一种枕形袋高速理袋机构的研究
2012-12-07张有良王剑峰李静宇
张有良, 王剑峰, 吴 琦, 陈 毅, 李静宇
(轻工业西安机械设计研究院,陕西西安 710086)
一种枕形袋高速理袋机构的研究
张有良, 王剑峰, 吴 琦, 陈 毅, 李静宇
(轻工业西安机械设计研究院,陕西西安 710086)
枕形袋打包与装箱的关键是对枕形袋有规律地排列,通过对枕形袋排列的工艺特性和枕形袋物理特性分析,设计出伸缩理袋机构.全面分析了主传送带、皮带纠偏、伸缩导向、伸缩驱动等重要机构的组成与原理,通过枕形袋整理过程中传送带线速度与驱动传送带伸缩的线速度的关系分析,计算出伸缩传送皮带线速度和驱动传送带伸缩线速度的相关参数.
枕形袋;理袋机构;伸缩带;伺服电机
枕型袋包装广泛应用于方便食品、日用化工、调味品、医药、农药等行业,可以包装液体、小颗粒和粉状物质,是物体流通的一种大众化包装形式,也是人们易于接受的包装形式之一.主要特点是包装范围广,易于实现包装,方便物流运输.枕型包装技术趋于成熟,向着高产量大型化方向发展.包装速度越高,产量越大,后续的装箱设备越显得重要,靠人工装箱已经不能满足包装生产的需要,特别是带有毒性的包装物品危害着工人的健康.在装箱、打包之前,枕形袋需要有规律的排列,研究一种高速枕形袋有规律排列的理袋机构,是解决枕型袋的自动装箱或打包的关键技术[1-2].
1 枕形袋理袋排列机的组成与作用
1.1 枕形袋理袋排列机的组成
枕形袋理袋排列机主要由主传送带总成1、皮带支撑组件2、皮带纠偏机构3、机架总成4、伸缩驱动系统5、伸缩导向机构6、检测限位开关7、皮带张紧机构 8、伸缩部件 9 等组成,如图 1[3-5].

图1 枕形袋理袋排列机构组成示意Fig.1 Sketch of composition of arrangement mechanism of finishing material of pincushion bag
1.2 枕形袋理袋排列机的功能与工艺
在枕形袋包装生产线上,枕形袋包装机将物品(液体、小颗粒、粉状等)包装在枕形袋中,通过多个传送带差速输送,包装袋与包装袋之间拉开一定的距离,输送到枕形袋理袋排列机的输送皮带上,将包装袋整齐地排列成一组(横向或竖向),铺平或者搭边重叠,供给下一个工序打包或装箱(见图2).图2a为枕形袋横向排列,图2b为枕形袋竖向排列,图2c枕形袋竖向双排排列,完成枕形袋有规律的排列工艺过程[6-7].

图2 枕形袋理袋排列示意Fig.2 Finishing material arrangement hinting of pincushion bag
排列工艺过程是伸缩带首先移到最远端,检测到一个袋子,向后退一个袋长的距离,直到最后一个袋子放好,再快速前移到最远端,重复上述动作,继续进行袋子的排列.如果进行多列排列时,推袋机构将排列好的袋子移动一个排列工位.
1.3 电气控制系统方案
电气控制系统方案如图3,G1(PLC)为核心控制器,G2为人机操作界面,通过 Modbus总线的RS485与G1相连,伺服电机驱动器A1和变频器A2通过CANopen总线与G1相连,分别驱动控制伸缩移动驱动伺服电机M2,皮带输送电机M1.控制开关、检测开关接在G1的DI口上,指示灯、电磁阀等控制连接在G1的DO口上.

