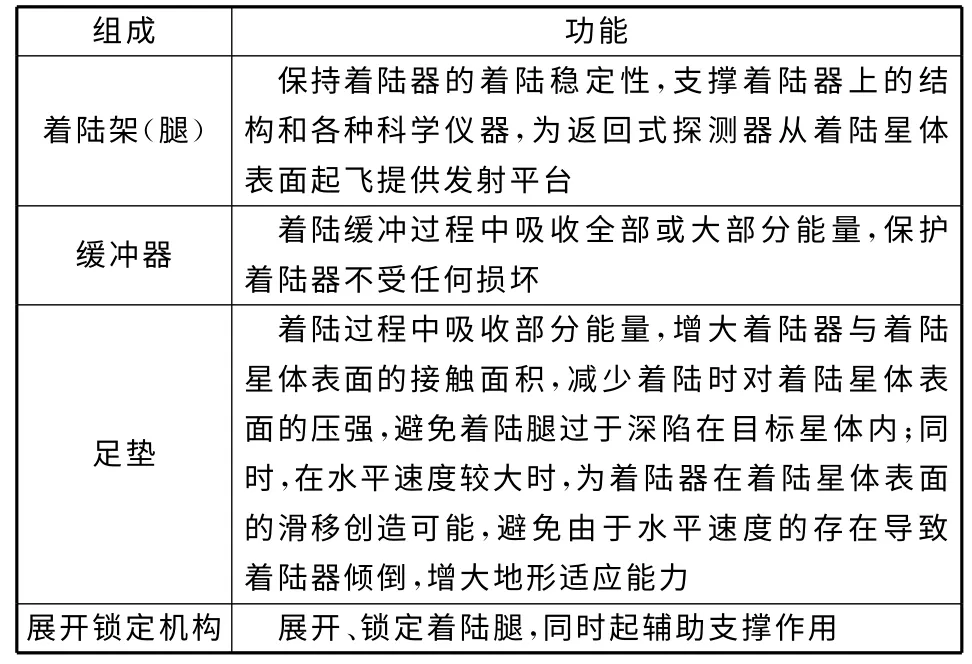
表3 软着陆机构的组成及功能Table 3 Composition and functions of soft-landing mechanism
1)着陆架(腿)
着陆架(腿)又可分为“倒三角架式”和“悬臂梁式”2种类型。两者相比,后者着陆倾覆稳定性更好,可靠性更高,如美国“阿波罗”登月舱的软着陆机构。
2)缓冲器
着陆系统的缓冲器主要包括以下6种类型[6-7]。
(1)液压/气压缓冲器:主要以气体、液体或气体和液体的混合材料为缓冲介质。这种缓冲器缓冲效率高、安全可靠、使用寿命长,可以通过调节流体的压力来调节压缩后缓冲支柱的行程,从而达到探测器着陆姿态自修复的目的。它在前期探月高潮中已应用,美国“勘测者”系列探测器均采用液压缓冲装置,并已获得成功。
(2)金属结构变形缓冲器:利用金属在塑性变形或被切削的过程中吸收和消耗能量,质量和体积都较大。这种缓冲方式一般用于飞船的着陆缓冲,如俄罗斯联盟号飞船座椅缓冲机构的胀筒缓冲器。美国“先驱者”(Precursor)金星探测器和苏联金星号(Venera)探测器也采用了金属结构变形缓冲方法。
(3)铝合金蜂窝缓冲器:主要由主支柱、辅助支柱、支柱轴承等组成,其支柱内部填充蜂窝缓冲材料。这类缓冲器以铝合金蜂窝结构为缓冲材料,蜂窝材料在承受冲击力作用时将产生屈服变形,吸收着陆冲击能量。铝合金蜂窝缓冲器在深空探测领域应用广泛。对月球探测而言,美国“阿波罗”登月舱的缓冲器采用铝蜂窝缓冲器,典型的“阿波罗”登月舱缓冲器由主支柱及辅助支柱组成,每个支柱填充铝蜂窝材料,主支柱将承受月面压缩变形,辅助支柱可承受拉伸和压缩2种载荷变形,如图1所示。苏联LK 系列探测器的缓冲器构成与“阿波罗”缓冲器类似。对于火星探测而言,美国的海盗号火星着陆器和苏联的火星号着陆器也采用了这种铝合金蜂窝缓冲器。

图1 铝合金蜂窝缓冲软着陆装置Fig.1 Aluminium alloy honeycomb impact attenuation soft-landing mechanism
(4)机械式缓冲装置:具有结构简单、不易受到外界影响等优点,在航天缓冲系统中得到了广泛应用。常用的缓冲器主要有纯机械缓冲装置、电动机械缓冲装置和电磁缓冲装置。电动机械缓冲装置结构复杂,而且容易受到供电系统故障的影响;电磁缓冲机构质量过大,且具有与电动机械缓冲系统一样的问题。在当今月球探测高可靠性的要求下,纯机械式缓冲装置得以广泛应用。朱·利(Joo.Lee)等学者设计了一种新型弹簧-齿轮缓冲器,该缓冲器能吸收很高的着陆冲击能量,可反复多次使用,着陆后自动进行着陆自修复操作。其内部结构主要通过弹簧压缩来吸收着陆冲击能量,利用齿轮装置使缓冲器分阶段逐步吸收和释放能量。
(5)磁流变液缓冲器:磁流变液是由非胶体的细小颗粒分散溶于绝缘载液中形成的、随外磁场变化而可控制其流变行为的稳定悬浮液。磁流变液缓冲器是将磁流变液作为阻尼材料制成的缓冲器,利用磁场变化改变液体黏度而得到所需缓冲阻尼力,从而实现着陆缓冲。磁流变液具有黏度能够连续可逆变化、应力场强、工作温度范围宽、稳定性好,以及对现有的液压系统的兼容性好等优点,磁流变液缓冲器具有体积小、质量小、缓冲后可恢复、结构较为简单、可靠性高、可控性强等优点。目前,该缓冲器还处于实验室研究阶段,没有真正投入实际使用。
(6)金属橡胶缓冲器:利用金属丝之间的摩擦来消耗能量,在高温、高压、高真空、超低温和剧烈振动等环境中仍能保持工作能力。目前,这种缓冲器也处于研究阶段。
上述几种着陆缓冲器的主要性能及应用比较,如表4所示[4,6-7]。

