激光引信岀射激光束发散角的测量*
2012-12-10王国星魏志芳
王国星,马 冲 ,魏志芳
(1中北大学机电工程学院,太原 0 30051;2中国计量科学研究院,北京 1 00013)
0 引言
激光引信是利用激光束对目标探测识别,按预定设置条件适时可靠的控制弹药引爆的系统。激光引信具有高时空分辨率,高定距精度,高抗干扰能力强的特点,目前广泛配用于多种类型的战术导弹,如航空炸弹、火箭导弹、反坦克导弹等。
激光引信的目标探测区是岀射激光束发散角与接收视场角的重叠区域,目标只有进入到该区域,接收机才能探测到目标反射的激光回波,经光电探测器转化为电信号,馈送到点火线路适时起爆战斗部。激光引信总体设计中,需要根据弹种的类别、弹目接近时的相对速度、激光脉冲的频率等多种条件,确定目标探测区,即确定岀射激光束发散角与接收光学系统视场角指标。因此,激光引信发射组件研制时,岀射激光束发散角的准确测量十分重要,以满足指标要求,确保目标探测的可靠性和稳定性。
1 激光引信岀射激光束的特点
引信用激光器因受体积、重量、稳固性的限制,通常采用结构简单,不易受损,电源轻便且易于调制的半导体激光器。半导体激光器岀射的激光束发散角具有各向异性的特点[1]:垂直于p-n结方向的激活层狭窄,衍射作用较强,发散角大;平行于p-n结方向的激活层宽厚,衍射作用较小,发散角小。因此激光引信发射组件中激光器岀射的光束为椭圆形光斑。根据系统设计的要求,激光器岀射的光束需要通过光学系统准直(通常使用单透镜),准直后的激光束垂直方向的发散角约为6°,水平方向的岀射角约1°。根据高斯光束经过薄透镜的变换规律和传输特性,半导体激光器出射的激光束经光学系统准直后仍为高斯光束。
高斯光束横截面内光强呈高斯分布,光斑中心最亮,向外逐渐减弱,无清晰锐边。通常以光强衰减至最大值的光束直径定义为高斯光束光束直径d(z),光束直径最小位置为束腰d0,光束直径与束腰的关系为:

式中zR为高斯光束的瑞利长度。高斯光束的光束直径按双曲线规律沿传播方向由束腰向外扩展,激光束的远场发散角Θ定义为双曲线两条切线的夹角:

2 激光束发散角测量原理
从式(2)看出,测量激光束发散角,可通过测量无穷远处光束直径或束腰得出。但测量无穷远处光束直径并不现实,且束腰通常在激光器输出平面镜上,量值较小,不便测量。目前测量激光束发散角时,需要加薄透镜对高斯光束进行变换,如图1所示。
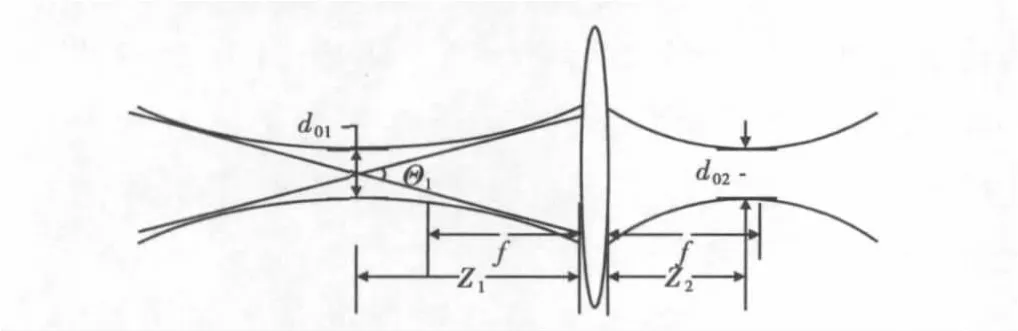
图1 经薄透镜变换的高斯光束
可证明变换前的高斯光束束腰d01与变换后的束腰d02、透镜焦距 f及透镜到束腰的距离 z2有如下关系:

对式(3)变形得:

其中df2是透镜后焦面上的光束直径,将式(2)代入式(4)得:

从式(5)看出,透镜焦距f已知,激光束发散角Θ1的测量可转换为后焦面上光束直径df1的测量,此种测量激光束发散角的方法称为焦面法[2]。
激光光束直径通常采用CCD探测。激光引信岀射激光束发散角测量装置如图2所示。
引信发射组件岀射的激光束功率通常在瓦级水平,为了避免CCD饱和甚至损伤,岀射光束需要衰减。CCD探测器接收面放置在透镜后焦面上,用于探测入射光斑的功率密度分布E(x,y)。光束直径等于4倍的功率密度分布的二阶矩,此方法称为4σ法[3]。
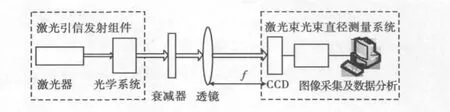
图2 激光引信岀射激光束发散角测量装置