图3 电气控制系统方案Fig.3 Scheme of electrical control system
2 主要机构的设计探讨
2.1 主传送带机构
主传送带主要由移动导向轮1、皮带张紧轮2、移动驱动轮3、皮带4、皮带支撑组件5、固定导向轮6、减速机7等组成,如图4.
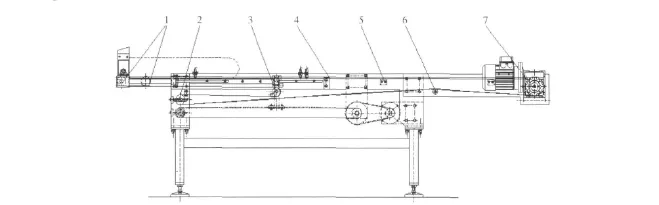
图4 主传送带机构组成示意Fig.4 Hinting of main conveyor belt mechanism composition
移动导向轮1是主传送带的被动轮,随着伸缩机构向前移动或者向后移动,将待整理的包装袋放入合适的位置.皮带张紧轮2是对主传送带进行张紧的过渡轮.皮带支撑组件5、固定导向轮6、减速机7等均是保障主传送带平稳传送的部件.
主输送带的主要技术参数包括:驱动轮直径D1,减速机减速比K1,驱动电机转速N1,皮带线速度V1根据圆的周长乘以转速计算(见式1).

从式(1)可以看出,皮带的线速度V1取决于驱动轮直径D1和减速机减速比K1两个主要参数,V1的大小表明了枕形袋的传输速度.
2.2 皮带纠偏机构
皮带的薄厚不均匀、两边的松紧度不同,安装过程中主动辊与被动辊平行度等诸多因素,都会导致皮带在运行中跑偏.为了防止皮带跑偏,依靠纠偏机构对上述因素进行纠正、补偿等手段,来达到纠偏的目的.
皮带纠偏机构主要由传送带支架1、2个张紧导向轮2、上方皮带3、2组对称的调节机构4、张紧轮5、支撑板6等组成,如图5.调节机构的原理是螺杆固定在张紧轮上,利用螺母调节螺杆,改变张紧轮的位置,平衡皮带两边的张力,起到纠偏的作用[4].

图5 纠偏机构示意Fig.5 Hinting of belt rectification mechanism
2.3 伸缩导向机构
伸缩导向机构对主传送带在伸缩过程中进行导向,主要由伸缩移动前棍1、2个导向光轴2、皮带3、2个线性滑动轴承4、2组导向轨道机构5、伸缩移动后辊6、2组驱动移动连接机构7、2组机械限位块8、检测限位开关9等组成,如图6.

图6 伸缩导向机构示意Fig.6 Hinting of scalability oriented mechanism
2个平行的导向光轴2固定着前后移动辊1,连接在伸缩驱动机构上,导向光轴2安装在线性轴承4上,通过导向轨道5进行导向,在伸缩驱动机构的驱动下前后移动,皮带进行伸缩前后移动.皮带上的枕形袋随着皮带的伸缩传送到适当的位置,将枕形袋有规律地排列到理袋工位上,达到打包或装箱的要求.
2.4 伸缩驱动机构
2.4.1 主要组成
伸缩驱动机构是为主输送带伸缩设计的驱动机构,主要由驱动电机安装架1、驱动伺服电机和一级驱动轮2、2个二级驱动轮3、2组同步齿形带(驱动)4、2组伸缩连接机构5、2个驱动被动轮7等组成,如图7.伺服电机驱动一级同步驱动轮2,通过同步齿形带驱动二级驱动轮3,进行减速,增加扭矩,驱动着连接伸缩轴6的同步齿形带4,实现主传送带8的双向伸缩.

图7 伸缩驱动机构示意Fig.7 Hinting of scalability driving mechanism
2.4.2 主要技术参数
伺服电机(驱动)转速 N2(额定为 3 000 r/min),额定转矩7.9 Nm,一二级驱动轮减速比K2(常数),主驱动轮次数N3(常数),节距H(常数).计算出伸缩移动线速度V2,见式(2),伸缩移动速度影响枕形袋排列,速度低于一定程度,伸缩到位时间大于枕形袋到位时间,排列的袋子就会重叠,影响理袋效果.

