航天器电源系统的动态特性研究
2012-12-29韩大鹏税海涛曾国强王炎娟
韩大鹏 税海涛 曾国强 王炎娟
(1 国防科技大学航天科学与工程学院,长沙 410073)
(2 国防科技大学信息系统与管理学院,长沙 410073)
(3 北京航天飞行控制中心,北京 100083)
1 引言
对航天器来说,电源系统的性能是电子系统稳定工作的基础和前提。随着技术的发展,锂离子电池逐渐成为应用研究的主流方向[1]。当前的研究者主要关注以下两方面的问题:太阳电池阵与蓄电池组的充放电管理[2],以及二次电源的精度与可靠性[3-4]。这两方面是直接关系到电源系统能否长期稳定工作的关键因素,而本文主要关注另外一个容易被忽视的问题——航天器电源系统的动态特性。
所谓电源的动态特性,是指用电状态改变时电流或电压的瞬时动态变化特性。尽管瞬变过程的持续时间很短,只有十几微秒到几毫秒,但对电源系统的潜在危害是不能忽视的。不适当的设计会诱发较大的尖峰电流、电压突降以及反向电压,其持续时间和幅度可能会达到电子系统的敏感门限,从而造成部件故障;航天器电源系统工作在真空、辐照环境下,而任何突发的状况都可能引起不可预知的连锁反应,导致灾难性的后果;更为严重的是,动态特性会随辐射剂量累积、元器件老化等因素发生难以预测的变化,成为电源系统的长期工作的隐患。要从根本上消除上述问题,必须对航天器电源系统的动态特性进行专门的原理分析与工程设计。实际上,凡是对安全性要求高的用电场合,均对电源动态特性提出了要求[5-6]。对于航天器电源系统,有研究者对二次电源的动态特性进行了研究[7],但没有涉及电源系统的全局特性。本文针对电池通过不经调节的母线给部件供电的电源系统,从理论和技术两方面对供电部件(电池)和用电部件的动态特性进行了分析,针对容易出现的动态特性异常问题,提出了解决方案。
2 电池动态特性分析
随着电源技术的发展,锂离子电池正逐渐成为电池主流选择。一般认为,锂离子电池与镍氢电池相比,瞬间释放电流的能力不足,这是由锂离子电池内阻特性引起的。以某型锂离子电池为例,在启动某用电部件时,实测得到图1所示的电压波形。
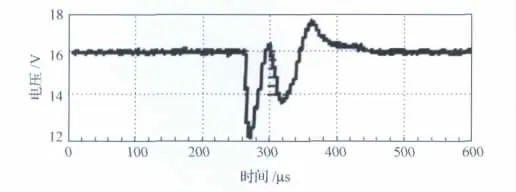
图1 用电部件启动瞬间的电压波动Fig.1 Voltage ripple at start-up of power-consuming unit
由图1可知,电压下降达4V 之多,这是由用电部件的瞬时电流和电池内阻引起的。设电池内阻为RB,当前输出电压为Unom,电源系统能够工作的最低输出电压为Ulow,则母线上能够提供的瞬时电流为

