体系对抗条件下红外导引头探测系统建模与仿真*
2012-12-10徐振海吴迪军王雪松
张 亮,杨 凯,徐振海,吴迪军,王雪松
(1国防科学技术大学电子科学与工程学院,长沙 410073;2北京仿真中心导弹控制系统仿真国防科技重点实验室,北京 100854)
0 引言
信息化战争条件下的体系对抗是作战双方诸多兵力、武器形成的作战体系在多维战场空间进行的对抗。导弹武器系统仿真研究是体系对抗仿真的重要组成部分,作为红外导弹制导系统输入装置的红外导引头是红外导弹的关键部位,主要用于截获目标信号,并把从任何物理特征背景和干扰中区分出来的目标信号直接传送到红外自动导引系统中,形成导弹相对目标的位置和运动信号,以便能够很好的跟踪目标和输出控制导弹飞行的信号[1]。如何建立满足体系对抗仿真系统需求的红外导引头模型,是目前亟需解决的问题。
文中对体系对抗仿真系统中的红外导引头探测系统进行建模,着重结合实战背景,加入视场判断、地形遮挡判断和传感器饱和判断等实战要素,在此基础上建立红外导引头探测系统的总体模型。最后在CISE平台的支撑下,在整个体系对抗仿真系统中实现了红外导引头模型,为体系对抗条件下红外导弹的仿真提供了支持。
1 系统总体结构和仿真流程
体系对抗条件下红外导引头探测系统的建模仿真必须满足以下功能要求:
①实现战情想定数据库的访问,对红外导引头性能参数进行灵活设置和修改;
②接收导弹的引导信息,在引导信息的指示下实现空域搜索、目标检测等功能,生成探测信息和关键事件信息,并上报给导弹武器系统;
③体现一定的实战要素对红外导引头探测性能的影响;
④将仿真过程产生的关键数据存入数据文件,供显示、仿真回放及事后分析与评估之用。
系统总体结构如图1所示,各模块功能如下:
①战情参数设置模块:实现对战情想定数据库的访问,对红外导引头性能参数、战情参数等进行灵活设置和修改,包括数字地图、天气参数等。
②仿真主控模块:利用数据库得到的参数进行初始化设置,控制探测功能的调度,将仿真过程产生的关键数据存入数据文件,供显示、仿真回放及事后分析与评估之用。
③实战背景判断模块:判断传感器是否已达到饱和(传感器饱和判断);判断目标是否在导引头的视场内(视场判断);判定地形是否阻挡了红外导引头和目标之间的视线(地形遮挡判断模块)。
④目标红外特征数据库:建立所关心目标的红外辐射特征数据库,在仿真中根据目标的红外特征参数,查询目标在观察方向的红外辐射值。
⑤探测模块:根据目标指示信息对指定空域进行探测,包括大气透过率计算模块、大气辐射度计算模块,以及根据红外信号能量、大气透过率、目标距离、噪声等因素计算SNR模块。
⑥输出信息生成模块:根据探测后的结果,生成探测信息和导引头关键事件信息,上报给导引头。
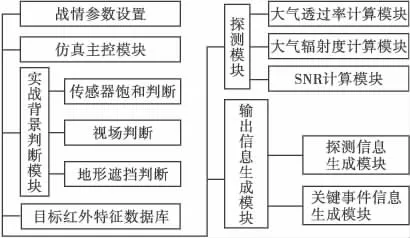
图1 红外导引头探测系统总体结构
图2给出了红外导引头仿真系统探测流程图。虚线框为导引头在工作过程中执行的实战背景判断模块,能更好的适应战场环境。
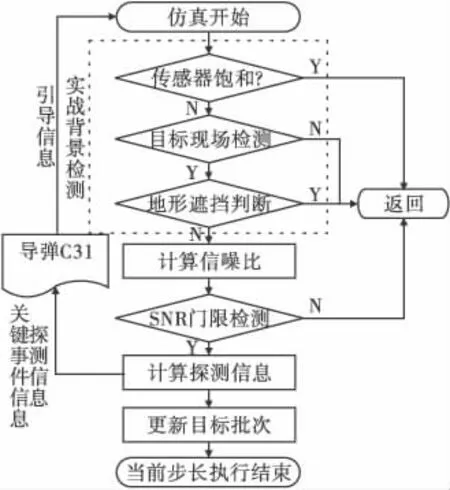
图2 红外导引头仿真系统探测流程图
2 关键模块的数学模型
2.1 传感器饱和判断
红外导引头在背景大气中探测目标的能力与其接收的背景大气辐射量I和传感器的饱和门限(Isat)有关。传感器饱和判断模型首先计算传感器接收的背景大气辐射量,将其与Isat进行对比,若I不小于Isat,则传感器在目标方向已经被背景大气饱和,不能探测目标;否则,传感器能继续探测目标。其中I=Ω×L,L为沿传感器至目标路径的背景辐亮度,Ω=δ×α,方位和俯仰视场宽度δ和α满足:
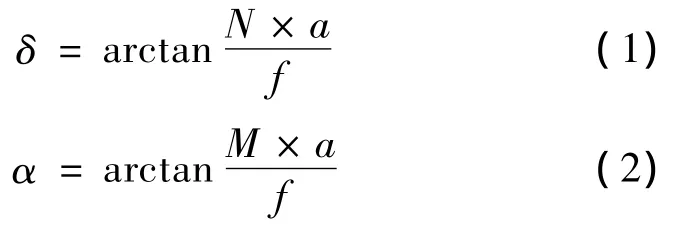
假设探测器为焦平面矩形阵列,其中N和M分别为焦平面行和列上的单边像元数目,a为探测单元的边长,f为焦平面的焦距。
2.2 视场判断
视场判断模型根据导引头的天线视场和导引头与目标之间位置矢量D,判断目标是否在导引头的视场范围内。在地心直角坐标系中定义Horizontal Boresight Vertical(HBV)坐标系,B轴沿导引头焦平面的视轴矢量B,方位视场宽度δ指在HB平面上的全部角度,俯仰视场宽度α指在VB平面上的全部角度。则导引头的视场范围可由B、δ和α来描述。红外导引头的天线视场通常为椭圆形或圆形,且δ和α一般较小,视场判断模型包括以下三个部分。
①在地心直角坐标系下计算视轴矢量B与位置矢量D的夹角θ的余弦值(见式(3)),初步判断目标是否视场内。
②计算HBV坐标系下的视线矢量B,水平矢量H和垂直矢量V。
③得到视场在目标处与HV平面平行的投影椭圆,计算H和V方向上该椭圆的距离C和E,与目标的距离h和v(详细定义见图3),判断目标是否处于椭圆视场内。
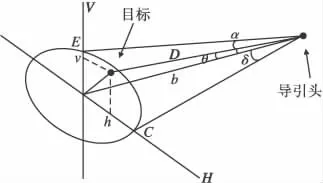
图3 椭圆天线波束在接收机处的投影
视场判断模型具体的流程图如图4所示,需要用到的公式如下。
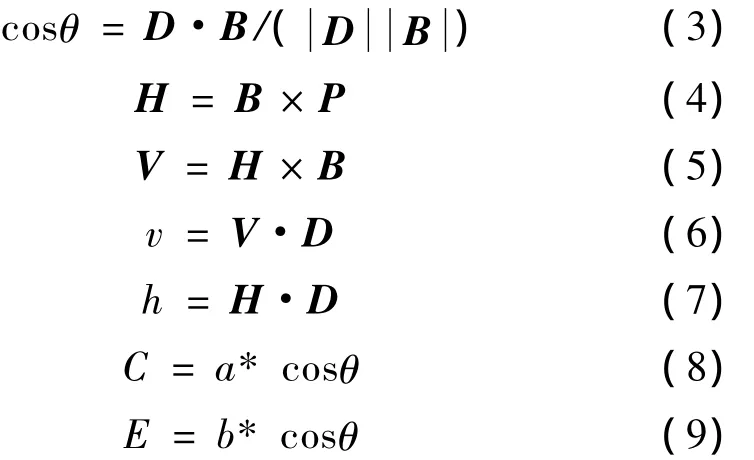
其中P为地心直角坐标系中的导引头位置矢量,a=tanδ,b=tanα。
2.3 地形遮挡判断
地形遮挡判断模型对于工作在复杂地形下的红外导引头来说非常必要,它用来判断导引头至目标之间的视线是否被地形遮挡,若被遮挡,则无法探测该目标。包括三个步骤。
1)用 MaxElev10K(地球半径 +10km)对目标和传感器进行调整,见图5。
2)判断调整后的视线与最大地形高度线是否有交点。若无交点且视线端点高度均高于最大地形高度,则视线不被遮挡;否则,继续下一个步骤。
3)以一定间隔计算视线上每点的高度,将其与地图数据上该点的地形高度相比,判断地形是否存在遮挡。

