智能完井井下流量阀液压控制系统设计
2012-12-08盛磊祥许亮斌蒋世全周建良何东升
盛磊祥,许亮斌,蒋世全,周建良,何东升
(1.中海油研究总院,北京100027;2.西南石油大学,成都610500) ①
智能完井井下流量阀液压控制系统设计
盛磊祥1,许亮斌1,蒋世全1,周建良1,何东升2
(1.中海油研究总院,北京100027;2.西南石油大学,成都610500)①
智能完井系统通过对井下产层流体参数的监测和控制,可以实现多层合采、层间优化、单采等多生产模式的任意切换。目前提供智能完井服务的公司都推出了以液压驱动为主要控制形式的井下流量阀控制系统,并在油田生产中成功应用。结合智能完井的技术要求,提出了一套井下流量控制液压系统的设计方案,可实现井下多目的层的分层选择和控制,利用3条控制管线,即可实现目前油田生产所需的2~6层的开发需要,可以减少安装过程中连接穿越管线的繁琐工作,为智能完井配套工具的标准化提供了支持。
智能完井;流量控制;液压解码器;液压发生器
1 智能完井技术特点
智能完井系统通过对井下生产层流体参数的监测(压力、温度、流量等)和控制,以远程控制的方式实时对油层进行监控,满足油井生产要求。智能完井系统分为井下状态监测系统和井下流量远程控制系统2个部分。井下状态监测系统主要利用安装于井下的传感器和仪表,通过通讯系统传输到地面,监测井下流体动态参数;井下流量远程控制系统主要借助液压或电力系统实现对井下流量控制阀的开关调整,以实现对生产状态的控制。井下流量远程控制系统是智能完井与常规完井最大的不同,它能够实现生产层井下工具的远程调控,无需通过钢丝作业即可实现油井动态的调整,从而最大程度的保障了油井的正常生产[1]。根据布置形式,智能完井可分为2种基本形式,如图1所示,①封隔器+井下流量控制阀实现对油层的封隔,有n个需要分割的生产层段,就增加n套封隔器+井下流量控制阀;②利用带外套的井下流量控制阀,实现对生产层的封隔控制,有n个需要分割的油层段就需要n-1个外套。受到控制阀尺寸的限制,封隔器+井下流量控制阀的布置形式通常适用于井径>127mm(5英寸)的井,在裸眼完井、套管完井中使用较多。在砾石充填防砂的井筒中,井眼尺寸较小,带环空外套的井下流量控制阀,由于其无需将控制阀安装在产层段,不受产层井筒尺寸的限制,所以在防砂井中采用带环空外套的井下流量控制阀的布置形式。
目前主要有5家公司提供智能完井服务[2-6]:Welldynamics、Baker Hughes、Schlumberger、Weatherford、BJ。Welldynamics推出以液压控制为主导的系列产品,包括微型液力(Mini Hydraulics)、直接液力(Direct Hydraulics)、数字液力(Digital Hydraulics)、SCRAMS系统,均由液压实现控制。