除伺服电机转速外,其它参数是一个常数,根据式(2),伸缩移动的线速度取决于伺服电机的转速,在额定转速范围内,伺服电机的转矩变化很小,因此伸缩移动的线速度调整范围很宽.
3 运动关系的设计计算
3.1 枕形袋与整理参数
枕形袋袋宽a,单排整理数量n,最大伸缩量L.

一般情况下,袋子整理排列时要有一部分搭边重叠,因此实际伸缩量比L小一些.
3.2 相关参数计算
枕形袋包装机一般的包装速度是一个定数,设包装周期为T,袋子与袋子在伸缩带上传送的间距为S.

伸缩带从最近端移到最远端距离(最大伸缩量)L,伸缩需要的时间t(假设启停加速时间忽略不计)为:

由式(5)得,V2=L/t(t<T) >L/T=an/T,伸缩带有足够的时间移动到位,才能保证袋子在整理的过程中不重叠.另一方面,保证袋子不重叠还必须保证S≥L,由式(4)得出V1=S/T≥L/T=an/T.在实际设计中,考虑伺服电机的启停加速时间等因素,经验数据是S=2L比较可靠,V1=2an/T比较合适.
4 结束语
从以上论述可以看出,枕形袋理袋机是一个多因素、多机构、典型的光机电一体化设备,在设计的过程中要考虑多个因素.首先要考虑整理的包装机的包装能力,其次要考虑包装袋的宽度,每组整理的数量等因素.只有根据这3个重要因素,对皮带输送机构设计,伸缩驱动机构的设计才有理论根据,伺服电机、减速机、驱动滚轮直径等参数的设计才能满足袋子传送间距等于或者大于2倍的最大伸缩量.
[1]张有良.枕型袋自动装箱机的特点和电气控制[J].食品与包装机械,2004,22(5):16-27.
[2]赵蕾,汤晓华,刘娜,等.袋装食盐生产线装箱机头直线电机运动控制研究[J].北京工商大学学报:自然科学版,2010,28(6):46-52.
[3]张有良,苟向民,王剑峰,等.可编程多功能装箱机的设计和电气控制[J].食品与包装机械,2009,27(4):1-3.
[4]李美川,张国安,苟向民,等.短距离平皮带传输跑偏问题的分析[J].食品与包装机械,2009,27(6):8-11.
[5]董秀萍,黄明吉.豆腐皮加工设备整机改进及定量灌装机构设计[J].北京工商大学学报:自然科学版,2010,28(3):64-67.
[6]张有良,王剑峰,李美川.干包生产线理瓶输送和瓶子分组的研究[J].酒·饮料技术装备,2009(5):60-62.
[7]张有良,王剑峰,张国安.啤酒干包生产线箱子码垛的工艺研究[J].酒·饮料技术装备,2010(2):58-60.
(责任编辑:檀彩莲)
Study on High-speed Finishing Bag Mechanism of a Kind of Pincushion Bag
ZHANG You-liang, WANG Jian-feng, WU Qi, CHEN Yi, LI Jing-yu
(Light Industrial Xi'an Mechanic Design Research Institute,Xi’an 710086,China)
The key of packaging and packing was the regular arrangement of the pincushion bag.According to to analysis of the physical characteristics and the craft characteristics of the regular arrangement of the pincushion bag,the scalability finishing bag mechanism was designed,The composition and principle of several main mechanisms was analysed comprehensively,such as the key conveyor belt,belt rectification,scalability orientation,scalability driving,etc.According to analysis of the linear velocity of the conveyor belt and the driving conveyor belt scalability when working,the related parameters of the linear velocity of the scalability conveyor belt and the driving conveyor belt scalability was calculated.
pincushion bag;finishing bag mechanism;telescopic belt;servo motor
TS206.5
A
1671-1513(2012)04-0071-04
2012-05-14
张有良,男,教授级高级工程师,主要从事食品、饮料、乳品、包装机械等方面的电气设计及研究工作.