表4 几种着陆缓冲器的主要性能及用途比较Table 4 Main properties and applications of several types of landing impact attenuation
由表4可见:
(1)液压/气压缓冲器因为缓冲材料单一,在月球环境下缓冲特性与地球表面差别不大,缓冲过程较平稳,中途没有反弹,效率高,而且缓冲后具有可恢复性,有利于调节探测器着陆后的姿态,但质量大、结构较复杂,在初期探月中应用较多。
(2)铝合金蜂窝缓冲器具有质量小、结构简单、缓冲行程长、工作温度宽、工作可靠等优点,在深空探测着陆器中应用广泛,尤其是用于“阿波罗”登月舱。
(3)金属变形缓冲器和各种机械式缓冲器质量较大,性能及其稳定性一般,用途有限。
(4)磁流变液缓冲器采用新型可控有源液压阻尼技术,具有体积小、半主动控制、恢复快、输入功率低、易安装和可靠性高等优点;金属橡胶缓冲器具有结构简单、质量较轻、不易反弹、性能对环境不敏感等优点。目前,这两项技术仍不够成熟,因而尚未获得实际应用。
3)足垫
足垫位于每条着陆腿的末端,一般呈圆盘形,它通过球形铰链与主支柱相连。足垫一般由铝合金蜂窝材料制成。对于登月舱而言,大直径的足垫可以保证其在较软的月面着陆时不会因冲击而造成深度下陷。即使冲击较大时,足垫也可以起到缓冲作用。
4)展开锁定机构
展开锁定机构是由展开机构和锁定机构组成的。展开机构的作用是当探测器开始着陆的时候将着陆腿展开到工作位置,并且在着陆腿展开后对着陆腿起到刚性支撑的作用。
3.2 软着陆机构的应用实例
以下主要介绍美国“勘测者”、“阿波罗”、苏联月球-17等月球着陆器,美国海盗号、欧洲“火星生物学”等火星着陆器,以及欧洲“贝皮-哥伦布”水星探测器的着陆缓冲系统。
3.2.1 “勘测者”的着陆缓冲系统
美国勘测者-1~7于1966-1968年发射,其中5次成功在月球着陆。“勘测者”探测器系列的着陆缓冲系统是一种液压缸和活塞装置,用以提供所需的减震(阻尼)和弹簧作动。该着陆系统在整个勘测者计划中取得非常成功的应用效果[8]。其设计受到下列基本要求的约束:①探测器在一个坡度为15°的表面着陆后,必须以预先确定的相对于地面的姿态静止不动;②探测器最大着陆质量为294.3kg,规定峰值着陆速度为6.28m/s;③在探测器重心上的着陆冲击,垂直方向不超过30gn,水平方向不超过12gn;④在从表面隆起10.16cm的高度内,重要部件不能发生损伤;⑤着陆缓冲系统的目标质量约为探测器着陆质量的5%。
1)系统组成
“勘测者”着陆缓冲系统的着陆架由3条倒三角型着陆腿和3个安装在探测器构架下面的压缩模块(由铝蜂窝材料制成的圆筒形部件)组成,着陆腿具有可压缩铝合金蜂窝足垫。三腿着陆架的单腿组件见图2[9]。

图2 “勘测者”三腿着陆架的单腿组件Fig.2 Single leg assembly of Surveyor three leg landing gear
3个管状着陆腿元件的上部含有缓冲器组件。2个刚性的下部着陆腿元件彼此交叉支持,被铰接到探测器构架上;在触地时,它们向上旋转,压缩缓冲器圆柱。缓冲器的功能是减小探测器的着陆撞击,并消散探测器在首次触地时的剩余动能(满足要求②和③)。此外,为了获得探测器构架相对于月面的位置,要求弹簧作动,以在撞击后再次伸展着陆腿(满足要求①)。
足垫下部由挤压强度为68.9kN/m2的钛合金蜂窝构成。足垫的主要功能是防止缓冲器支柱在撞击时承受过度的横向载荷。再加上挤压强度为275.6kN/m2的压缩模块,保证在整个触地期间在构架与着陆平面之间至少有10.16cm 的地面间距(满足要求④)。因此,缓冲器必须具有基本消散全部着陆能量的能力,而进一步的着陆能量消散将基本集中在缓冲器弹簧组件上。“勘测者”的着陆器缓冲器采用液压弹簧,液压弹簧组件的工作原理见图3。当具有穿孔的活塞被推进一个完全充满液体的圆筒中时,流体的容积由于活塞杆进入而越来越减少,也就是说,流体被压缩,导致压力增加。
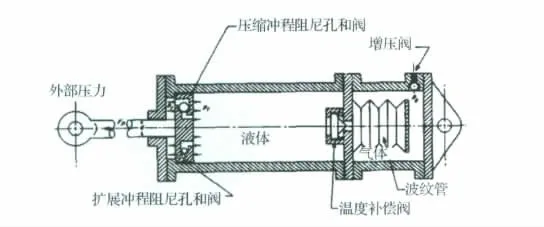
图3 “勘测者”减震弹簧组件的工作原理Fig.3 Operation principle of Surveyordamping spring assembly
2)缓冲器设计
“勘测者”系列着陆器采用2 种缓冲器设计。第1种设计的缓冲器外部尺寸为5.08cm,在伸展位置上连接点之间的距离为95.32cm,质量约为1.77kg,基本结构材料采用普通钛合金,勘测者-1、2采用这种设计。第2 种设计与第1 种设计的原理和基本构型相同,但在一些重要细节上有显著变化,基本结构材料采用钛合金Ti-6Al-4V,其脆性和缺口敏感度要小得多,并且易于机械加工和焊接,勘测者-3、4采用这种设计。
勘测者-1 在月球着陆期间,其缓冲器装置的性能很令人满意,但是反弹比预计更加明显。它以稍低于标定速度(3.84 m/s)的垂直着陆速度(3.54m/s)在月面着陆,其倾斜度在2°的水平之内。所有“勘测者”着陆器都经历了反弹,采用第2种设计的缓冲器装置由于在液压弹簧中弹簧速率增加,反弹稍高一些。勘测者-7 在撞击瞬间比勘测者-1 的反弹要强烈得多,前者的足垫在反弹期间跳过14.73cm,而后者的反弹高约24.38cm。勘测者-7在稍斜的地面(倾斜度约为3°)上着陆,垂直着陆速度为3.81m/s。
3.2.2 美国“阿波罗”登月舱的着陆缓冲系统
美国阿波罗-11~17于1969-1972年发射,并6次成功实现载人登月。“阿波罗”登月舱着陆架(landing gear)的设计经历了由“倒三角架型”向“悬臂型”的转变。悬臂式着陆架的底部半径为424.2cm[10],主要部件如图4所示,着陆腿(landing leg)的收拢和展开位置如5所示。

图4 “阿波罗”登月舱着陆腿Fig.4 Landing gear leg of Apollo lunar module

图5 “阿波罗”着陆腿的收拢和展开位置Fig.5 Positions of stowed and deployed Apollo landing gear leg
1)系统组成
“阿波罗”登月舱的着陆缓冲系统包括4个分离的着陆腿,每个着陆腿组件由主支柱、辅助支柱、展开桁架、展开与锁定机构、月面传感器和足垫组成。每个着陆腿组件的1个主支柱和2个辅助支柱都具有能量吸收能力。展开桁架是着陆腿的支柱与下降级结构之间的结构-力学组件。每条着陆腿利用钛条保持收拢状态。当火工闭锁装置点火时,连接到主支柱和辅助支柱上的钛条断开,允许着陆腿由位于其组件每侧的机构展开和锁住。
(1)主支柱。着陆架每条腿组件上的主支柱(见图6)由下面的内部圆筒装入上面的外部圆筒组成,承受在触地时的压缩撞击。该主支柱在非撞击位置上长约3.05m,其中包括一个连接到登月舱下降级外部悬臂支架组件上的“外部圆筒上通用配件”和一个连接到足垫上的“内部圆筒下球形接头配件”。在内部圆筒中装有吸能材料(一种可压缩铝合金蜂窝)。该支柱在上端通过通用配件连接到登月舱下降级悬臂支架组件上,而足垫通过球形接头配件连接到内部圆筒的下端。主支柱结构的安全系数为1.35,而所有配件上的安全系数为1.50。主支柱由7178型铝合金制成;内部圆筒的标定直径为14.0cm;壁厚范围是从靠近球形配件处(此处设计弯曲力矩较小)的0.38cm 到靠近外部圆筒结合点处(此处设计弯曲力矩大于33 895N·m)的0.65cm。
(2)辅助支柱(见图7)。它类似于主支柱的基本设计,也由内部和外部圆筒组成,在撞击时内部圆筒滑动进入外部圆筒,能够经受拉伸和压缩撞击。外部圆筒通过球形或插座接头连接到主支柱的插孔(凹槽)上,而内部圆筒则通过端部通用配件连接到展开桁架组件上。在内部和外部圆筒中都装有蜂窝冲击与吸能材料,这种材料具有标定的载荷/撞击特性。辅助支柱未被撞击时长约1.22m,外部圆筒直径约为11.43cm。这些支柱圆筒由2024型铝合金制成;壁厚范围从外部圆筒的0.069cm 到内部圆筒的0.084cm。