当用电部件的启动电流超过后,电池电压将下降到不能接受的程度。压降值ΔU=Unom-Ulow=ⅠpmaxRB,就对应了瞬时动态特性。只要启动电流得到限制,那么动态特性就不足以造成损害。不过,实际上情况可能更坏,其原因在于:锂离子电池的内阻是动态的,随输出电流频率的增加而增大,因此在电流突然增大的瞬间可能形成一个恶性正反馈,导致ΔU的幅度超出预期。选用内阻小且稳定的电池,可以缓解恶劣的动态特性。考虑到电池老化导致的电池内阻特性变化,在设计时应预留足够的裕量。
如前所述,用电部件的瞬间启动电流如果太大,将对母线电压的动态特性造成不良影响。一般而言,瞬间启动电流是由于部件内部的容性负载造成的。图2虚框中为用电部件等效电路。启动瞬间,滤波电容C接近短路,会产生Ⅰp=Ubus/RES的瞬态电流,其中RES为C的等效串联内阻(ESR),Ubus为母线电压。用电部件的内部电路为了获取足够的电源稳定度,往往会使用大容量的电容,相应地,其ESR 取值较小,往往在0.8Ω 以下。以12V 供电为例,0.5Ω 的ESR 会导致24A 的瞬态电流,即使扣除计算偏差和各种电路损耗,仍然是相当可观的。因此,在进行部件的电源设计时,其输入端应尽可能选用高ESR 的电容。但是,ESR 过大,又会导致稳态工作时电容的滤波效果减弱,因此必须在瞬态特性和稳态特性间取得平衡。
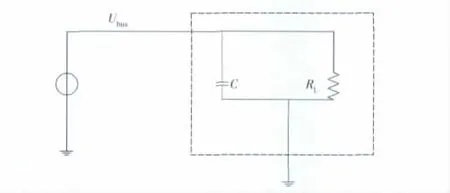
图2 用电部件等效电路Fig.2 Equivalent circuit of a power-consuming unit
图3为锂离子电池与用电部件等效电路。其中:由理想电源UB和串联内阻RB模拟电池,用电部件内的滤波电容由理想电容C和等效内阻RES串联替代,用电部件的等效内阻由可调电阻RL模拟。
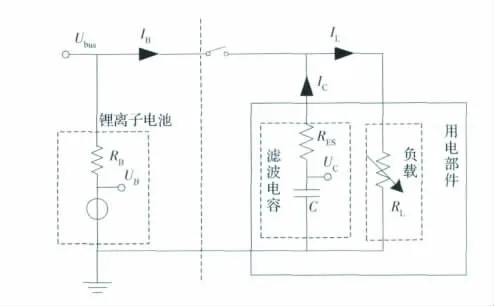
图3 锂离子电池与用电部件等效电路Fig.3 Equivalent circuit for lithium-ion battery and power-consuming unit
根据基尔霍夫定律[8]可得

式中:ⅠB为母线电流;Ubus为母线电压。

式中:ⅠC为容性负载电流;ⅠL为阻性负载电流。

式中:UC为理想电容C上的分压。

式中:t为变化时间。
用拉普拉斯算子s替代,以Ubus为未知量,解方程得到
根据拉普拉斯算子的性质,当s→∞时得到启动瞬时的Ubus值[9],即
可见,电池内阻RB与用电部件的等效内阻RL的匹配关系是决定母线上瞬时压降的主要因素,RB/RES与RB/RL越小越好。一般而言,电 池内阻RB从电池厂商得到,等效内阻RL可由用电部件的稳态电流Ⅰstable推算得到(见式(8)),电容等效内阻RES可由用电部件内部滤波电容的选型直接得到,也可由瞬态峰值电流Ⅰpeak推算得到(见式(9))。实际工程设计中,3个等效电阻的取值受制于多种因素,因而使得电源的综合分析与优化变得困难。
式中:Usupply为供电电压。

3 动态特性的建模分析
有研究表明,电源系统的动态特性可通过特殊器件加以改善[10],但是这种技术在航天应用还有一定距离。为使电源动态特性处于可控范围,通常要对用电策略提出要求。本节将在前文单一用电部件分析结果的基础上,针对带有多个用电部件的电源系统进行综合动态特性分析,建立一种仿真模型来辅助工程设计,为用电分配提供直观的参考依据。
如图4所示,第i个用电部件的电流由ⅠiL-ⅠiC表示,第1项对应的是稳态电流,第2项对应的是瞬态电流。整个电源系统划分为两部分:虚线左侧为供电单元,其传递函数以ⅠB为输入,Ubus为输出;虚线右侧为用电部件,传递函数以Ubus为输入,以全部用电部件的电流总和ⅠB为输出。整个系统的建模,就是以这两类传递函数相互作用实现的。
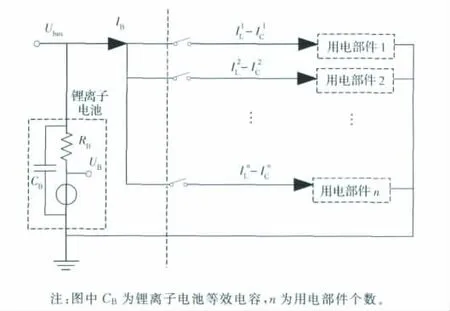
图4 多个用电部件情况下的电源网络建模Fig.4 Modeling of power network for multiple power-consuming units
首先给出用电部件的开关标志量Ki,其定义为:当用电部件i未接入供电时,取值为0;当用电部件i接入供电时,取值为1。
供电单元的传递函数为

