电容式倾角传感器在底盘悬挂系统中的应用
2012-12-07隋洪江
隋洪江,周 滨
(中国人民解放军驻一二二厂军事代表室,黑龙江哈尔滨150066)
0 引言
随着电子技术的发展和应用,汽车的安全性、舒适性和智能性越来越高,汽车倾角传感器的应用是控制汽车行驶车速和车姿的一种有效的方法,是提高汽车安全性的重要措施[1]。通常使用磁阻式角度传感器进行测量,虽然能实现非接触的精确角度测量,达到使用要求[2],但是,该角度传感器不方便安装,且不便于整机校准。本文提出的电容式倾角传感器应用在底盘悬挂系统中,便于安装,能实现整机自动校准,且具有系统响应时间快、精度高、性能稳定等优点。
1 系统方案
系统分为信号检测部分和控制部分,其中信号检测部分包括:角度测量模块和光电检测模块[3];控制部分包括:控制器模块、电机驱动模块、液晶显示模块和声光指示模块。车辆的基本模块方框图如图1所示。

图1 车辆的基本模块方框图Fig 1 Basic module block diagram of vehicle
2 理论分析与计算
2.1 倾角传感器原理
所谓倾角传感器,其理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。如果初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移。所以,它其实是运用惯性原理的一种加速度传感器。简言之,倾角传感器就是可以用来测量相对于水平面的倾角变化量[4]。
2.2 杠杆平衡计算
根据杠杆平衡原理对跷跷板左右两端进行受力分析,得出支点C两端力矩必须相等,即


图2 跷跷板系统受力分析图Fig 2 Force analysis diagram of seesaw system
若车辆质量为1200 kg,跷跷板长为1.6 m,平衡时允许的最大角偏为1.4°(arcsin(4/160)),配重1可以在离A点20~40 cm的范围内移动。假设配重1和车辆所受到的重力分别为G1,G2,它们到支点C的垂直距离分别为L1,L2;根据公式(1),推出:G1×L1=G2×L2。
配重1最大重量

设比例系数K=G1/G2,则K≤4,推出

当K值无限接近0时,推出L2也趋近于0,所以,车辆可以达到自校准效果。
2.3 角度转换计算
倾角传感器是双轴加速度传感器,可以测动态、静态加速度,从而转换成物体的倾斜角度,转换公式如下

式中 X0为x轴的加速度原始数据,X1为x轴角度零点的加速度原始值,X2为x轴的灵敏度,即x轴单位加速度的值。
2.4 控制方法分析
车辆控制软件采用模块化的程序结构,它包括一个主体循环程序、增量式PID速度控制程序、中断服务程序、寻线控制算法程序和速度控制算法程序等。软件控制算法如图3所示。首先对各种设备进行初始化,然后选择进入参数修改程序。参数设定完毕后打开中断,最后循环执行位置速度控制程序,实现变速。
本系统采用增量式数字PID控制算法,通过PWM脉冲对步进电机进行调速。增量式数字PID调节的数学表达式如下
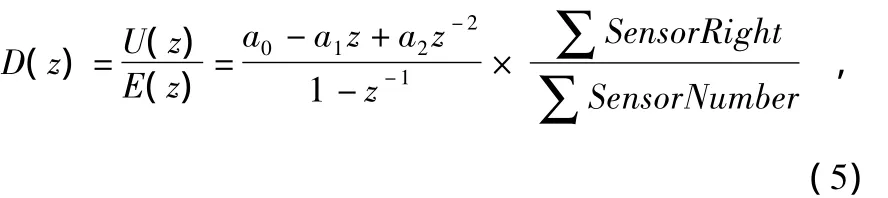
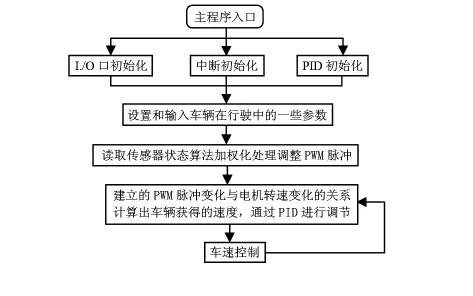
图3 软件控制算法流程图Fig 3 Flow chart of software control algorithm

A=KP,B=KP/Ti,C=KP·TD/T,从而确定倾斜角度与车辆姿态之间的关系。
3 系统电路与程序设计
系统电路包括单片机最小系统模块、光电检测模块和角度测量模块。
3.1 检测电路设计
3.1.1 光电检测电路设计
为了让车辆能在跷跷板上按既定方向的运动,采用黑线来引导车辆前进。利用ST198反射式红外光电传感器对黑线进行检测,光电检测电路图如图4所示。
图中通过光敏三极管Q1和R50分压产生一个2 V左右的电压基准,送LM339的同相端。当遇到黑线时,U1接收端没有接收到发射管反射回来的信号,故在U1的2脚输出低电平,送LM339反相端进行电压比较,LM339输出高电平,经过施密特触发器整形成标准的TTL电平,送单片机的P0口。