图4 视场判断模型流程图
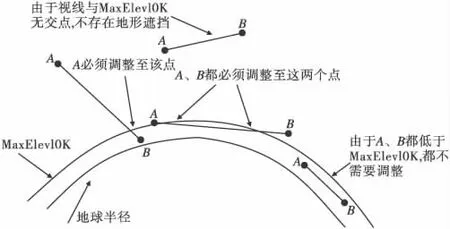
图5 视线调整
2.4 目标红外特性计算
目标物体的红外辐射特征主要取决于物体自身温度分布和表面辐射特性。仿真系统预先将导引头关心目标随观测角度的红外辐射值存入数据库,在仿真过程中根据计算的观测角度进行查询,可大大减少计算量。这里考虑的目标主要包括飞机、各种制式导弹、火箭等在内的空中目标,其可供探测的热辐射主要来自3个部分[2]:一是尾喷管等热发动机部件;二是尾焰气体包括水、二氧化碳、一氧化碳和碳粒等;三是蒙皮,包括空气动力加热和内部热源的辐射以及来自天空、地面和海样等背景辐射的反射辐射。目标的红外总辐射是上述三部分在观察方向观察波段上的线性叠加。
通常,蒙皮和尾喷管可被认为是具有一定发射率的灰体,尾焰的主要辐射区可近似成锥形,此锥形区域在2.7μm和4.3μm处也可视为灰体[2]。灰体的光谱辐射亮度可表示为:

其中:ε为灰体的发射率,M(λ,T)为黑体的辐射率。满足:

C1、C2为常数。则灰体的辐射强度为:

式中,A为灰体在观察方向上的投影面积。也可近似表示为:

其中:σ =5.67 × 10-12W·cm2·K-4,T 为灰体温度。
2.5 信噪比计算模型
红外导引头的探测能力受大气噪声和光学系统噪声的限制。一般采用信噪比来表征红外导引头的探测能力,信噪比的计算如下:

其中:J为目标的红外辐射强度;Tpath为大气透过率;S为传感器与目标之间的斜距;NEFD为噪声等效通量密度。
2.6 等效噪声照度模块
红外导引头的噪声包括其光学系统固有的噪声和大气噪声[3],分别用NEFDs和NEFDb表示,总的噪声等效通量密度为:

大气噪声等效通量密度NEFDb是背景辐亮度L的函数。对于光导型探测器,其对应的噪声等效通量密度为:

对于光伏型探测器,其对应的噪声等效通量密度为:

其中:d为光学系统孔径的直径;λ为工作波段的中心波长;t为探测单元积分时间;h为普朗克常数;c为光速。
2.7 大气透过率模块
红外辐射探测到的是经过大气衰减后的目标辐射强度,因此需要考虑大气衰减对红外辐射的影响。一般来说,红外辐射的大气衰减一般考虑下面几种因素[4]:①大气分子的吸收;②大气分子、气溶胶、微粒等的散射;③ 气象条件雨、雪等的衰减。用 τ1(λ)、τ2(λ)和τ3(λ)分别表示吸收、散射和气象衰减的大气透过率,则大气总的透过率为:

这里采用一种简化的计算模型,设气象条件为:温度T、相对湿度r、降雨强度Jr、降雪强度Js、大气能见度V,红外辐射在斜距S、仰角θ和观察点海拔高度H条件下大气吸收、散射和气象衰减的透过率分别为:

式中:R为等效的海平面水平面路程,β为常数:水蒸气时,β =0.0654;二氧化碳 时,β = 0.19。μH2O和 μCO2分别为大气温度5℃,相对湿度100%时水蒸气和二氧化碳的光谱吸收系数,fT为温度为T为时饱和空气中的水蒸气质量;q为与视距有关的经验常数。