用电部件i的传递函数推导如下。
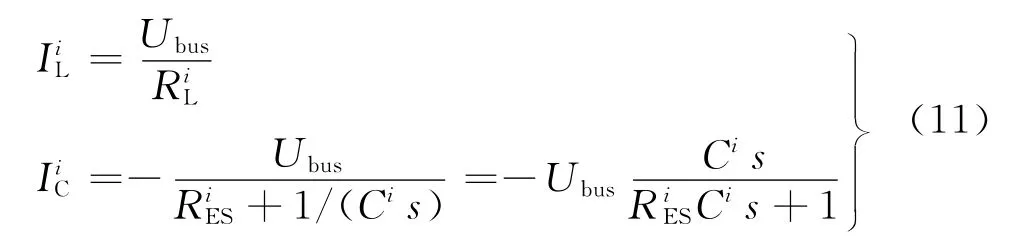
式中:和Ci分别为第i个用电部件的等效内阻和内部滤波电容。
式中:为第i个用电部件的等效内阻。
使用双线性变换法进行离散化。设系统采样周期为T,差分算子记为z,把带入式(12)得
在系统运行过程中,开关状态会出现多种状态,即集合K={K1,K2,…,Kn}是时变的。
电源系统动态特性的离散仿真步骤如下。按照迭代次数j=1,2,…,n循环仿真:①读取当前状态Ubus(j),ⅠiL(j),ⅠiC(j),ⅠB(j);②更新部件开关状态集合K(j);③当前状态Ubus(j)代入式(13),更新ⅠB(j+1);④ⅠB(j+1)代入式(10),更新Ubus(j+1);⑤j+1→j,跳转至下一个循环。该循环步骤可以基于Matlab软件的Simulink工具箱实现。为了确保能及时反映系统内部件开关引起的动态特性变化,要求离散化周期小于星载计算机控制周期。
4 范例
设电池内阻为0.06Ω,电池电压为12V,假设电源系统是从所有电源开关关闭的状态开始运行的,那么初始状态Ubus(0)=12V,ⅠB(0)=0A。假设有4个用电部件,其参数列于表1。
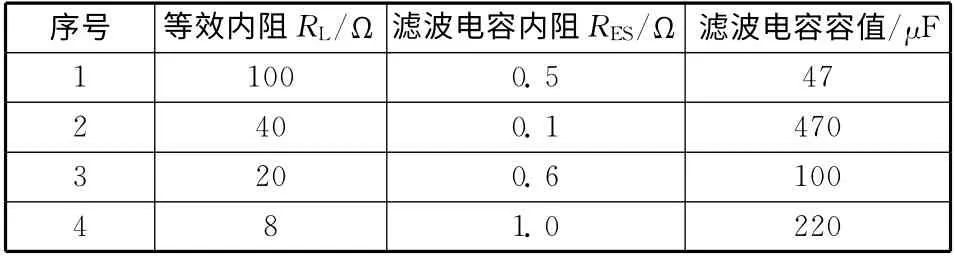
表1 用电部件内阻参数Table 1 Inner resistance parameters of power-consuming units
设星载计算机管理系统的控制周期为100ms,按照1~4的顺序依次打开全部设备,开启时间点分别位于0.5s、0.6s、2.0s和2.1s。在Simulink软件下进行仿真,得到母线电压变化曲线如图5所示。仿真结果表明:第2个用电部件虽然稳态电流小,但是瞬态电流很大,因而引起的母线电压波动最大,降到了9V,因此,应在该部件启动后延时更长再启动其他用电部件,另外,这种幅度的电压波动难以承受,容易触发低压保护等内部机制,应考虑使用瞬时限流措施;第3、4个用电部件虽然稳态电流很大,但同时启动是没有问题的。
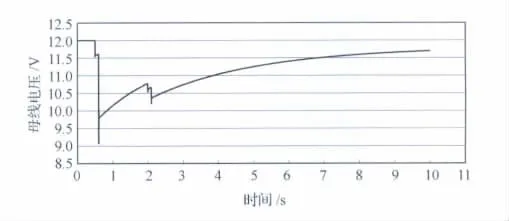
图5 4个用电部件启动时母线电压动态变化Fig.5 Dynamic variation curve of bus voltage at 4power-consuming units start-up
5 结束语
本文从阻抗匹配原理出发,借助传递函数对电源系统的动态特性问题进行了探讨,给出了离散化的仿真分析模型。本文的分析虽然是针对不经二次调节的母线电压的,但是对具有二次电源做电压调节的电源系统也具有借鉴意义。在后续研究中,将把太阳电池阵供电融合进去,以得到更加完整、实用的仿真结果。
(References)
[1]王东,李国欣,潘延林.锂离子电池技术在航天领域的应用[J].上海航天,2000,17(1):54-58
Wang Dong,Li Guoxin,Pan Yanlin.The technology of lithium-ion batteries for spacecraft application[J].Aerospace Shanghai,2000,17(1):54-58(in Chinese)
[2]练敏英,孙宁,李祖布,等.一种基于S4R 技术的微小卫星电源控制器设计[J].电源技术,2009,33(6):482-485
Lian Minying,Sun Ning,Li Zubu,et al.A power controller design of micro-satellite based on S4Rtechnology[J].Chinese Journal of Power Sources,2009,33(6):482-485(in Chinese)
