自适应磁流变悬架半主动控制研究
2012-12-03蒋学争胡红生宋宏伟
蒋学争 胡红生,2 宋宏伟 王 炅
1.南京理工大学,南京,210094 2.嘉兴学院,嘉兴,314001
0 引言
磁流变液是一种在外加磁场作用下其黏性、塑性等流变特性会发生急剧变化的智能材料,其基本特征是在外加磁场作用下能瞬间(毫秒级)从自由流动的液体转变为半固体,呈现可控的屈服强度,而且这种变化是可逆的。磁流变减振器是以磁流变液为工作介质的半主动振动控制结构,具有结构简单、响应速度快、阻尼力连续顺逆可调以及方便与计算机控制结合等优点[1],因此广泛应用于结构振动半主动控制领域[2-4]。特别是在汽车振动控制领域,以磁流变减振器为执行元件的磁流变半主动悬架系统已经成为提高汽车舒适性和安全性的研究热点[5-8],并且已经有成品开始装备到高级轿车上[9]。目前研究的磁流变半主动悬架系统需要一套电源设备来给磁流变减振器活塞线圈提供电流,同时还需要一套控制系统,以便能够根据路面激励和悬架响应来实时地调节输入电流的大小,从而保证磁流变减振器能够根据外界振动条件的变化适时地改变磁流变减振器输出阻尼力[10],以实现对汽车悬架振动的智能控制。然而在实际应用过程中,外加的电源和控制设备会使整个控制系统的体积增大,重量增加,从而大大降低系统的可靠性,同时也会增加应用成本,从而制约磁流变半主动悬架技术的进一步发展。针对此问题,本文提出了一种无需外部电源和控制设备的新型磁流变减振器。
1 新型磁流变减振器
1.1 结构设计
本文所设计的无需外部电源和控制设备的新型磁流变减振器包括电磁感应能量捕获结构和电能调理模块,能够将外界振动能转换成适合磁流变阻尼器使用的稳压直流电,并且收集电能的大小与外界振动强弱成正比关系,从而可以在无外电流输入的情况下根据振动情况实时地改变减振器输出阻尼力,实现对振动的自适应智能控制,其结构如图1所示。它主要由磁流变减振器结构、电磁感应能量捕获结构、电能调理模块以及相关连接件和密封件构成。其中,电磁感应能量捕获结构的定子与磁流变减振器的缸筒连接在一起,在定子凹槽内缠绕着电磁线圈,永磁体构成收集电能的动子。实际工作时,在外界环境振动作用下,减振器的活塞杆在缸筒内做上下往复运动。由于电磁感应能量捕获结构的永磁体动子通过中间连接杆和减振器的活塞连接在一起,因此在振动力作用下,永磁体将随着减振器活塞杆一起运动,在定子腔内做往复运动。由法拉第电磁感应定律可知,这将引起定子上缠绕的电磁线圈内部的磁通量发生变化,产生感应电动势。电能调理模块将产生的感应电动势转换成适合磁流变减振器使用的稳压直流电,作用到磁流变减振器的活塞线圈上,产生控制磁流变液的磁场。同时施加到活塞线圈上的电能与外界振动强弱成正比关系,从而可以在外界振动较强时输出较大的阻尼力,增强振动控制能力,实现对振动的自适应控制。