3 准确测量激光束发散角的关键技术
3.1 实验条件
激光束发散角测量前,应保证实验条件,尽量减小系统误差,主要有:引信岀射激光源预热半小时,以获得稳定的激光输出;调节测量系统光轴与激光束同轴,光束穿过衰减片及透镜几何中心;选用高分辨率,高信噪比的CCD探测器;实验过程中做好外部光辐射屏蔽、确保实验室温湿度稳定,避免反射、衍射,外部背景光,热辐射,空气扰动引入的系统误差。
3.2 背景噪声去除
CCD探测到的激光功率密度分布Emean(x,y)可以分为两部分:被测光束入射的功率密度分布E(x,y);由背景辐射或探测器噪声产生的背景图像EB(x,y)[4]。

其中背景信号进一步分为本底偏移量EB,offset(x,y)和高频随机噪声信号 EB,noise(x,y)。

高频随机噪声信号决定了统计误差,仅影响光束直径的测量重复性。可以通过多次重复测量取平均值的方法,减小其引入的误差。
本底偏移量引入系统误差。在光束直径计算前,需要去除本底偏移量,以减小其对积分计算的影响。保证同样的实验条件,将激光源入射光遮挡,取n次(n>10)单次本底测量的平均值作为本底偏移量EB,offset(x,y)。

校正后的功率密度分布E(x,y)为:

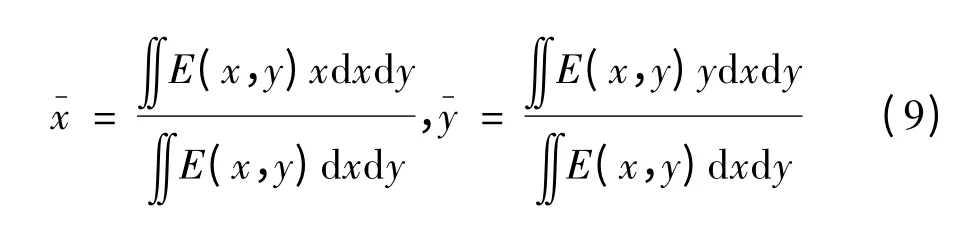
3.3 积分区域的选取
从功率密度分布二阶矩式(7)、式(8)可看出,积分与(x - x-)、(y - y-)的平方有关,如在偏离质心较远处出现噪声信号,会极大影响积分的计算结果。所以在计算一阶矩、二阶矩时应选取恰当的积分区域,积分区域的大小可根据被测光斑大小、探测器接收面尺寸、噪声情况确定,通常为光束直径的1.5~3倍[3]。
积分区域的选取可采用如下方法:计算光束直径前,初步测得一组背景噪声校正的功率密度分布图像数据,分别计算图像每一纵列像点的灰度和,选取灰度和的最大值,以该列作为水平中心线。选取最大值的10%作为阈值(积分区域大致为光束直径的2倍),以中心线向左 /右扫描,低于阈值的像素列停止,作为左右边界。上下边界的确定方法类似。
4 测量结果及不确定度
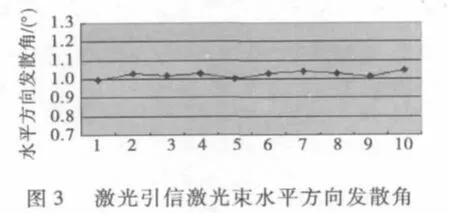
使用上述激光束发散角测量方法及装置,实际测量激光引信岀射激光束的发散角。光束直径测量仪已经过校准,水平方向与垂直方向光束直径测量值的修正系数均为0.99,不确定度为U=5%(k=2)。透镜焦距为100mm,不确定度为U=1%(k=2)。激光引信岀射激光束发散角测量结果如图3、图4所示,数据表明水平方向发散角测量重复性为1.6%,垂直方向发散角测量重复性为1.2%。

测量结果不确定度[5]的分量如表1所示。

表1 不确定度分量汇总
合成标准不确定度u为:

测量结果表示如下:水平方向发散角为1.02°,扩展不确定度为U=6.4%(k=2);垂直方向发散角为6.05°,扩展不确定度为 U=6.0%(k=2)。该指标满足激光引信设计要求。
5 结论
采用焦面法,激光引信岀射激光束发散角的测量转化为激光束光束直径的测量。使用CCD测量光束直径时,实验条件的保证,背景噪声的去除及积分区域的选取直接决定着测量结果的准确度,是光束直径测量的重要环节。
此外,ISO中提到的另一种发散角测量方法是,通过测量传输轴不同位置光束直径,采用最小二乘双曲线拟合,确定激光束传输轨迹[3]。此种方法可以同时计算出激光束发散角、束腰、M2等参数,但比起焦面法测量装置复杂,测量准确性较差。
[1]成都电讯工程学院.激光器件[M].长沙:湖南科学技术出版社,1981.
[2]屠钦澧,张自襄.激光实验原理和方法[M].北京:北京工业学院出版社,1988.
[3]ISO 11146-1 Test methods for laser beam widths,divergence angles and beam propagation ratios-part1:Stigmatic and simple astigmatic beams[S].2005.
[4]ISO/TR 11146-3 Test methods for laser beam widths,divergence angles and beam propagation ratios-part 3:Intrinsic and geometrical laser beam classification,propagation and details of test methods stigmatic and simple astigmatic beams[S].2004.
[5]JJF 1059-1999测量不确定度评定与表示[S].北京:中国计量出版社,1999.