图6 “阿波罗”着陆腿的主支柱Fig.6 Primary strut of Apollo landing gear leg
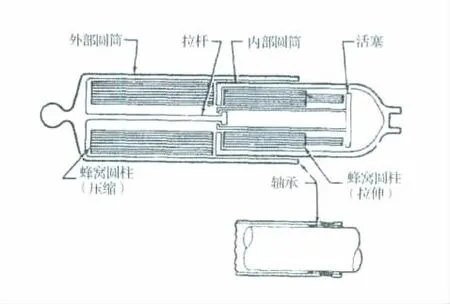
图7 “阿波罗”着陆腿的辅助支柱Fig.7 Secondary strut of Apollo landing gear leg
(3)展开桁架(见图5)。它由2个主横梁和4个侧梁组成。在展开位置,该桁架作为一个刚性结构作动,而辅助支柱连接在它上面。着陆腿展开与锁定机构连接到展开桁架上,并在该桁架下部侧梁上牵引,以展开整个着陆架组件。展开桁架的上部侧梁锁入连接到下降级结构上的锁定机构。展开桁架的主要部件都是由7079型和7278型铝合金制成的。
(4)展开与锁定机构。它执行两项不同的操作:通过连接到展开桁架上的悬臂展开着陆腿;在完成展开后原位刚性销住着陆腿。锁定机构分为上位锁定机构和下位锁定机构。上位锁定机构由锁带和锁机组成,其作用是在探测器发射和空间飞行的过程中将着陆腿固定在收拢位置;当探测器开始着陆时,上位锁定机构解锁,使着陆腿顺利展开到工作位置,此时下位锁定机构开始起作用,将着陆腿固定在工作位置。
(5)足垫。它按照6.89kN/m2的静态承载强度表面设计,以支撑登月舱,在接触月面、撞击岩石或礁石后仍能维持其功能。该足垫呈碟形,直径为94.0cm,厚度约为17.8cm。其结构是将铝合金蜂窝粘结到经过机加工的铝合金盖板上。7075型机加工铝合金盖板厚度范围:足垫下表面的盖板厚度为0.021 6~0.041 9cm;足垫上表面的盖板厚度为0.021 6~0.127 0cm。足垫芯部结构为2024型和5052型铝合金蜂窝。该足垫通过一个球和凹槽接头连接到主支柱上(见图8)。足垫在触到月面之前,通过4条在足垫中心和主支柱端部配件之间连接的束带限制移动。在接触月面时,这些束带断开,从而使足垫按照滑动需要而转动。按照设计,该束带在受到377.4N·m 的力矩时失效,以便转动足垫。足垫结构为铝合金蜂窝粘结到机加工铝合金盖板上,足垫可经受由于撞击岩石、月坑、暗礁和类似物体所引起的重大损伤。

图8 “阿波罗”着陆腿的足垫图8 Footpad of Apollo landing gear leg
2)缓冲工作
着陆架是着陆器的关键部件,而各条着陆腿又是着陆架触地的关键组件。美国在“阿波罗”登月计划中进行了全面的着陆动力学试验。用于全比例试验的着陆架是早期登月舱4.1 m 半径着陆腿的改型。4个着陆腿组件都由1根主支柱(在其下端有足垫)和2根辅助支柱组成。支柱由7075-T6铝合金制造。主支柱由内部圆筒和可压缩铝合金蜂窝圆柱组成,后者通过压缩来吸收能量。每根辅助支柱由内部圆筒和内置蜂窝圆柱组成,其中内部圆筒通过袖筒式枢轴万向接头连接到主支柱的外部圆筒,而内置蜂窝圆柱则可以在双作动辅助支柱延长或缩短时吸收能量。辅助支柱的力学设计是:当拉伸撞击时,1个蜂窝圆柱被压缩;当压缩撞击时,另1 个蜂窝圆柱被压缩。所有支柱都是排气的,以使空气诱捕最小。在阿波罗-9~11 的任务中进行了登月舱着陆架(腿)的展开和降落验证试验。
3.2.3 苏联月球-17着陆器的着陆缓冲系统
苏联月球-17于1970年11月发射,其着陆器的着陆缓冲系统采用着陆腿装置。
1)系统组成
着陆腿装置由4 条着陆腿组成,如图9 所示。每条着陆腿都由V 形支柱、缓冲器和足垫组成。支柱和缓冲器的末端铰接到着陆器上,而缓冲器的另一端和足垫铰接到支柱的自由端上。
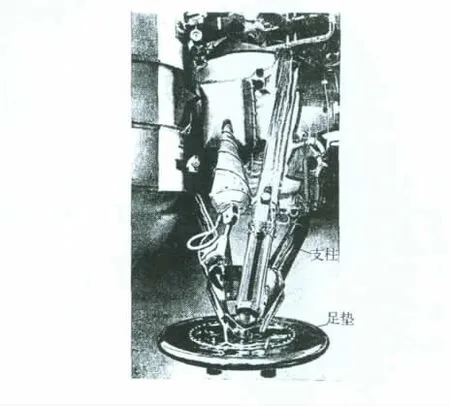
图9 月球-17的着陆装置Fig.9 Luna-17landing gear(leg)
(1)支柱。支柱连到着陆器的每个接头上都装有拉伸弹簧,以及在着陆腿收拢与展开时测量支柱角度的遥测传感器。
(2)缓冲器。着陆腿的缓冲器由2个套管组成,内部装有一次性的无反冲阻尼器件。在着陆装置从初始状态转变到工作状态的展开过程中,该器件不会妨碍缓冲器的收缩,只有在着陆过程中缓冲器收缩时才发挥作用。
(3)足垫。着陆装置的足垫是空心的,其边缘部分的主要用途是承受正常载荷,另一个作用是吸收一部分着陆器在崎岖的月面水平方向移动产生的冲击能量。足垫的中心与着陆腿支柱铰接,以适应月面的土壤。铰链侧面装有2个接触变换器,使其能够与任何强度和任何构造的土壤紧密贴合。
2)缓冲过程
在着陆器按照时间-程序设备指令与运载火箭最后一级分离之前,着陆腿展开至工作状态;支柱角度遥测传感器发出展开过程的信号。在着陆器与月面接触时,吸收着陆冲击能量的着陆腿缓冲器压紧,压缩程度通过支柱的角度遥测传感器测出[11]。
3.2.4 美国新型月球机器人着陆器的着陆缓冲系统
2010年,美国国家航空航天局(NASA)为“机器人月球着陆器项目”(RLLP)而研制了新型机器人着陆器,并在马歇尔空间飞行中心(MSFC)进行了一系列试验。该项目由NASA 科学任务理事会行星科学分部负责,着陆器样机将帮助NASA 研制用于无风天体(如月球和小行星)的新一代小型、灵巧和通用的着陆器。着陆器的设计基于一种允许在高度危险但高度优先的区域精确着陆的前沿技术,从而使NASA 能够探测以前从未探测过的地区达到科学与探测目标[12-13]。
1)系统的集成与试验
2011年1月,NASA 在位于亨茨维尔的Teledyne布朗工程(TBE)设施上成功对新型机器人着陆器进行集成,并完成了系统试验。该着陆器置于改进的滑板上,在样机传感器、机上计算机和推进器的最终试验期间,一个定制的低成本轨迹跟踪系统用于对运动进行控制,如图10所示。功能试验的重点在于保证所有系统部件能无缝工作,以便对着陆器的运动进行感知、通信和指挥。随后进行了捷联试验,然后再进行自由飞行试验。

