深海管道回接对接机具设计
2012-12-15王立权董金波张岚
王立权 董金波 张岚
哈尔滨工程大学机电工程学院
深海管道回接对接机具设计
王立权 董金波 张岚
哈尔滨工程大学机电工程学院
管道对接机具对接精度的高低关乎深海石油管道法兰连接的成败。因此,通过对国外典型管道对接机具结构和作业情况的分析,综合考虑深水管道安装和操作的环境条件,提出了管道对接机具的总体设计方案:①对接机具采用液压驱动,具有良好的深水适应性;②轴向对准工具和接应工具对管道的夹紧、拖拽、调整等动作均采用液压缸为执行元件;③轴向对准工具和接应工具所需的液压动力源由ROV携带,实现压力油的供给。根据管道对接机具的作业流程,对管道对接机具即轴向对准工具和接应工具的结构进行了设计,分析了其工作原理,为管道对接机具的进一步设计提供了参考。
深海管道 水下回接对接 对接机具 总体方案 结构设计 工作原理
近几十年来,随着海上油气田的不断开发,海底输油气管道已经广泛用于海洋石油运输,铺管作业已成为海底管道建设的重要环节,其敷设及维护技术直接关系到海洋油气开发方案能否顺利进行。
水下管道回接技术是深海管道敷设的重要组成部分,该技术是指将新开发的生产管道并入已建的管网,充分利用已建设施,增加海上油气田开发的经济性,其主要内容包括:管道与平台的连接、管道与管网的连接、管道与立管的连接和管道间的连接等[1]。
目前水下管道回接主要有机械连接和水下焊接这2种方法,其中前者更适用于深水海底管道的回接[2-3]。在机械连接中螺栓法兰连接是目前水下管道连接应用最广泛、最高效的方法,浅水区作业时一般由潜水员辅助操作来完成,但深水区作业时此连接方法的应用就会受到潜水员可安全操作水深的限制,因此,研制出无潜水员操作的自动水下管道回接作业机具具有十分重要的意义。作为回接作业中间环节的管道对接机具,其结构和对准精度的好坏会直接影响法兰连接机具的操作。由此可见,管道对接机具对接精度的高低对深海石油管道法兰连接成败具有非常重要的作用。
1 国外深海管道对接机具
1.1 Sonsub公司的BRUTUS系统
美国Sonsub公司开发的BRUTUS系统是用于深海管道回接的法兰连接系统,此回接系统包括管道对接机具和螺栓螺母库等,在水下机器人(Remotely Operated Vehicle,ROV)的辅助下作业,完成管道的连接和管道法兰螺栓螺母的拧紧工作。
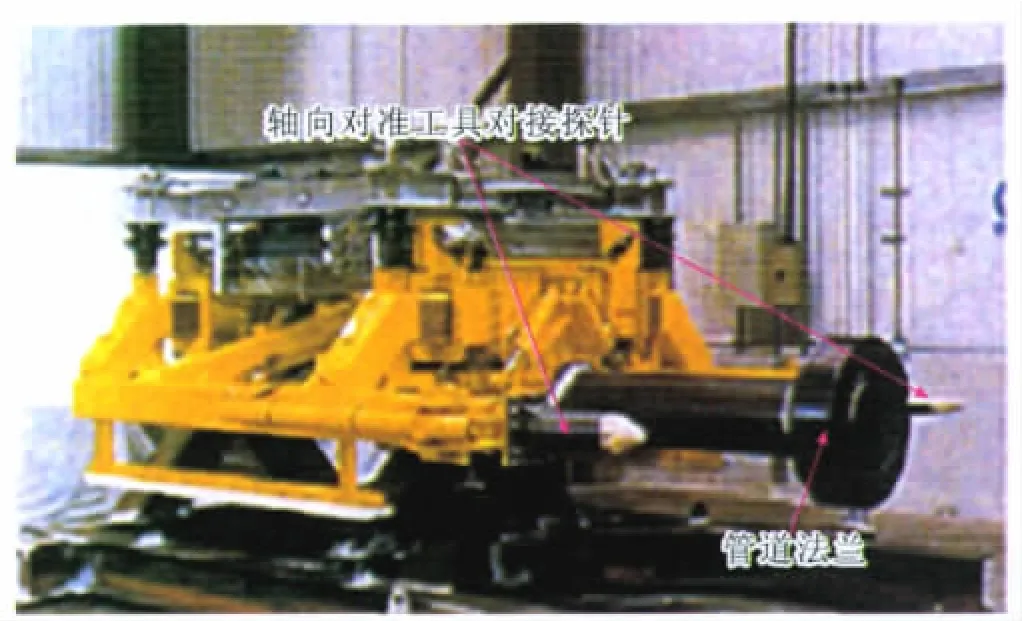
图1 轴向对准工具照片
管道对接机具包括轴向对准工具和接应工具(图1、2),其主要功能是实现新管道与旧管道轴向对准,达到法兰连接机具的工作要求。
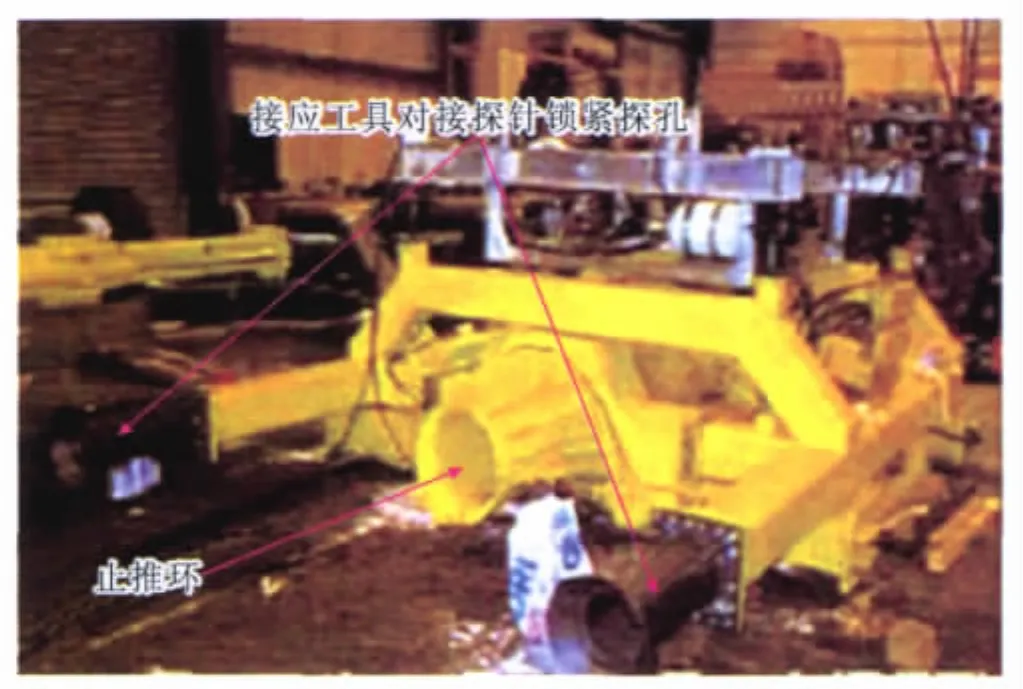
图2 接应工具照片
轴向对准工具由框架、夹紧装置、接应装置、锁紧装置和纵、横向调整装置等组成。轴向接应工具主要由整体框架、内部夹紧装置、止推环和两侧探孔等组成。BRUTUS系统中的轴向对准工具是一个主动的机具,接应工具是一个被动的机具,其主要作用是为轴向对准工具提供工作支点,以此来调整待连接的2个管道法兰面的相对位置,从而达到法兰连接机具的工作要求。