Baker Hughes的智能完井技术分为2大系统,包括In Charge系统和In Force系统,InCharge系统是电力驱动的井下流量控制阀系统,但由于In Charge性能上不可靠,在Baker Hughes的网站上已基本看不到In Charge的相关资料,In Force系统是全液压驱动的开关控制阀。Schlumberger的井下流量控制阀主要有3个系列,包括液力驱动可回收流量控制器TRFC-HN、便携式液力驱动可回收流量控制器、电驱动可回收流量控制器TRFC-E(tubing-retrievable flow controller)。Weatherford的井下流量控制称为ROSS系列,包括ROSS用于井下流量的开关控制,ROSS-V用于井下流量的多位控制,ROSS-T用于高温井的流量开关控制,均采用液压驱动的方式。BJ的井下流量控制阀称为SHARP Well Completion System,提供井下多层位的流量控制,液压驱动。
从以上几家主要的供应商的技术可以看出,智能井下流量控制主要采用液压驱动或电驱动2种形式。液压控制的井下流量控制系统是目前的主流,各大服务公司都有各自的液压控制系统。本文结合智能完井的技术要求,提出了一套井下流量控制液压系统的设计方案,能够为智能完井井下流量控制阀的设计和操作提供参考。

图1 智能完井基本形式
2 井下流量阀液压控制系统
智能井井下流量控制阀要求能够实现井下油气分层生产控制,实现多层合采、及层间优化、单采等多生产模式的任意切换。如果只有1个产层,可以将液压动力管线直接连接到井下流量控制阀的动作腔内,实现阀的调控;如果涉及多个产层,通常需要下入更多的液压管线,繁多的液压管线必然为安装过程带来麻烦,并使得地面动力系统占据更多的空间。因此,对于多生产层的油井,需要首先通过井下解码装置,选择需要操作的目标层位,然后将动力液引向目标层位控制阀的动作腔内,实现控制动作。
因此,井下流量控制阀液压控制系统需要实现2个功能,即,产生控制阀动作所需的动力液,选择并引导动力液进入目的层的动作阀腔。前者由井口液压动力及信号发生系统在地面产生多个稳定的液压力信号,后者由井下液压解码器根据液压信号指令和管线序列实现。
2.1 井口液压动力及信号发生系统设计
井口液压动力及信号发生系统同时提供液压动力和液压信号。信号由无效信号和有效信号组成。系统设置一个门槛压力,低于这个门槛压力,系统认定为无效信号,或者为杂散信号,对井下系统不起作用。有效信号指系统压力达到一定值时,井下系统将这个压力认定为有效信号。有效信号根据压力大小分别表示门槛压力信号、高压信号。这样系统可识别0压力信号、门槛压力信号、高压信号3个压力信号。
2.1.1 系统组成