图10 置于改进滑板上的NASA 机器人着陆器样机Fig.10 NASA’s robotic lander prototype on modified skateboards
2)自由飞行与着陆试验
2011年6月16日,该项目进行了机器人着陆器样机(见图11)的第2次自由飞行试验。在试验期间,着陆器完成了所计划的飞行程序,先是自主上升进行1.83 m 的悬浮,然后下降进行可控制的软着陆。机器人着陆器样机装有99.8kg的过氧化氢推进剂。它依靠2个传感器进行操作:一个是用于跟踪着陆器的加速度及其指向的惯性测量装置,另一个是用于测量高度的雷达高度计。
后续还计划进行更多的自由飞行试验,可能使机器人着陆器上升到30.5 m,历时达60s。通过多次试验飞行,该着陆器将越加稳定,飞行时间更长,并将演示验证:其控制运算法则能够维持稳定姿态,并能利用该系统的脉冲推进器进行软着陆。其关键技术之一是一组小型、有效、推动的而不是节流的推进器。这些试验将辅助设计与研制新一代的小型、灵巧、多功能机器人着陆器,这些着陆器能够在太阳系中多颗目标星上进行科学与探测研究。

图11 NASA 机器人着陆器的自由飞行试验Fig.11 Free-flight test of NASA’s robotic lander
3.2.5 美国“梦神”着陆器的着陆缓冲系统
美国“梦神”(Morpheus)着陆器是一种可垂直起降的行星着陆器方案。该项目始于2010年6月,是NASA“先进探测系统”(AES))计划的20个项目之一,由NASA 的约翰逊航天中心(JSC)监管。该项目的主要目的是研发和试验一个能垂直起飞和着陆的原型行星着陆器,作为先进航天器技术的试验平台,在将来能运送载荷到月球或太阳系其他星体,具备携带500kg载荷到月球的能力[14]。
该项目中的集成垂直试验台(VTB)平台主要集成与演示验证液氧(LOX)/液体甲烷推进系统,以及自主着陆与避险(ALHAT)技术;能对制导、导航与控制(GN&C),推进,着陆缓冲,电源和电子设备分系统概念进行试验,演示验证多种技术。VTB系统由试验飞行器、地面系统和操作系统等组成。试验飞行器如图12所示,其干质量约816.5kg,当进行一次持续工作50s的发动机或飞行试验时湿质量约为1270kg。其主要结构包括焊接的铝合金箱式梁、机加工零件和一块金属板。着陆支柱在足部带有蜂窝压碎衬垫,以缓冲着陆载荷。
“梦神”着陆器的试验包括热点火试验、绳系试验和自由飞行试验。在2011 年4-8 月,共进行5次热点火试验和6次绳系试验。2012年8月9日,“梦神”在进行首次自由飞行试验时,由于起飞后硬件组件出现故障,样机无法维持平稳飞行而坠毁。

图12 “梦神”着陆器试验飞行器Fig.12 Morpheus lander test vehicle
3.2.6 美国海盗号火星着陆器的着陆缓冲系统
海盗号火星轨道器/着陆器于1975年发射,并成功实现火星着陆。其着陆器的着陆缓冲系统主要包括气动缓冲(减速)装置和着陆腿组件[15]。
1)气动缓冲装置
气动缓冲装置提供升力进入火星大气,它由气动壳体、底盖、降落伞和降落伞发射器,以及发射器支架等组成,如图13所示。
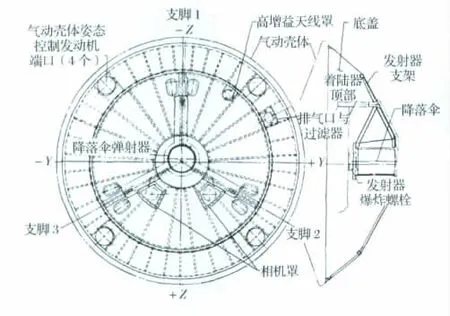
图13 海盗号着陆器的气动缓冲装置系统结构示意图Fig.13 Viking lander aerodecelerator system
2)着陆腿组件
海盗号有3条着陆腿。该着陆腿如图14所示,它包括1个主支柱组件和1个A 型支架组件,后者包括每条腿的足垫。在该支柱中采用粘接的可挤压铝蜂窝,用于着陆时的缓冲。A 型支架的内侧端通过载荷限制器连接到海盗号着陆器本体上。在施加限制载荷时,载荷限制器发生塑性弯曲,这样海盗号的本体及其设备就能得到保护。
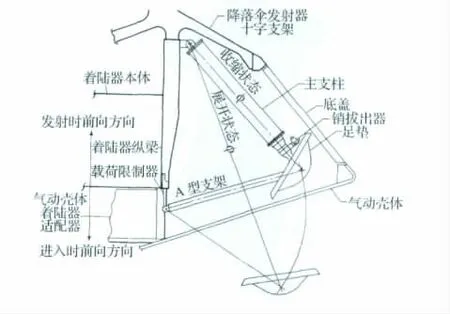
图14 海盗号着陆器的着陆腿Fig.14 Viking lander landing leg
4 气囊缓冲装置的组成和应用
气囊缓冲装置又称为“可充气气囊”。气囊缓冲是一种使着陆器被气囊包围并回弹,直到动能完全消散的着陆缓冲方式。气囊缓冲装置适于在地形条件未知的条件下使用,同时适用于着陆质量和体积都较小且不再返回的探测器的软着陆[7]。表面仪器和巡视器是以成本有效和可靠的方式在行星表面着陆的候选者,着陆质量预计范围为100~1000kg,正好在气囊的能力之内[16]。
4.1 组成
气囊组件一般由单个或数个气囊组成,而每个气囊又由多个驼囊组成。整个气囊系统主要包括气体发生器、气囊材料与结构件以及展开与回缩机构等。着陆器与气囊系统由筋腱连接。
(1)气体发生器用于产生气体,以对气囊进行充气。
(2)气囊构型包括简单的球形和圆柱形,较复杂的单圆或双圆环型,以及仍然较复杂的平底形。拟用于“猎户座”(Orion)的平底形气囊构型如图15所示,水平圆柱形气囊环构型如图16所示[16]。