[3]龚欣.航空航天用DC/DC 电源模块结构分析研究[J].电子产品可靠性与环境试验,2010,28(5):23-28
Gong Xin.Structural analysis of DC/DC power modules for aerospace applications[J].Electronic Product Reliability and Environmental Testing,2010,28(5):23-28(in Chinese)
[4]Warren K,Roth D,Kinnison J,et al.Single event testing of DC/DC converters for space flight[C]//Radiation Effects Data Workshop,2002IEEE.New York:IEEE,2002:106-108
[5]鲁丁,杨启明.相控阵雷达电源动态特性的改善[C]//第13届全国电源技术年会会议论文集.天津:中国电源学会,1999:298-300
Lu Ding,Yang Qiming.On the improvement of the dynamic behavior of radar’s power[C]//Proceedings of the 13rd National Annual Conference on Power Technology.Tianjin:China Power Supply Society,1999:298-300(in Chinese)
[6]王媛彬.矿用本安电源的动态特性分析[J].煤矿机械,2011,32(8):92-94
Wang Yuanbin.Dynamic behavior of mine intrinsic safe power supply[J].Coal Mine Machinery,2011,32(8):92-94(in Chinese)
[7]刘咏晖,李旭评,崔恒巍.开关电源动态特性的研究[C]//第9届中国宇航学会空间能源技术年会会议论文集.北京:中国宇航学会,2005:140-142
Liu Yonghui,Li Xuping,Cui Hengwei.Research on the dynamic behavior of switching power[C]//Proceedings of the 9thCSA Conference on Space Energy Technology.Beijing:CSA,2005:140-142(in Chinese)
[8]胡钋,樊亚东.电路原理[M].北京:高等教育出版社,2011
Hu Po,Fan Yadong.Circuit theory[M].Beijing:High Education Press,2011(in Chinese)
[9]胡寿松.自动控制原理[M].5 版.北京:科学出版社,2007
Hu Shousong.Automatic control theory[M].5th ed.Beijing:Science Press,2007(in Chinese)
[10]潘艳,宁武,陈永真.超级电容器改善电源动态特性[C]//第17届全国电源技术年会会议论文集.天津:中国电源学会,2007:378-381
Pan Yan,Ning Wu,Chen Yongzhen.Using super capacitors to enhance the dynamic behavior of power source[C]//Proceedings of the 17th National Annual Conference on Power Technology.Tianjin:China Power Supply Society,2007:378-381(in Chinese)