液压动力及信号发生系统在地面提供井下执行原件的动力,同时提供井下位置控制的液压信号。系统由液压油源、动力装置和溢流阀组所组成,如图2所示。该系统可向井下提供2个标准额定压力:门槛压力、高压,并能够防止无效信号对井下工况的干扰。

图2 井口液压信号发生系统原理
本文以其中1条管线为例说明系统的工作方式:油箱温度传感器、液位传感器的信号传到控制计算机。液压油经油箱滤油器到9#液压泵,液压泵由8#变频电机驱动,通过调节变频器的频率可调节电机转速,实现液压泵排量的调节。14#单向阀只允许液压油流出液压泵,以保护液压泵免受回流冲击。设定18#溢流阀为门槛压力、19#溢流阀为高压。设定16#先导式溢流阀的1个较大的开启压力(大于19#溢流阀设定的高压值)。该系统向井下提供2个标准额定压力。过程是:
1) 门槛压力的启动 17#启动电机,将二位四通电磁换向阀左边通电,16#先导式溢流阀的先导控制液压油经左位流向18#溢流阀,当管线压力等于溢流阀设定的压力时,18#溢流阀打开,先导控制液压油流回油箱,由此打开16#先导式溢流阀(主阀),液压油由16#溢流阀流回油箱。系统压力保持为18#溢流阀设定的门槛压力。系统压力可由管线上的10#压力表观察到,也可以由管线上的压力传感器传到计算机上。
2) 高压的启动 将17#二位四通电磁换向阀右边通电,16#先导式溢流阀的先导控制液压油经右位流向19#溢流阀,当管线压力等于该溢流阀设定的压力时,19#溢流阀打开,先导控制液压油流回油箱。由此打开16#先导式溢流阀(主阀),液压油由16#溢流阀流回油箱,系统压力保持为19#溢流阀设定的高压。系统压力可由管线上的10#压力表观察到,也可以由管线上的压力传感器传到计算机上。
液压油经36#管线滤油器、39#截止阀流向井底。36#滤油器过滤管线液压油,向井底提供清洁液压油;39#截止阀在必要时实现紧急关断油路。紧急泄压时,15#二位二通电磁阀通电,系统液压油经该阀左端直接流回油箱,系统压力变为0,实现紧急泄压。系统断电时,17#电磁阀回到中位,先导控制液压油经中位H型流道流回油箱,由此打开16#先导式溢流阀,液压油由16#溢流阀流回油箱,系统泄压。
其他管路的作用机理一样。将18#、25#、32#溢流阀的压力设定为统一的门槛压力,19#、26#、33#溢流阀设定为统一的高压。将16#、23#、30#先导式溢流阀本身的压力设定为更高的压力。由此在任意一条管路上均可以实现门槛压力、高压及应急泄压功能。
2.1.2 液压指令设计
液压信号由无效信号和有效信号组成。系统压力为零认定为无效信号,对井下系统不起作用。有效信号指系统压力达到一定值时(与井下液压解码器设计的压力有关),井下系统将这个压力认定为有效液压信号。液压信号指令设计如表所示,以目的层1的控制指令为例,利用控制线1和2对目的层1施加液压指令,控制线3为回流管线,先对控制线1施加有效液压信号,保持此压力信号,然后再对控制线2施加有效液压信号,实现目的层1的选择控制指令。