图15 平底形气囊Fig.15 Flat bottom airbag

图16 水平圆柱形气囊环Fig.16 Ring of horizontal cylindrical airbags
(3)气囊材料是制造气囊的关键,对气囊系统的功能具有决定性作用。它主要包括囊胆(球瓣)层材料、约束层材料和磨损层材料,其中囊胆材料主要是涂敷硅酮的维克特兰(Vectran)聚乙烯织物。
(4)气囊结构件主要包括接缝结构、接缝密封、筋腱结构、气囊与着陆器的接口、气体清除部件以及气囊增强件等。
(5)包装与展开机构用于气囊的收拢包装和充气展开。
(6)回缩与释放系统用于气囊的回缩和着陆器或巡视器的释放,它由安装在着陆器上的绞盘和轻质维克特兰绳索组件组成。
4.2 气囊缓冲装置的应用
主要介绍美国“火星探路者”、“火星探测巡视器”(包括勇气号和机遇号)、欧洲“火星生物学”等火星着陆器,以及欧洲“贝皮-哥伦布”水星探测器的着陆缓冲系统。
4.2.1 美国“火星探路者”的着陆缓冲系统
美国“火星探路者”着陆器/巡视器于1996 年12月发射,并在火星成功着陆。此探测器采用气囊着陆缓冲系统,该系统由NASA 的喷气推进实验室(JPL)负责设计,由ILC 公司负责研制[17]。气囊缓冲系统主要由气体发生器和气囊组件构成。系统总质量约为99kg。
1)气体发生器
气体发生器的质量为3.25kg,装在一个双锥形的钛合金壳体内,如图17所示。该装置分两个阶段燃烧其推进剂:主火药柱以高速燃烧1.85s,用于气囊充气;维持药柱以低速燃烧20s,用于在着陆期间的气体补足。全部气体在放气前都通过一个冷却剂室冷却。
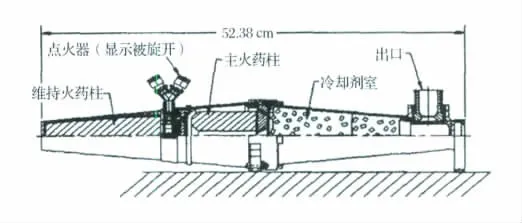
图17 “火星探路者”的气体发生器Fig.17 MPF gas generator
2)气囊组件
实际的气囊系统组件如图18所示,而单个的气囊组件构型如图19所示。每个气囊组件由6个直径为1.8m 的球形舵囊、一个着陆器面板和大量子部件构成。各舵囊中心距气囊中心1m。一个内外筋腱系统限制隔膜载荷,增强气囊系统,并将其连接到着陆器上。该气囊采用多层气囊结构:一个有涂层的织物囊胆层(用于容纳气体并承受由压力引起的膜载荷)和多层覆盖层(用于防止侵蚀、刺穿和撕裂)。囊胆材料是涂敷LT50低温硅酮橡胶的维克特兰聚乙烯织物(布)。维克特兰是一种液晶聚合物纤维,由于它的纱线坚韧性可与凯夫拉-29(Kevlar-29)媲美,因而具有更好的折曲破裂/侵蚀抗力。磨损层则是一种无涂层的维克特兰织物(布)。

图18 “火星探路者”的气囊系统组件Fig.18 MPF airbag system assembly
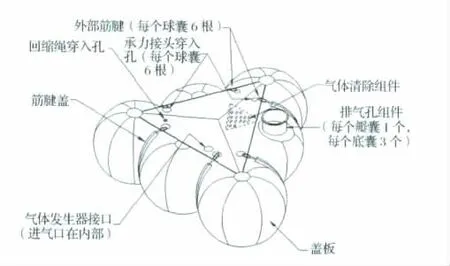
图19 “火星探路者”的单个气囊组件Fig.19 MPF airbag assembly
“火星探路者”气囊系统有约440m 长的接缝,主要接缝如图20所示。它是一种宽1.6cm 的咬口折缝,采用200 旦尼尔3 层维克特兰线,通过4 行301型缝制来连接,每厘米有25~51个针脚。这一接缝结构的试验强度在25 ℃时为437.8N/cm,在-80 ℃时为735.5N/cm,这足以承载贯穿整个气囊的膜载荷;由气囊-气囊界面所引起的应力集中区域采用局部增强。接缝通过附加一种3.18cm 宽的轻质硅酮涂敷布带进行气体保持,这种布带在整个接缝上原位固化。
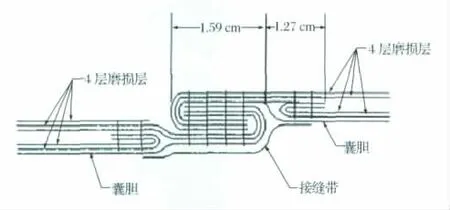
图20 “火星探路者”气囊的主要接缝结构Fig.20 MPF airbag primary seam construction
筋腱组件包括高强度纤维带或绳,最大筋腱载荷约为771.1kg,所选结构是具有低捻度的3×3铺层绳,维克特兰-HS 用于外部筋腱,而凯夫拉-129用于内部筋腱。筋腱用像绳一样强的索限(环扣)终结,连接到着陆器每一面6个位置的U 形销上。
回缩系统由安装在着陆器上的绞盘和轻质维克特兰绳索组件组成。它在侧面的气囊中回缩5个舵囊;而在基本气囊中回缩4个舵囊。压平的气囊被折叠成“S”形,从而实现织物腿向内折叠的封装。图21表示具有包装外皮的封装气囊。

图21 “火星探路者”包装的气囊Fig.21 MPF packed airbag
气囊系统的试验验证表明,它能够成功地缓冲在火星岩石表面的着陆冲击,保护“火星探路者”着陆器。试验包括设计验证试验、全尺寸研制与鉴定试验和冲击与降落试验。在火星环境压力和地球环境温度下进行了12次下降试验。该气囊系统还进行了部件级岩石冲击试验和系统级岩石降落试验。
4.2.2 美国“火星探测巡视器”的着陆缓冲系统
美国的勇气号、机遇号“火星探测巡视器”于2003年6月发射,并在火星成功着陆。“火星探测巡视器”采用气囊着陆缓冲系统,该系统也由NASA 的喷气推进实验室(JPL)负责设计,由ILC公司负责研制[18]。“火星探测巡视器”气囊系统的基本型设计类似于“火星探路者”,气囊在几何形状上与后者任务所使用的系统一样,但已得到增强,以适应“火星探测巡视器”着陆器质量的增加(从290kg增至415kg,大于40%);包括气囊在内的“火星探测巡视器”总着陆质量为540kg[19]。着陆器带有4个气囊,每个气囊都由6个直径1.8m 的舵囊组成(总共24个),各个气囊连接到四面体形着陆器的各面舱瓣上,利用筋腱维持其形状,如图22所示。