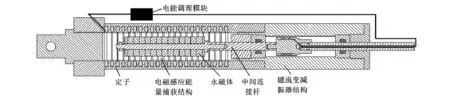
图1 新型磁流变减振器结构简图
在结构设计过程中,采取了一系列措施来提高永磁体磁场利用率和电能收集效率,以便能够捕获足够的供磁流变减振器使用的电能,具体措施有:①连接固定永磁体的连接杆使用不导磁的材料铝制成,这样可以迫使磁力线向四周发散通过定子形成闭合回路,避免磁力线通过连接杆形成闭合回路,减少磁力线的泄漏;②铝杆上相邻永磁体的磁极化方向相反,同时永磁体之间设置一个由高磁导率材料制成的磁极,从而在其同极结合处,两组磁力线因同极相斥而被密集压缩并正交垂直地穿过空气隙,这就可以大大地减小磁力线实际穿过的空气隙厚度,从而增强发电磁场强度,提高产生感应电动势的值;③电磁感应能量捕获结构的定子内部采用T形齿结构,可以有效地增大磁力线与定子的接触面积,从而使更多的磁力线穿过空气隙和定子形成闭合回路,增加发电量,提高发电效率。
1.2 电能收集理论建模
在振动环境作用下,电磁感应能量捕获结构的永磁体动子在减振器活塞杆带动下在定子内做往复运动,绕制在定子上的电磁线圈切割磁感应线产生电能,将一部分振动能转换成电能。其内部结构如图2所示,主要包括定子、永磁体、磁极、电磁线圈等。定子内部采用T形齿结构,并且在相邻T形齿的凹槽内绕制有电磁线圈,这样可以最大化地穿过磁力线,从而提高永磁体磁场的利用率,增加收集的电能。铝杆将圆环形永磁体和磁极连接在一起构成电磁感应能量捕获结构的动子,永磁体的磁极化方向为其轴向方向,并且相邻永磁体的极化方向相反。实际实验器件加工时,永磁体采用NdFeB35制成;定子和磁极用电磁纯铁DT4制成,因为DT4的磁导率高、磁阻低,永磁体产生的磁力线就容易穿过磁极、气隙和定子,形成磁力线回路,提高发电效率。根据磁路原理设计加工的电磁感应能量捕获结构的关键结构参数如表1所示,可见定子内部极靴的占空比为40%,永磁体在定子内往复运动时有1638匝电磁线圈参与切割磁感应线进行发电。
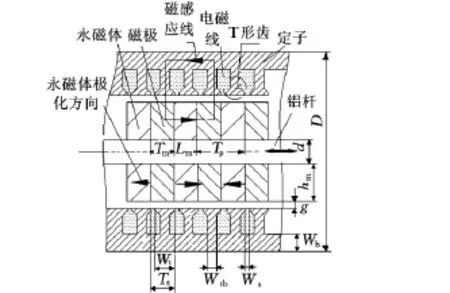
图2 电磁感应能量捕获内部结构
当永磁体在定子内往复运动时,针对其中一个电磁线圈,其等效磁路模型如图3所示,其中,Frem为永磁体的剩余磁动势;Rm为永磁体自身的磁阻;Rm′为铝杆引起的磁漏;Rp为磁极的磁阻;Rg为气隙的磁阻;Rc为定子的磁阻。实际加工时定子和磁极用高导磁材料电磁纯铁DT4制成,磁阻非常小,所以Rp和Rc可以忽略不计。同时因为材料铝不导磁,所以铝杆引起的磁漏非常小,Rm′也可以忽略不计。由法拉第电磁感应定律可知,产生的感应电动势为线圈内磁通的变化率。所以在外界振动作用下,电磁感应能量捕获结构产生的电动势为

