UCD 数码航摄仪的特点与应用*
2012-12-23马春丽杨红艳
马春丽,杨红艳
(四川省地质测绘院,四川 成都 610017)
UCD 数码航摄仪的特点与应用*
马春丽,杨红艳
(四川省地质测绘院,四川 成都 610017)
介绍了UCD数码航摄仪的特点,以某城市0.2 m地面分辨率航摄影像资料为例,探讨了数字正射影像图(DOM,Digital Orthography Map)的成图精度与像元大小之间的关系,并得出了一些有益的结论。
UCD;数字正射影像(DOM);像元;精度
0 引言
目前,国内外主要的大面阵数码航空相机有瑞士Leica公司的ADS40、奥地利 Vexcel Imaging公司推出的 UltraCAM D(UCD)、美国Z/I Imaging公司推出的DMC以及2006年四维远见公司推出的SWDC。其中ADS40为线阵相机,是严格的中心投影,但飞行条件要求较高、覆盖范围小、后续处理复杂。其余3 款为面阵相机,影像质量好、平面精度高[1,2]。
数码航摄相机在影像质量、色彩、分辨率等方面均优于传统胶片相机,同时对天气条件要求较低,消除了胶片处理所带来的几何精度损失(如影像压平、影像扫描、胶片质量等),实现了全数字航空摄影测量。然而,由于目前生产大面阵的CCD还有一定难度,数码航摄影像覆盖范围小、基高比小,高程精度低[3]。
为此,本文以某地区高分辨率UCD数码航摄资料为例,介绍了UCD数码航摄仪特点,并对成图精度进行了详细的分析。
1 UCD数码航摄仪
UCD数码航摄仪由4个黑白影像的全色波段(Pan)镜头,并沿航向方向等间隔排列(间隔约8 cm),3个彩色镜头(即RGB镜头)和1个近红外镜头(Near InfraRed,NIR)位于其两侧(见图1)。UCD相机全色镜头焦距f约为100 mm,像素大小分别为7 500×11 500 pixel(即67.5 mm ×103.5 mm,传统胶片相机像幅大小为230 mm×230 mm),物理分辨率为9 μm。
4个全色镜头共有9个CCD面阵,每个镜头承载的CCD个数不同,中心1个,4角上各1个,前后各1个,左右各1个,CCD分布及成图过程,见图2。

图1 UCD镜头示意图Fig.1 UCD camera lens schematic
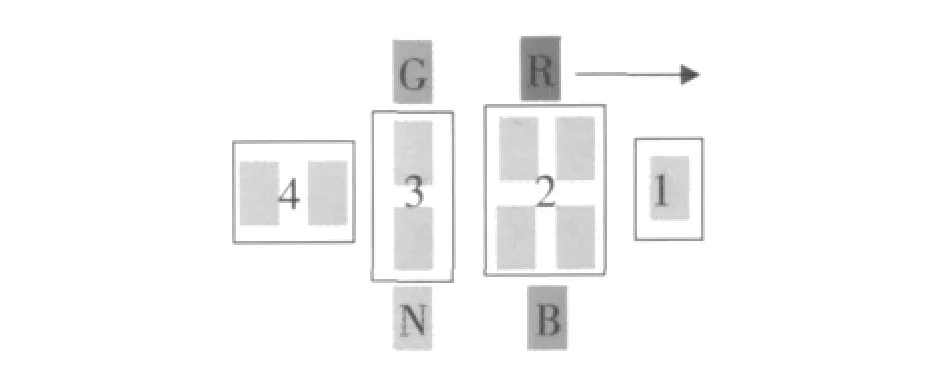
图2 UCD成像过程示意图Fig.2 UCD imaging process schematic
UCD相机每个镜头的曝光时间不严格同步,其航摄过程如下[4]:
1)航摄时,第一个镜头到达目标上空,正中心的1个CCD被曝光(图2中的“1”);
2)随飞机的飞行,第二个镜头(主镜头,Master Cone)到达相同位置,四角的4个CCD以及R、B镜头对应的2个CCD曝光(图2中的“2”);
3)第3个镜头到达同一位置时,上下2个CCD以及G和NIR镜头对应的2个CCD曝光(图2中的“3”);
4)第4个镜头到达时,左右2个CCD曝光(图2中的“4”)。至此,整个像幅内所有CCD的曝光操作全部完成。
UCD相机使用的13个 CCD面阵尺寸均为4 008×2 672 pixel,其中形成全色影像的9个 CCD之间存在一定程度的重叠(航向为258像素,旁向为262像素)。CCD获取的全色影像数据通过以主镜头获取的影像为准,通过公共点将从镜头(Slave Cone)影像精确配准到主镜头上,生成一个完整的中心投影影像,以消除曝光时间误差。全色影像通过与同步获取的RGB和彩红外影像进行融合、配准等处理,生成高分辨率的真彩色和彩红外影像产品。
2 应用实例
2.1 测区概况
航摄区域位于西南地区某城市境内,测区平均海拔约500 m,UCD航摄仪焦距为f=105 mm,相对行高ΔH=2 200 m,比例尺约为1/21 000,地面分辨率约为0.2 m,航向与旁向重叠度分别大于65%和30%。影像包括彩色、近红外和全色3种数据。图3为完整的一幅近红外和彩色影像示意图,图4显示的是近红外、彩色与全色实际影像大小。
2.2 DOM的制作与精度分析
DOM制作的主要过程包括航空摄影、像片控制测量、解析空中三角测量(简称空三加密)、DEM数据采集与编辑、影像纠正、编辑、接边、分幅等主要流程(见图5)。