图22 “火星探测巡视器”的气囊缓冲系统Fig.22 MER packed airbag
1)气体发生器
“火星探测巡视器”的气体发生器是“火星探路者”气体发生器的改进型,装在一个双锥形钛合金壳体内。主火药柱可高速率燃烧1.8s,用于充气;维持药柱以较低速率燃烧20s,用于着陆期间的气体补足。“火星探测巡视器”的设计增加了药柱质量,以提高该气体发生器的总输出;同时设计了新的药柱几何形状,以改变燃烧速率和产生所期望的质量流分布曲线。“火星探路者”的气体发生器壳体壁厚逐渐变小并有复杂的过渡;而“火星探测巡视器”的气体发生器壳体厚度不变,从而显著降低了制造加工的复杂性,提高了安全系数。2种气体发生器设计的横截面如图23所示。由图可见,两者设计基本相同,只是“火星探测巡视器”的主火药柱(图中中间偏左处)有所改进。

图23 “火星探路者”和“火星探测巡视器”气囊气体发生器的横截面比较Fig.23 Comparison between MPF and MER gas generator cross sections
2)气囊组件
“火星探测巡视器”的气囊在“火星探路者”的基础上进行了一些改进,重要改进集中在增强气囊的坚固性上。与“火星探路者”相比,“火星探测巡视器”的静态气囊/着陆器接触力更大,因而需要额外的增强,特别是要另加刺破与侵蚀防护。“火星探测巡视器”的构型中引入了气体容纳约束层,以提供内部囊胆层的冗余。为了限制约束接缝的损伤,向易受岩石损坏的接缝中加入防刺破织物(由高旦尼尔织物制成)。这种方法不仅能限制接缝线失效,也能中断约束材料中的撕裂传播。
“火星探测巡视器”的气体保持囊胆层和承载约束层都采用了在“火星探路者”任务期间所研制的维克特兰-HS织物和低温硅酮橡胶涂层材料。由于纱线加工和编织方面获得了最新发展,所制成的材料抗拉强度比“火星探路者”的提高20%。磨损层材料采用质量更小的新型防破裂磨损织物,比”火星探路者”的质量降低近30%;选择6层来提供更高的性能,从而获得最小的质量冲击。与“火星探路者”一样,“火星探测巡视器”的气囊主要接缝也是一种宽1.6cm 的咬口折缝,通过4行200旦尼尔3层维克特兰线来连接;采用了一种更加坚固的密封方法,以补充这种带缠工艺。对于较复杂的接缝区域,ILC公司制造了一种新型硅酮薄膜,它允许原位固化,并提供了极好的抗拉强度和高延伸率,从而使”火星探测巡视器”气囊组件的系统泄漏水平比”火星探路者”飞行系统的降低了35%。
“火星探测巡视器”的气囊系统级试验共进行了33次全尺寸冲击试验,还进行了气体发生器充气试验、气囊回缩与展开试验和52次降落试验[19]。
4.2.3 欧洲“火星生物学”着陆器的着陆缓冲系统
欧洲“火星生物学”探测器预定于2016-2018年发射。2005年,英国提出了一种可用于“火星生物学”有效载荷在火星表面上着陆的排气气囊设计。该气囊系统使用一种近实时系统,这种系统利用激光测距仪确定从气囊排气的正确时间[20]。
气囊的布局是分区的有六个侧面的圆环,符合呈六边形着陆器平台的几何形状,其对边宽度约为1.8m。该圆环具有一个椭圆形的截面,其设计目的是改进该系统的高宽比,从而提供对横向速度的稳定性,同时保持大的足迹面积。着陆器平台定位在圆环的中心空腔内,其底面位于气囊底部上方0.95m 处,是有效撞击极限与改进的横向刚度和侧面防护之间的折衷方案。为了保持椭圆形/双泡形的截面,要采用在功能上类似于网状面板的内部结构,这种结构存在于“圆环”的所有6 个侧面之中。一种称为缓冲气囊的辅助气囊(见图24)装在主气囊的中心空腔内,并连接到巡视器平台的底部。它具有3种功能:①增强对地面最终冲击振动的防护;②增大着陆器平台横向反作用区;③在气囊缩回期间提供地面排障的平台。该缓冲气囊可充气到25kPa的绝对压力,并在气囊回缩后放气。

图24 “火星生物学”缓冲气囊通用构型Fig.24 General configuration of ExoMars bumper airbag
气囊由涂敷硅树脂的维克特兰织物制成。该织物的强度为73kN/m,在涂敷前的单位面积质量约为120g/m2。在该织物的每边上需要60g/m2的硅树脂,以保证材料不透气。涂敷硅树脂的维克特兰在“火星生物学”任务所预期的低温环境下具有极好的强度和高模量。
2005年中期,“火星生物学”进行了排空气囊设计概念论证的验证试验。该试验是一项地球环境冲击试验,同时也是对LS-DYNA 模型的校验。试验气囊由涂敷聚氨酯的凯夫拉织物制成,并采用分瓣的排气阀设计。试验气囊的总体布置如图25所示。一个形状类似于”火星生物学”着陆器的有效载荷模拟器由焊接的钢材制造,近似表征该着陆器400kg的质量。

图25 “火星生物学”着陆器试验气囊的总体布置Fig.25 General arrangement of ExoMars test airbags
4.2.4 欧洲“贝皮-哥伦布”水星探测器的着陆缓冲系统
欧洲的“贝皮-哥伦布”水星探测任务目前预计于2015年发射。在2005年为其开展的气囊着陆系统研究中,确定了一种双圆环形气囊作为小型着陆器着陆系统球形气囊的备选方案。该着陆器由一个化学推进舱送至邻近水星表面,然后着陆器和气囊在规定高度通过气囊的快速膨胀从推进舱弹出。在第一次冲击时,可能出现较大的横向速度[20]。
1)系统组成
在一项平行研究中曾同时考虑了双圆环布局和球形系统。虽然双圆环的质量有效性低于球形,但它具有下列优点:①在着陆过程结束时的最终方位几乎与有效载荷呈平行状态,从而能大大降低在气囊脱离期间释放有效载荷的潜在可能性,而没有优选静止姿态的球形系统很可能出现这种情况;②在气囊组装后可以接近着陆器,这简化了有效载荷力学界面的调节,允许在晚些时候接近着陆器,以便安装敏感元件;③使将着陆器组装到推进舱后再安装气囊成为可能;④与球形系统相比,在冲击期间可能提供更高的阻尼。
所设计的双圆环气囊达到在质量估算内可能最大的尺寸,因而能获得最佳性能。该气囊的囊胆可能由编织200 旦尼尔维克特兰织物制成,并利用在“火星探路者”和“火星探测巡视器”气囊上使用的类似技术构建。各段由许多有图案的零件组成,这些零件用缝制的接缝连接在一起;然后将接缝密封,防止充气气体逸出。气囊的外边利用2层具有防破裂编织图案、更轻质的100 旦尼尔维克特兰织物覆盖,用于防护气囊囊胆,以免被岩石刺破和磨损。两层被认为是绝对最小防护,如果质量允许可以再加一层。有效载荷被收集在2 个圆环夹层中间所形成的空间中,如图26 所示。气体发生器的调节是在有效载荷与气囊之间所剩余的狭小空间中提供的。