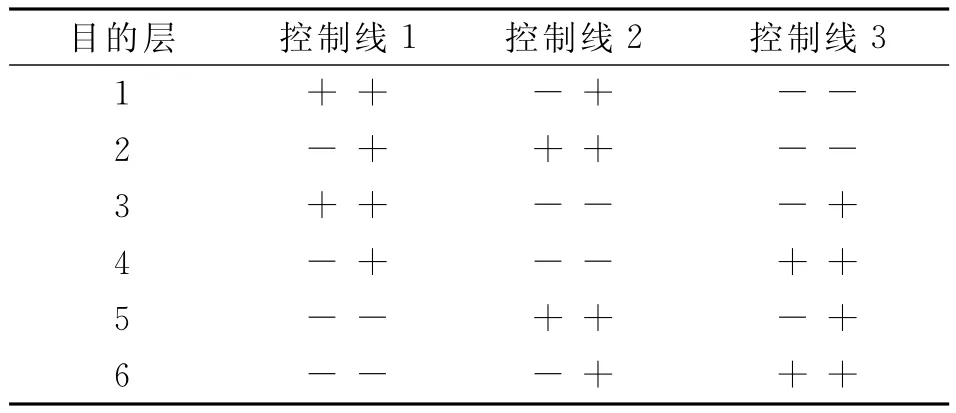
表1 层位控制原理
3 井下液压解码器设计
井下液压解码器设计旨在利用有限的液压管线,实现尽可能多的目的层位置的选择。本文提出的设计方法利用n条液压管线,实现对井下P2n个生产层位的识别和动力液引导。以3条液压管线为例,通常条件下,仅能实现对2个井下生产层位的选择和控制,如果使用该解码装置,则可以对井下最多6(P23)个生产层位的选择和控制。
井下液压解码器设计如图3所示,包括液压控制管线、液压解码器、压力指令。液压控制管线主要传递液压动力和压力指令,液压解码器采用2个液控的二位二通阀组成,它可以识别不同的压力指令序列,根据不同的指令将动力液引向目的层位,压力指令根据液压解码器的设计,预设压力信号,不同的压力信号序列对应不同层位的操作。
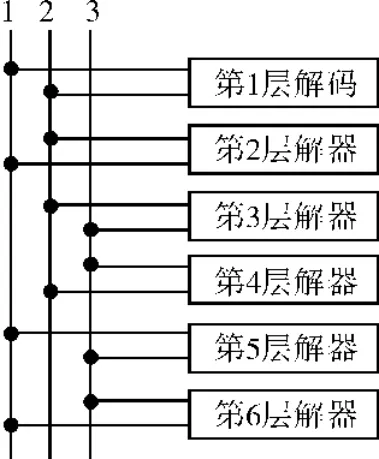
图3 智能井井下解码层位选择原理
每一层只采用2条液压管线参与解码,每个层位由2条液压管线进行控制。由不同的控制管线组合12(1和2液压控制线路)、23、13可以把6个生产层分为3个层组:第1层和第2层、第3层和第4层、第5层和第6层,每个层组由相同的2条线路进行控制。例如,第1、2目的层均由线路组合12进行控制,第3、4目的层均由线路组合23进行控制,第5、6目的层均由线路组合13进行控制。要区分其中的2个目的层,只需施加不同的压力序列信号即可。6个目的层位采用的液压控制线和压力指令施加的序列如表1所示。如图4a所示,如果要对第1目的层进行控制,可以先对管线1施加数字压力信号,然后再对管线2施加数字压力信号;反之,如图4b所示,如果要对第2目的层进行控制,可以先对管线2施加数字压力信号,然后再对管线1施加数字压力信号;其他的层位不会动作。
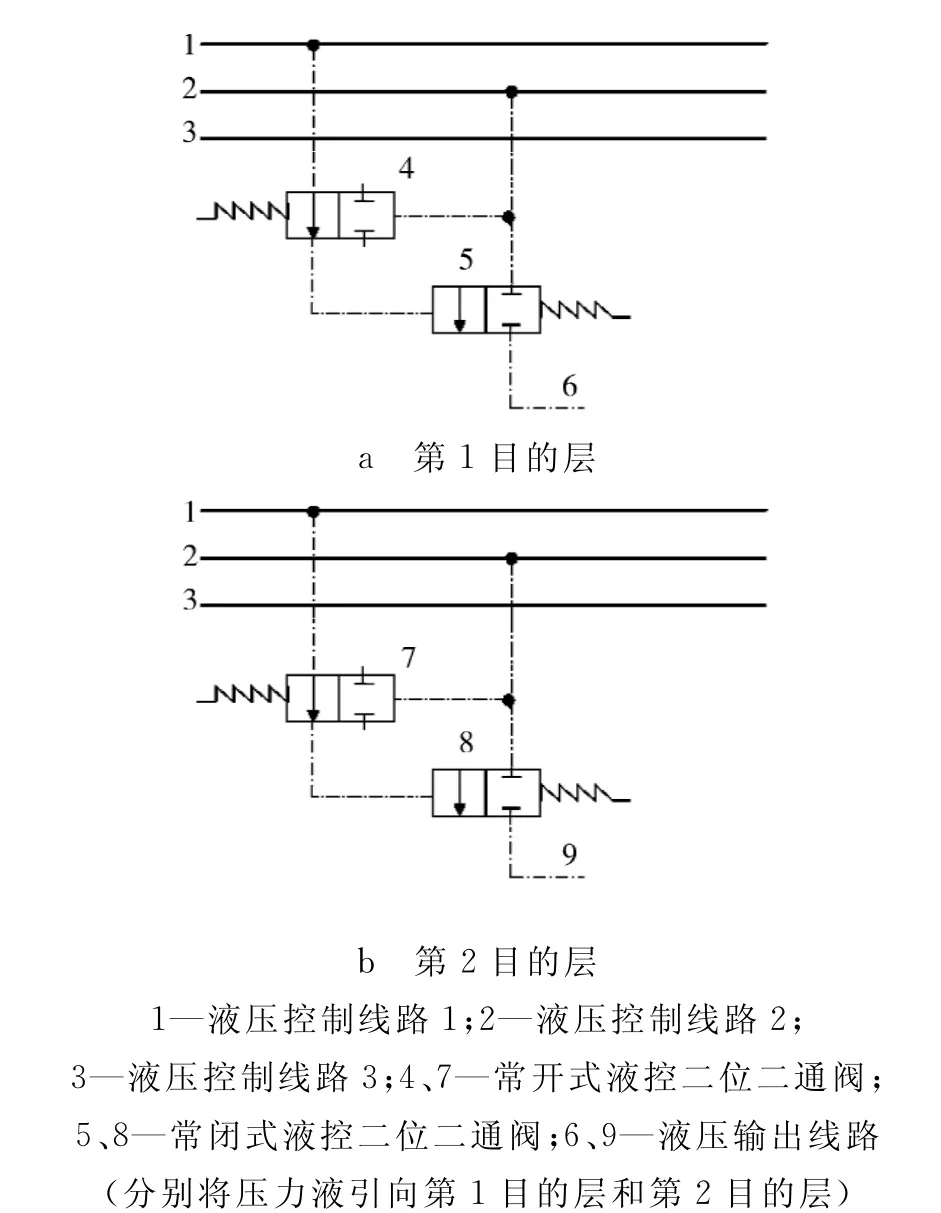
图4 智能井井下解码原理
通过向不同的液压管线发送不同的压力序列,由井下液压层位选择解码器识别来自不同管线的压力序列指令,按照预先设置的层位对应的指令,将动力液引向需要进行操作的控制阀腔内,实现目标层位的选择和控制。
以3条管线其中的线组12(1和2液压控制线路)为例,液压管线1和2实现对第1目的层和第2目的层的选择控制过程如下:
如果对第1目的层进行流量操作时,如图4a所示,利用地面液压动力系统首先在液压控制线路1上施加高压信号,高压信号通过常开式二位二通阀4#流向常闭式二位二通阀5#的控制腔,使二位二通阀5#导通,此时再向液压控制管线2#上施加高压信号,液压控制信号通过常开式二位二通阀4#右端控制油腔,断开常开式二位二通阀4#,由于液压控制管线1上继续施加高压,常开式二位二通阀4#无法泄压,常开式二位二通阀4和常闭式二位二通阀5#间的控制管线间液压油均不会回流,常闭式二位二通阀5保持开启状态,液压控制管线2中的高压油通过常开式二位二通阀5#流向解码控制管线6#,实现本层的解码和操控。完成解码后,液压控制管线1、2的液压油压力归零,常开式二位二通阀4控制腔压力为0,常开式二位二通阀4#复位,常开式二位二通阀4#处于开启状态,常闭式二位二通阀5#控制腔的液压油通过常开式二位二通阀4#流回液压控制管线1,常闭式二位二通阀5#关闭,同时关闭目的层。
如果对第2目的层进行流量操作时,如图4b所示,利用地面液压动力系统首先在液压控制线路2上施加高压信号,高压信号通过常开式二位二通阀7#流向常闭式二位二通阀8#的控制腔,使二位二通阀8#导通,此时再向液压控制管线1上施加高压信号,液压控制信号通过常开式二位二通阀7#右端控制油腔,断开常开式二位二通阀7,由于液压控制管线2上继续施加高压,常开式二位二通阀7#无法泄压,常开式二位二通阀7#和常闭式二位二通阀8#间的控制管线间液压油均不会回流,常闭式二位二通阀8#保持开启状态,液压控制管线1中的高压油通过常开式二位二通阀8#流向解码控制管线9#,完成本层的解码和操控。完成解码后,液压控制管线1、2的液压油压力归零,常开式二位二通阀7#控制腔压力为0,常开式二位二通阀7复位,常开式二位二通阀7#处于开启状态,常闭式二位二通阀8#控制腔的液压油通过常开式二位二通阀7#流回液压控制管线1,常闭式二位二通阀8#关闭,同时关闭目的层。
其他线组23和线组13对第3、4目的层和第5、6目的层的解码和操控过程与上述线组12对第1、2目的层的控制机理相同。
4 结论
1) 为了生成井下解码器所需要的稳定的液压信号,设计了井口液压动力及信号发生系统,能够向井下提供2组有效的压力信号和液压动力,也能够有效地识别无效信号或者为杂散信号,紧急条件下可实现系统快速泄压。
2) 井下液压解码器利用n条液压管线实现对井下P2n个生产层位的识别和动力液引导。以3条液压管线为例,通常条件下,仅能实现对2个井下生产层位的选择和控制,如果使用该解码装置,则可以对井下最多6(P23)个生产层位的选择和控制,而如果不使用液压解码器,完成6个生产层位的控制至少需要7条液压管线。
3) 目前智能完井层数应用的记录是6层[7],实际上目前智能完井应用层数最多的是2~3个生产层[8-10],因此本文提出的3条管线控制的井下流量控制阀的控制系统可实现2~6个生产层的控制,能够满足目前油田生产的需要,同时有利于智能完井配套工具(例如穿越封隔器的设计)的标准化。
[1] 王兆会,曲从锋,袁进平.智能完井系统的关键技术分析[J].石油钻采工艺,2009,31(5):1-4.