图3 近红外和彩色影像Fig.3 Near infrared and colour image

图4 近红外、彩色全色与全色影像图Fig.4 Near infrared,colour full-color and full-color image

图5 DOM生产技术路线图Fig.5 DOM production technique route map
像控点布设方案为[5]:基线间隔数6~8条,航线跨度2条,全部布设为平高点,即保证每一航线均有一排控制点,并适当增加部分像控点作为空三加密的检查点。像控点的布设方案,见图6。
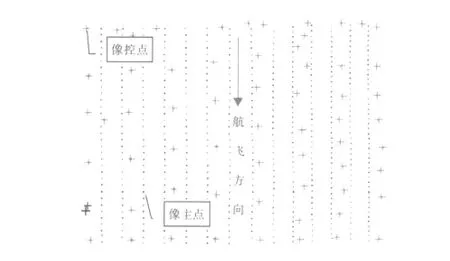
图6 像控点布设示意图Fig.6 Image control points layout schematic
像控点测量采用GPS静态和网络RTK作业测量模式,高程采用该地区的厘米量级似大地水准面精化模型进行转换,其平面精度约为±0.05 m,高程精度优于0.1 m。
空三加密为光束法区域网整体平差方法,使用软件为JX-4摄影测量工作站。加密点残差统计结果如下:
平面位置及高程中误差均为±0.12 m左右。检查点中误差:平面位置为 ±0.22 m(最大为 0.44),高程中误差为±0.35 m(最大为0.74 m)。
实测1∶2 000 DOM图(见图7)上明显地面点100余个,如道路、花台、水池、草坪、围墙等特征地物点,并于DOM图上的同名地物点坐标进行比较,按照式(1)计算平面位置中误差。

式中:MS为平面中误差;Xi、Yi为第i个DOM图上地物点坐标;X′i、Y′i为第 i个点的实测坐标,单位为 m。
检测结果表明:该地区DOM的平面位置中误差为±0.4 m(最大误差为1.0 m,最小为0.07 m),达到了1∶1 000地形图的平面位置中误差(即±0.6 m)的要求。

图7 DOM影像图Fig.7 DOM image map
3 结束语
通过UCD数码航摄相机在西南地区某城市的应用试验得出:采用基线间隔数8条、航线跨度2条的像控点(平高点)布设方案,其空三加密平面位置(检查点)精度约0.2 m(即一个像元大小),DOM同名地物点外业检测其平面位置中误差为0.4 m(即两个像元大小)。
以上结果说明数码航摄相机的制图精度(平面)取决于航摄资料的实际像元大小,其航摄比例尺完全可以放宽至10~20倍(传统光学胶片航摄比例尺与成图比例尺之间的关系一般为6~8倍)。
[1]李健,刘先林,刘凤德,等.SWDC-4大面阵数码航空相机拼接模型与立体测图精度分析[J].测绘科学,2008,33(2):104 -106.
[2]戴腾,张勇,杨华先,等.UCD数码相机影像在武汉测区的应用[J].地理空间信息,2008,6(3):130 -132.
[3]张祖勋.航空数码相机及其有关问题[J].测绘工程,2004,13(4):1-4.
[4]余咏胜,游宁君.数码航摄像机——传统胶片航摄像机的替代者[J].测绘通报,2005(3):6 -10.
[5]邓芳,张俊,刘怡,等.基于UCD/UCX航摄影像的像控点布设方案研究[J].测绘通报,2011(8):8 -12.
Characteristic and Application of UCD Digital Aerial Camera
MA Chun-li,YANG Hong-yan
(Sichuan Institute of Geological Surveying and Mapping,Chengdu Sichuan 610017,China)
Based on the characters of UCD digital aerial camera and the aerial images with 0.2 m ground resolution about a city,the relationship between the accuracy of the digital orthographic map and the size of pixel is discussed.
UCD;DOM;pixel;accuracy
P 231;P 204
B
1007-9394(2012)02-0043-02
2012-03-21
马春丽(1971~),女,新疆石河子人,工程师,现主要从事航测遥感等方面的应用与研究。