图26 “贝皮-哥伦布”的双圆环气囊系统Fig.26 Double torus airbag system of Bepi-Colombo
为了满足在着陆过程结束时气囊脱离的要求,每个圆环被横跨直径(across a diameter)分成两半,然后通过荷兰式接头连接在一起。荷兰式接头的终端提供从着陆器到气囊的连接,从而防止着陆器在中心孔腔内转动。上下2个圆环在其主直径上连接在一起,在脱离时它们各自的一半一起离开着陆器横向移动,如图27中的LS-DYNA 模型所示。

图27 表示双圆环气囊脱离的LS-DYNA 模型Fig.27 LS-DYNA model showing jettison of a double torus system
2)冲击试验
2个试验气囊的构型为近似于圆环的八边形,大小直径分别为1.25m 和0.75m。该气囊的气体保持囊胆由一种涂敷聚氨酯的聚酯织物——埃尔特克斯(Aertex)制成。图28表示充气状态的气囊囊胆。为防护囊胆材料免受处理与磨蚀损伤,圆环的大多数外表面用编织凯夫拉材料覆盖。所设计的覆盖在埃尔特克斯上的凯夫拉的充满度,保证压力载荷仅仅被囊胆所获取。

图28 充气的气囊囊胆Fig.28 Inflated airbag bladder
有效载荷模拟器的基本结构由压制与焊接的铝合金管制成,顶部和底部用铝合金板封闭形成一个密闭圆筒,采用一种流线型板材环绕铝合金管构成外部几何形状,如图29所示。在每根管子的顶部和底部安置4块铝合金片,彼此直接相对,形成与气囊的接口。

图29 有效载荷模拟器Fig.29 Payload simulator
在试验期间,有效载荷的重心发生了偏移,在冲击期间有效载荷至地面的最小间距低至0.16 m。高速图像(见图30)表明,即时的峰值撞击符合所计算的最小间距。

图30 在试验过程中有效载荷至地面的最小间距的高速图像Fig.30 High speed images at the time of minimum payload clearance during test
5 空中悬吊机的组成和应用
空中悬吊机又称为天空起重机,是一种新型下降与着陆装置。它采用全新的技术,用于探测器在行星表面着陆。美国“火星科学实验室”的火星表面巡视器好奇心号(Curiosity)的着陆首次采用了这种新型装置[21]。
5.1 空中悬吊机的组成和工作过程
“火星科学实验室”所采用的触地(Touchdown)技术是进入、下降与着陆(EDL)体系结构最为创新的部分。该项技术称为“空中悬吊机机动”。整个空中悬吊机系统由下降级、牵引缆绳和电缆以及推进、制导、导航与控制系统等组成。空中悬吊机的工作过程包括:从缓慢下降的下降级上降下系在3根牵引缆绳上的着陆器,直到缆绳完全展开达到7.5m 的长度。着陆器以0.75m/s的不变速度持续垂直下降,直到通过缆绳持续卸载而探测到巡视器触地为止。
空中悬吊机的体系结构表现出优于传统着陆方法(上述气囊和软着陆着陆器)的特点。它无需气囊、吸振结构(或吸振着陆腿)及出舱系统;但需要推进系统和制导、导航与控制系统[22],使发动机和推进器保持离开行星表面,从而降低表面相互作用(如灰尘挖掘和开沟),同时在着陆动作期间实现闭环控制。牵引缆绳消除着陆动作以及来自下降级控制器的相关干扰的影响。此外,与许多传统的触地传感器不同,在牵引缆绳发生卸载后呈现持续的触地信号。
由于触地时持续的绳系状态,以及触地速度很低,因此空中悬吊机系统比其他着陆系统具有更大的触地稳定性,并经受更小的冲击载荷。高稳定性和低加载(相当于巡视器冲击载荷)意味着,不再需要独立的触地系统,而且可以取消“出舱”步骤。更确切地说,专门为表面相互作用而设计的巡视器摇杆转动悬挂机构就是触地系统,它处于适当位置以便着陆后立即开始操作。此任务步骤如图31所示。

图31 空中悬吊机工作阶段Fig.31 SkyCran operating phase
5.2 空中悬吊机的着陆机理
当下降级沿着不变速度参考轨迹运动时,预定垂直推力等于该系统所受的重力。着陆前,预定垂直推力将等于重力加速度与下降级和巡视器综合质量的乘积。着陆后,巡视器的质量由表面支撑,缆绳卸载,所预定的垂直推力将降低约1/2。推力在着陆后持续降低,其原因是垂直下降参考轨迹不变,保证牵引缆绳持续卸载。着陆算法利用这种固有的卸载,通过依靠预定垂直推力感知着陆动作。一旦实现,着陆机理监控预定垂直推力达到一个持续值,该值与下降级所受重力一致。
5.3 空中悬吊机的应用实例
主要介绍美国“火星科学实验室”的好奇心号巡视器的着陆缓冲系统[21]。2012年8月6日,“火星科学实验室”携带的好奇心号巡视器成功在火星表面着陆,实现了使质量为900kg的有效载荷在火星着陆,这是迄今为止人类送上火星的最大质量的巡视器。
5.3.1 “火星科学实验室”的构型
“火星科学实验室”由巡航级、下降级、表面巡视器、进入气动外壳(隔热罩和后壳)组成。进入气动外壳的直径为4.5m,高为3.6m。“火星科学实验室”的发射状态构型和巡航状态构型如图32所示。
“火星科学实验室”的好奇心号巡视器在火星上的着陆质量较大,NASA 在继承“海盗”系列软着陆技术的基础上设计了一个新的进入、下降与着陆系统。“火星科学实验室”是首个采用精确着陆技术进行软着陆的探测器,同时它还具有在整个进入、下降与着陆过程中接收信息的能力。好奇心号的着陆精度范围直径能达到20km,而其他探测器的着陆精度范围直径都为数百千米。

图32 “火星科学实验室”的发射状态和巡航状态构型Fig.32 MSL launch configuration and cruise configuration
5.3.2 “火星科学实验室”的下降与着陆过程
“火星科学实验室”的整个进入、下降与着陆过程包括火星大气层外调整、受控进入火星大气层、超声速降落伞展开下降、动力制动下降和空中悬吊机下降5个阶段。其中降落伞展开后的下降与着陆过程示意图如图33所示。

图33 “火星科学实验室”下降和着陆过程示意图Fig.33 MSL descent and landing sequence
“火星科学实验室”在制动下降和空中悬吊机最终下降阶段,采用了全新的空中悬吊机技术。当降落伞使探测器减速、隔热罩分离之后,下降级从后壳分离;下降级利用8台可控发动机使探测器进一步减速,随后将工作发动机数量减少至4台;当探测器速度减为0 时,好奇心号从下降级中释放出来,并“吊”在下降级下方7.5 m 处;好奇心号着陆时,下降级悬浮在好奇心号上方,在确定好奇心号着陆并等待2s之后,爆炸装置起爆驱动切割器切断缆绳和电缆,下降级随后飞离并坠落在其他地方,至此完成着陆。空中悬吊机释放好奇心号直至其着陆的构想过程如图34所示[23]。