图6 背景辐射度随波长变化示意图
2.8 背景辐射亮度
大气背景辐射包括大气自身气体分子和气溶胶的红外辐射、太阳辐射、天地背景辐射以及由于大气分子和气溶胶的散射作用而进入到探测器的红外辐射。在特定的经纬度下,天空背景辐射亮度随高度、日期、时间、观测方位角、水平角等因素变化,其中高度的影响最大[5]。在红外波段,可用45°或135°时的背景辐射代替平均背景辐射[5]。鉴于红外导引头的波段一般是3~5μm和8~12μm,根据文献[5]拟合这两个波段的数据如图6所示,然后选取了天空背景辐射亮度最大和最小值两组数据进行考察,得到其随高度的变化见图7。在实际的工程使用中,用曲线拟合的方式即可计算相应的背景辐射度。
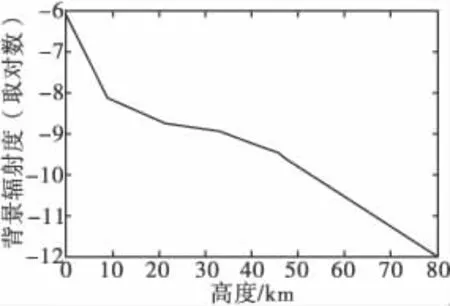
图7 背景辐射度随高度变化示意图
2.9 探测信息生成
红外导引头探测系统在执行完传感器饱和判断、目标视场检测、地形遮挡判断和SNR门限检测后,若确定传感器能检测到目标,则生成探测信息,并上报红外导弹C3I,探测信息的主体包括目标在弹体坐标系下的方位角和俯仰角。将地心直角坐标系下导引头与目标之间位置矢量D转换成弹体坐标系下位置矢量Db(xb,yb,zb),则方位角Et和俯仰角为:

3 模型开发与仿真应用
红外导引头仿真系统在基于组件的一体化建模仿真环境(CISE)下实现。CISE是一个集成一体化的建模、运行、分析评估环境,基于组件技术建立系统模型,其组件的实体行为模型则由其它专用实体建模软件如VC开发,统一集成到CISE模型组件框架中[6]。多个组件复合成平台,平台是包含C3I规则、运动处理、传感器、通信设备、干扰设备和武器系统等的综合,体系对抗可看成是作战双方多个平台形成的体系之间的对抗。将红外导引头视为一个组件,集成到导弹武器子系统中,子系统界面和接口定义如图8所示。红外导引头接收导弹武器发送的传感器目标指示信息和己方武器运动信息,经过探测,将导引头探测信息和导引头关键时间信息上报给导弹武器系统,而目标平台运动信息由整个导弹武器子系统接收,提供给导弹中导引头组件、通信组件和干扰组件。
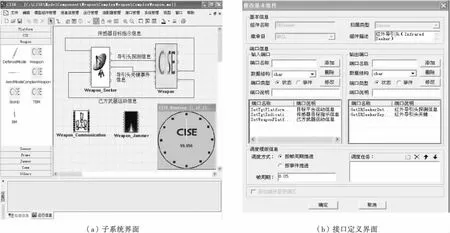
图8 CISE开发的红外导引头仿真系统
4 结论
文中基于体系对抗仿真系统中红外导引头探测系统的建模需求,通过分析其功能要求来确定其模块组成,并对关键模块的数学模型进行了详细的描述。利用CISE平台建立了红外导引头组件,将其添加至红外导弹武器子系统,最后作为飞机平台的携带子系统整合至平台,作为体系对抗中武器系统对抗的重要组成部分。文中的模型已在某项目中得到了应用。下一步的主要工作在于如何利用整个仿真系统进行作战预案分析优化和战术应用效果评估。
[1]方辉煜.防空导弹武器系统仿真[M].北京:中国宇航出版社,2005.
[2]王霞,陈华础.视线方向上飞机红外特性计算方法[J].大气与环境光学学报,2008,3(3):217-222.
[3]张晓宏,龚文平.红外导引头测量目标信号的数学仿真[J].计算机仿真,2000,17(2):24-28.
[4]周国辉,刘湘伟,徐记伟.一种计算红外辐射大气透过率的数学模型[J].红外技术,2008,30(6):331-334.
[5]张晓宏,杨维全,张津.红外导引头大气层内探测能力的仿真分析[J].红外与激光工程,1999,28(6):68-71.
[6]卿杜政,李伯虎,孙磊,等.基于组件的一体化建模仿真环境(CISE)研究[J].系统仿真学报,2008,20(4):900-904.