Sonsub公司于2000年秋天在挪威外海400 m水深处分别完成了直径为406.4 mm的管道法兰连接和直径为254 mm的软管法兰连接。深水法兰连接系统的最大工作水深是3 000 m,最大连接管径为609.6 mm,适用于API标准法兰[4-5]。
1.2 Acergy公司的MATIS系统
挪威Acergy公司开发的MATIS深水法兰连接系统由ROV辅助进行操控。该系统采用模块化设计,可依据连接管道的尺寸、工作水深以及管道的形式,采用不同的组合方式,主要包括对准装置、螺栓连接装置和定位装置等(图3)。该系统的轴向对准工具和接应工具是一个整体对准装置(图4),实现对管道的夹紧和轴向对准。
该装置每侧均有5个液压缸来控制其6个自由度,通过安装在液压缸上的传感器来检测2个管道之间的相对误差并实时进行调整以满足后续法兰连接的工作要求[6]。
该机具于1999年第1次在挪威海域为Statoil公司完成了水深98 m、直径为228.6 mm管道法兰的连接,2000年10月又在北海的Gullfaks为Statoil公司完成了水深215 m、直径为558.8~609.6 mm管道法兰的连接,2001年10月在西非安哥拉的Girassol进行了100多个法兰的连接,最大水深达1 400 m,管道法兰直径为228.6~330.2 mm,连接形式包括管道与平台的连接、立管的连接等。Acergy公司的深水法兰连接机具最大工作水深达3 000 m,适用于API标准法兰和ANSI标准法兰,可连接管径范围为101.6~914.4 mm[7-8]。

图3 Deep MATIS系统图

图4 对准装置图
2 管道对接机具的设计
管道对接机具的设计包括2个方面的内容,即轴向对准工具和接应工具的设计,由于2个机具是相互配合使用来实现对待连接管道的调整操作,因此,在设计时应综合考虑2个机具的设计要求。在机具工作前,需用H架将海底待连接的新旧管道从海床上托起到一定的高度,并对其相对位置进行初步调整,以便管道对接机具对其顺利操作。
管道对接机具的工作流程如下:
1)ROV将接应工具放在旧管道上并控制其夹紧管道。
2)ROV将轴向对准工具放在新管道上并控制其夹紧管道。
3)轴向对准工具与接应工具连接锁紧并拖拽新管道向旧管道靠近,使2个法兰面距离达到预定要求。
4)轴向对准工具对管道法兰误差进行纵、横向调整,使其达到预定要求。
5)ROV撤离2个作业机具。
2.1 对接机具设计总体方案的确定
管道对接机具在3 000 m的水下作业,由ROV机械手辅助操作,包括工具的吊放与收起、动力源的携带等。为了方便水下操作,通过水下电视及传感器监测机具的工作,使2个管道法兰的对准精度达到规定的要求。综合考虑国外管道对接机具的工作原理和作业条件,确定如下对接机具设计总体方案。
1)驱动方式:对接机具采用液压驱动,具有良好的深水适应性。
2)执行元件:轴向对准工具和接应工具对管道的夹紧、拖拽、调整等动作均采用液压缸为执行元件。