图34 “火星科学实验室”进入、下降和着陆过程Fig.34 MSL entry,descent and landing sequence
5.3.3 空中悬吊机系统的构型
空中悬吊机系统包括3根降低巡视器的脐状牵引带(BUD),以及1根在下降级和巡视器之间传输电信号的脐状电缆。利用3根“脐状牵引带”,巡视器从下降级降至火星表面,此时牵引带完全展开(长7.5m)。在整个过程中,垂直下降速度保持为0.75m/s。触地着陆技术利用了巡视器移动系统适应地面并吸收接触负载的能力。当探测到巡视器接触地面时,牵引带被切断,下降级执行飞离机动。空中悬吊机的巡视器分离构型和下降级构型如图35所示。

图35 空中悬吊机的巡视器分离构型和下降级构型Fig.35 SkyCran rover separation configuration and descent stage configuration
6 结束语
统观上述3类深空探测器着陆缓冲系统,各有特点,应用范围也有所区别。其中,软着陆机构相对较为典型、传统,应用较广,如美国“勘测者”、“阿波罗”、“海盗”等月球或火星的无人或载人着陆器,以及小行星着陆器,可用于需要返回的着陆器;气囊缓冲装置相对较轻,包装体积小,适用于复杂或未知地形等特定条件下的着陆,如美国“火星探路者”、“火星探测巡视器”、欧洲“火星生物学”等火星着陆器,以及欧洲“贝皮-哥伦布”水星探测器;而空中悬吊机则别具一格,冲击最小,安全可靠,可用于各种新型行星着陆器,尤其是表面巡视器的着陆,如“火星科学实验室”的好奇心号巡视器。
随着21世纪深空探测活动的拓展与深入,各种深空探测器着陆缓冲系统也将根据任务需求而不断得到改进,并将探索研发各种新型着陆缓冲系统;与此同时,这些系统将会在各国未来的月球、火星、金星和小行星等深空探测中获得更为有效的实际应用。
(References)
[1]于登云,杨建中.航天器机构技术[M].北京:中国科学技术出版社,2011
Yu Dengyun,Yang Jianzhong.Spacecraft mechanism technology[M].Beijing:China Science and Technology Press,2011(in Chinese)
[2]刘志全,黄传平.月球探测器软着陆机构发展综述[J].中国空间科学技术,2006,26(1):33-39
Liu Zhiquan,Huang Chuanping.Progress summary of lunar explorer soft-landing mechanism[J].Chinese Science and Technology,2006,26(1):33-39(in Chinese)
[3]朱仁璋,王鸿芳,泉浩芳,等.美国火星表面探测使命评述(下)[J].航天器工程,2010,19(3):7-27
Zhu Renzhang,Wang Hongfang,Quan Haofang,et al.Overview of the US Mars surface missions(part two)[J].Spacecraft Engineering,2010,19(3):7-27(in Chinese)
[4]杨建中,曾福明,张熇.月球探测器软着陆机构综述[C]//中国宇航学会深空探测技术专业委员会第一届学术会议录.北京:中国宇航学会,2005:135-139
Yang Jianzhong,Zeng fuming,Zhang He.Summary of lunar explorer soft-landing mechanism[C]//Proceedings of the First Academic Conference of Chinese Society of Astronautics Deep-space Exploration Tehchology Specialty Council.Beijing:Chinese Society of Astronautics,2005:135-139(in Chinese)
[5]褚桂柏,张熇.月球探测器技术[M].北京:中国科学技术出版社,2007:177-214
Chu Guibai,Zhang He.Lunar explorer technology[M].Beijing:China Science and Technology Press,2007:177-214(in Chinese)
[6]陈金宝,聂宏,柏合民,等.月球探测器软着陆缓冲机构发展综述[C]//中国宇航学会深空探测技术专业委员会第三届学术会议论文集.北京:中国宇航学会,2006:56-60
Chen Jinbao,Nie Hong,Bai Hemin,et al.Progress summary of lunar explorer soft-landing impact attenuation mechanism[C]//Proceedings of The Third Academic Conference of Chinese Society of Astronautics Deep-space Exploration Technology Specialty Council.Beijing:Chinese Society of Astronautics,2006:56-60(in Chinese)
[7]曾福明,杨建中,娄汉文.月球及行星探测器软着陆机构缓冲器技术综述[C]//中国宇航学会深空探测技术专业委员会第一届学术会议论文集.北京:中国宇航学会,2005:145-148
Zeng fuming,Yang Jianzhong,Lou Hanwen.Summary of lunar and planets explorer soft-landing mechanism impact attenuater technology[C]//Proceedings of the First Academic Conference of Chinese Society of Astronautics Deep-space Exploration Technology Specialty Council.Beijing:Chinese Society of Astronautics,2005:145-148(in Chinese)
[8]Sperling F B.Design and analysis of the Surveyor landing shock attenuation system,Paper 69-DE-46,A69-28848[R].New York:ASME,1969
[9]NASA.Landing impact attenuation for non-surface-planing landers(NASA space vehicle design criteria(structures)),NASA-SP-8046[R].Washington:NASA,1970
[10]Rogers W F.Apollo experience report-lunar module landing gear subsystem,NASA-TN-D-6850[R].Washington:NASA,1972
[11]ВиноградовА П.ПередвижнаялабораториянаЛуне Луноход-1[M].Москва:Издательство,1971 Vinogradov A P.Motive laboratory on Moon-Lunar Rover-1[M].Moscow:Science Press,1971(in Russian)
[12]NASA.NASA’s new lander prototype skates through integration and testing[R/OL].[2011-09-30].http://www.nasa.gov/mission _pages/lunarquest/robotic/11-13.html
[13]NASA.NASA’s robotic lander performs second freeflight test[R/OL].[2011-09-30].http://www.nasa.gov/mission_pages/lunarquest/robotic/hover_test_4.html
[14]Hart J J,Mitchell J D.Morpheus lander testing campaign[R].New York:IEEE,2011
[15]Holmberg N A,Faust R P,Holt H M.Viking’75 spacecraft design and test summary,Volume I lander design,NASA RP-1027[R].Washington:NASA,1980
[16]Willey C E,Sandy C,Welch J,et al.Impact attenuating airbags for Earth and planetary landing systems,AIAA 2007-6172[R].Washington:AIAA,2007
[17]Sandy C R.Development of the Mars Pathfinder airbag subsystem,AIAA 1997-1545[R].Washington:AIAA,1997
[18]Stein J,Sandy C.Recent developments in inflatable airbag impact attenuation systems for Mars exploration,AIAA 2003-1990[R].Washington:AIAA,2003
[19]Adams D S.Mars Exploration Rover airbag landing loads testing and analysis,AIAA 2004-1795[R].Washington:AIAA,2004
[20]Bown N W,Darley M G.Advanced airbag landing systems for planetary landers,AIAA 2005-1615[R].Washington:AIAA,2005
[21]Adam S,Devin K,Chen A,et al.Mars Science Laboratory entry,descent,and landing system[R].New York:IEEE,2006
[22]Martin M S.The MSL SkyCran landing architecturea GN&C Perspective[C]//Proceedings of the 7th Annual International Planetary Probe Workshop(IPPW-7)Conference.Barcelona,Spain:IPPW,2010
[23]贺鹏梓.空中吊车——美国“好奇”号火星车悬浮降落揭密[J].太空探索,2011(11):36-39
He Pengzi.SkyCran-US Curiosity martian rover suspending descent secret revealed[J].Space Exploration,2011(11):36-39(in Chinese)