图4 光电检测电路原理图Fig 4 Principle diagram of photoelectric detecting circuit
3.1.2 角度测量模块电路设计
如图5所示,倾角传感器是利用重力加速度对加速度传感器的影响来测量物体倾角,当加速度传感器的敏感轴与重力加速度垂直时,传感器对倾角十分敏感,精度达到0.1°。传感器模块内部单片机P89LPC932将传感器测量到的实时加速度模拟信号经内部A/D转换、计算,变成表示成角度的数字信号,再通过单片机之间串口将数据传送给P89V51RD2FN。

图5 角度测量模块原理图Fig 5 Principle diagram of angle measurement module
3.2 程序设计
1)软件的主要功能是为车辆的整个运动过程建立一个数学的分段控制,配合增量式数字PID控制算法[5],根据角度传感器反馈的信号和光电检测到的信号,实现车辆速度和位置的自动调节,确保跷跷板在最短时间内达到平衡。
2)对多只光电传感器状态进行采集,并经过反复考量而确定的各个传感器的安装位置,提高了测量精度,确保车辆在跷跷板上行驶时更加平稳和精确。
3)程序设计采用C51语言编写,有利于程序的调用和执行,提高了程序的可靠性。
主程序具体处理流程图见图6。
4 实验测试
4.1 测量方法
将车辆至于角度测试台上,分别制造0°~50°的单向倾斜角和 x向为0°~5°,y 向为0°~50°的双向倾斜角,对平衡误差进行测量。
4.2 测试结果
基本测量结果比对见表1。
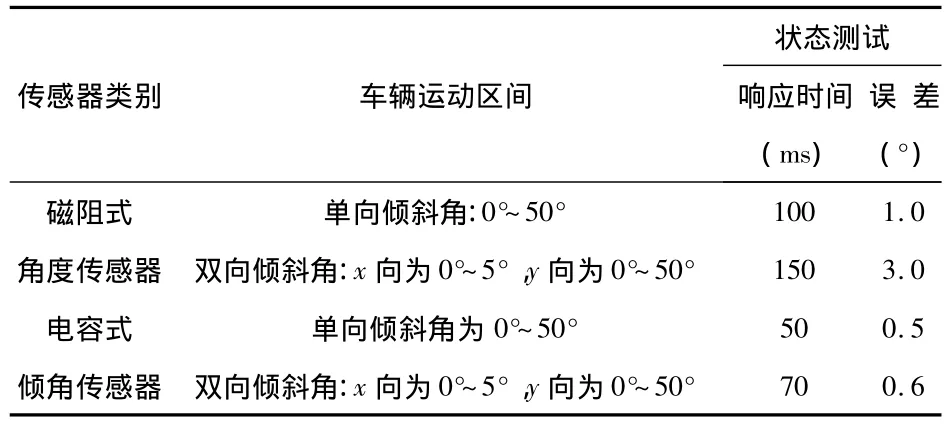
表1 测试结果Tab 1 Test result
与传统的采用磁阻式角度传感器的车姿测试系统相比,现在的测试系统响应时间单向倾斜角达到50 ms,双向倾斜角达到70 ms;误差单向倾斜角达到0.5°,双向倾斜角达到 0.6°。

图6 主程序流程图Fig 6 Flow chart of main program
5 结束语
系统利用P89V51RD2FN单片机为控制核心,采用电容式倾角传感器实时测量车辆底盘的倾斜角,并用光电传感器检测车辆最终运动姿态和车速。光电传感器和倾角传感器将实时测量信号馈送至单片机,并采用增量式PID控制算法确保车辆能够达到平衡。利用CANBUS 2.0将数据传输至车载电脑来达到智能化车姿控制。实验结果表明:系统响应时间快,精度高,性能稳定。
[1]杨晓波.汽车侧向倾斜角度传感器的应用初探[J].汽车电器,2002(1):6-10.
[2]梁长根.磁阻式传感器在角度测量中的应用[J].传感器技术,2004,23(4):79-81.
[3]Zhao Yang,Mao Minyao,Horowitz R,et al.Optomechanical uncooled infrared imaging system:Design,microfabrication,and performance[J].Journal of Micro-Electro-Mechanical Systems,2002,11(2):136-146.
[4]陈 超,续志军.电容式倾角传感器的研究与应用[J].微计算机信息,2009(16):13-16.
[5]马忠梅,籍顺心,张 凯,等.单片机的C语言应用程序设计[M].北京:北京航空航天大学出版社,2003.