[2] Intelligent Completions[EB/OL].[2011-09-20].http://www.halliburton.com/ps/default.aspx?navid=825&pageid = 2018&prodgrpid = PRG% 3a%3aK40OJP15.
[3] Intelligent Completions Overview[EB/OL].[2011-09-20].http://www.slb.com/services/completions/intelligent.aspx.
[4] Increase profit by reducing risk and minimizing life-ofwell cost[EB/OL].[2011-09-20].http://www.bakerhughes.com/products-and-services/completions/wellcompletions/packers-and-flow-control.
[5] Intelligent Completion Systems[EB/OL].[2011-09-20].http://www.bjservices.com/website/Completions.nsf/IntelligentFrameset?openframeset.
[6] Reservoir Monitoring[EB/OL].[2011-09-20].http://www.weatherford.com/Products/Production/ReservoirMonitoring/.
[7] 刘 飞,陈 勇,李晓军,等.智能完井新技术[J].石油矿场机械,2010,39(2):87-89.
[8] Arashi Ajayi,Shawn Pace,Rryan Petrich.Managing Operational Challenges in the Installation of Intelligent Well Completion in a Deepwater Environment[R].SPE116133,2008.
[9] Jesse Constantine.Installation and Application of an Intelligent Completion in the EA Field Offshore Nigeria[R].SPE116133,2004.
[10] Jackson V B,Tips T R.Case Study:First Intelligent Completion System Installed in the Gulf of Mexico[R].SPE68128,2001.
Design of Hydraulic Control System for Intelligent Completion Downhole Flow Valve
SHENG Lei-xiang1,XU Liang-bin1,JIANG Shi-quan1,ZHOU Jian-liang1,HE Dong-sheng2
(1.CNOOC Research Institute,Beijing100027,China;2.Southwest Petroleum University,Chendu610500,China)
By monitoring and controling of production layers,intelligent completion can achieve different production modes,includes separate production,multi-layer production,and optimization production.At present,all the intelligent completion service corporations provide flow valve system controlled mainly by hydraulic pressure,which is used successfully in field.According to the technology feature of intelligent completion,a new design method of downhole flow valve hydraulic control system is proposed,which can achieve control of multi-layer production,using 3control hydraulic lines to control 2-6layers,and relieve the excess work of installation of the complex hydraulic lines,and be in favor of standardized for intelligent completion related accessories tools.The design method proposed in this paper can be reference to the design and operation of downhole flow valve control system.
intelligent well completion;flow control;hydraulic decoder;hydraulic generator
1001-3482(2012)04-0034-05
TE925.303
A
2011-10-12
国家重大专项“深水油气田开发钻完井工程配套技术”(2008ZX05026-001)
盛磊祥(1981-),男,山东招远人,现从事深水钻完井、智能完井方面的研究,E-mail:shenglx@cnooc.com.cn。