3)动力源放置:轴向对准工具和接应工具所需的液压动力源由ROV携带,实现压力油的供给。
2.2 管道对接机具的结构设计
2.2.1 轴向对准工具的结构设计
轴向对准工具的总体结构如图5所示,主要由框架、夹紧装置、接应和锁紧装置、调整装置和ROV支架这5个部分组成。

图5 轴向对准工具的结构图
主体框架由空心方钢管焊接而成,形成空间桁架结构,具有较高的强度和稳定性,ROV支架供ROV连接操作使用。夹紧装置与调整装置是轴向对准工具的核心部分,夹紧装置主要作用是夹紧管道,使轴向对准工具调整新管道向旧管道靠近的过程中不松脱,始终保持固定的位置。接应锁紧装置分为2个部分,即探针部分和探孔部分,探针安装在轴向对准工具上,而探孔安装在接应工具上,通过安装在探头T型槽中的导柱与安装在探孔上环形槽进行锁紧。调整装置由纵、横向调整装置2部分组成,均采用液压缸驱动导轨的结构,分别实现对管道沿法兰面的纵向调整和横向调整,使管道法兰面的对准误差在规定范围之内。
2.2.2 接应工具的结构设计
接应工具的总体结构主要由框架、夹紧装置、探孔和ROV支架组成(图6)。框架为高强度的钢架,由空心方钢管焊接而成,能够承载与ROV辅助操作的一些装置,ROV支架供ROV连接操作使用。夹紧装置分前后2部分,分别由2个夹紧液压缸来控制,使整个接应工具夹紧到管道上。探孔和轴向准对工具的探头进行锁紧,轴向对准工具以此为支点实现对管道法兰的纵、横向调整。

图6 接应工具结构图
3 管道对接机具工作原理
实际工作时为轴向对准工具和接应工具安装浮力块,使其在水中可以达到零重力状态。轴向对准工具和接应工具作业示意图如图7所示。

图7 轴向对准工具和接应工具作业示意图
ROV上机械手吊放轴向对准工具和接应工具到H架初步调整好的新、旧管道上,ROV供油,控制2个机具夹紧装置上的液压缸工作,实现对管道的夹紧;随后安装在轴向对准工具接应装置上的接应液压缸工作,推动伸缩杆伸出,使探头插入到接应工具上的探孔内,达到预定位置后,安装在探头内部的锁紧液压缸工作,推动安装其上的锥体向前运动,从而推动安装在探头T型槽内导柱上升运动,使导柱从探头上的孔上伸出,插入到接应工具探孔内部的环形槽中,完成2个机具的锁紧;然后伸缩杆回拉,带动轴向对准工具和管道一起向接应工具靠近,使2个管道法兰面的距离达到法兰连接机具的工作要求。管道的纵、横向调整都是通过ROV供油控制轴向对准工具调整装置上的液压缸工作,使夹紧装置与管道一起沿横向或纵向导轨运动,在传感器和水下电视的监控下使2个管道法兰的对准精度达到要求。
4 结束语
通过对国外典型管道对接机具的组成和作业情况进行分析,综合考虑深水管道安装和操作的环境条件,提出了管道对接机具的总体设计方案,根据管道对接机具的作业流程,对管道对接机具即轴向对准工具和接应工具的结构进了设计,分析了该对接机具的工作原理,为管道对接机具的进一步设计提供了参考。
[1]王立权,王文明,赵冬岩,等.深海管道法兰连接方案研究[J].天然气工业,2009,29(10):89-92.
[2]王立权,王文明,何宁,等.深海管道法兰连接机具的设计与仿真分析[J].哈尔滨工程大学学报,2010,31(5):559-560.
[3]时黎霞,李志刚,赵冬岩,等.海底管道回接技术[J].天然气工业,2008,28(5):106-108.
[4]CORBETTA G,COX D S.Deepwater tie-ins of rigid lines:horizontal spools or vertical jumpers[J].SPE Production &Facilities,2001,16(3):145-150.
[5]HALS B E,REDDY S K,DOUGLAS L D.Diverless tie-in and connection of pipelines/flowlines by use of hard pipe spools[C]∥The 1996 15thInternational Conference on Offshore Mechanics and Arctic Engineering,16-20 June 1996,Florence,Italy.New York:ASME,1996.
[6]Acergy UK Limited.Remote bolted flange connection apparatus and methods of operation thereof:US Patent 7445404[P].2008-11-04.
[7]YAN T,YAN W,DONG Y,et al.Marine fouling of offshore installations in the northern Beibu Gulf of China[J].International Biodeterioration &Biodegradation,2006,58(2):99-105.
[8]VINCENT A,IAN F.Tie-in system uses low-cost flanges on deepwater girassol development[J].Oil &Gas Journal,2002,100(18):96-104.
Design of facilities for deep sea pipeline connection
Wang Liquan,Dong Jinbo,Zhang Lan
(College of Mechanical and Electrical Engineering,Harbin Engineering University,Harbin,Heilongjiang 150001,China)
NATUR.GAS IND.VOLUME 32,ISSUE 4,pp.75-78,4/25/2012.(ISSN 1000-0976;In Chinese)
Facilities for pipeline connection are crucial for the connection of deep sea oil pipeline flanges.Considering the environment of deep-water pipeline installation and operation,the paper hereby proposes the overall design scheme for these facilities based on the study of the structure and the operation of such typical foreign facilities.First,facilities with hydaulic drive can better adapt to deepwater environment.Second,the hydraulic cylinder should be used as actuator while clamping,dragging and adjusting the pipeline with axial alignment tools and tie-in facilities.Third,the hydraulic power needed by the axial alignment tools should be carried by ROV,so as to ensure the supply of pressure oil.The paper designs the structure and analyzes the principles of facilities for pipeline connection,namely the axial alignment tools and tie-in facilities,in accordance with the work flow,which will provide a reference for the further design of such facilities.
deep sea pipeline,underwater tie-in technology,pipeline,interconnection facility,overall scheme,structure design,working principle
王立权等.深海管道回接对接机具设计.天然气工业,2012,32(4):75-78.
10.3787/j.issn.1000-0976.2012.04.019
国家高技术研究发展计划(863计划)项目(编号:2006AA09A105-4)。
王立权,1957年生,教授,博士生导师,博士;参与多项国家高技术研究发展计划(863计划)、国家自然科学基金项目研究;主要从事水下回接技术、水下作业装备和仿生机器人技术研究工作。地址:(150001)黑龙江省哈尔滨市哈尔滨工程大学机电工程学院海洋智能机械研究所逸夫馆110室。电话:(0451)82589251,15636822960。E-mail:45440971@qq.com
(修改回稿日期 2012-02-15 编辑 何 明)
DOI:10.3787/j.issn.1000-0976.2012.04.019
Wang Liquan,professor,born in 1957,holds a Ph.D degree.He has been involved in a number of national high-tech research and development programs(863 Program)and National Natural Science Foundation projects.He is mainly engaged in researches into underwater tie-in technologies,underwater operation facilities and biomimetic robotics.
Add:Room 110,Yifu Building,Institute of Offshore Intelligent Machines,College of Mechanical and Electrical Engineering,Harbin Engineering University,Harbin,Heilongjiang 150001,P.R.China
Tel:+86-451-8258 9251 Mobile:+86-15636822960 E-mail:145440971@qq.com