表1 能量捕获结构关键参数
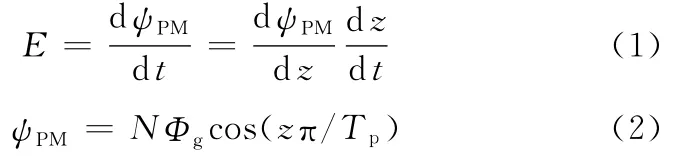
式中,ψPM为永磁体的磁链;z为外界振动引起的永磁体动子与定子间的相对位移;t为运动时间;N 为电磁线圈的匝数;Φg为定子和永磁体之间气隙的磁通量。

图3 等效磁路模型
同时由磁路原理[11]可知,定子和永磁体之间的气隙磁通量可用下式计算:

式中,μ0为真空磁导率;Brem为永磁体的剩余磁通密度;Hc为永磁体的磁矫顽力;Ag为气隙的截面积;Am为圆环形永磁体的截面积。
化简式(1)和式(2)可得这个线圈切割磁感应线产生的感应电动势为

1.3 电能调理电路
由式(4)可知,定子内电磁线圈产生的电动势不是一个定值,其大小与振动强弱成正比,方向随着振动方向的变化不断变化。图4为永磁体在外界振动力作用下,沿着其轴线在定子内部做振幅为10mm、频率f分别为1.59Hz和4.77Hz的正弦运动时收集的感应电动势与时间的关系图。由图4可知,在外界振动作用下,电磁感应能量捕获结构收集的电动势是大小和方向不断变化的交流电压,而磁流变减振器工作时需要向活塞线圈中输入固定直流电流来产生控制磁流变液的电磁场,所以收集的感应电动势不能直接被磁流变减振器使用。因此,需要一个电能调理模块将电磁感应能量捕获结构产生的交流电转换成适合磁流变减振器使用的稳压直流电。

图4 感应电动势与时间关系
为了将电磁感应能量捕获结构收集的交流电转换成适合磁流变减振器使用的直流电,依照电磁感应能量捕获结构的相关结构参数而设计的调理电路如图5所示。该调理电路由一个直流整流电路和一个存储电容C1组成,直流整流电路用来将方向不断变化的感应电动势转换成方向不变的直流电压,存储电容用来存储从直流整流电路输出的电能,并通过电容充放电功能将其转换成适合磁流变阻尼器使用的稳压直流电。为了验证调理电路的有效性,在电路仿真软件PSPICE中对设计的调理电路进行仿真研究,如图5所示,其中,电压输入V1与时间的关系如图4所示。图5中,R1表示绕制在定子内电磁线圈的电阻值(28.26Ω);R2表示磁流变阻尼器活塞线圈的电阻值(1.26Ω)。在交流电压源V1的激励下,经过电能调理电路,R2两端的电压与时间关系如图6所示。
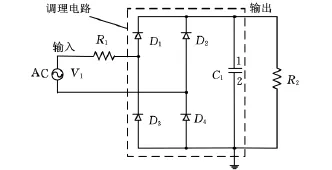
图5 电磁感应能量捕获调理电路

图6 调理电路输出电压与时间关系
图6a所示为f=1.59Hz振动条件下,经过电能调理电路之后施加到R2两端的电压U2(即施加到磁流变减振器两端的电压)与时间的关系曲线,电压经过约3s的上升时间后,从第3s开始在固定值1.0V上下波动,并且波动的幅度较小,约为0.025V,这种波动是由存储电容C1的充放电引起的。图6b所示为f=4.77Hz振动条件下,R2两端的电压U2与时间的关系曲线,同样,电压在3s内从0上升到固定值3V,并在3V上下波动,此时电压波动幅度比f=1.59Hz振动作用时小得多,基本上稳定在3V。由于电压波动比较小,可以忽略不计,因此在振幅为10mm、频率f分别为1.59Hz和4.77Hz的振动作用下产生的感应电动势经过电能调理电路转换之后,可以分别在磁流变减振器活塞线圈中产生0.7A和2.3A左右的直流电。由此可以说明:本文设计的电能调理电路可以将电磁感应能量捕获结构收集的交流电压转换成适合磁流变阻尼器使用的稳压直流电压。
图7所示为振幅为10mm,不同振动频率下,经电能调理电路之后R2两端的电压U2与时间的关系关系。由图7可见,在相同振幅下,振动频率越大,R2两端的电压越大,施加到磁流变减振器两端的电流越大,减振器输出阻尼力越大。由此可以说明:本文设计的新型磁流变减振器可以根据外界振动强弱实时地调整输出阻尼力,实现对振动的自适应智能控制。

图7 不同振动频率下R2两端的电压
2 自适应磁流变悬架系统
针对汽车悬架振动控制,利用本文设计的新型磁流变减振器可以构建无需外部电源和控制设备的汽车自适应磁流变悬架半主动控制系统,如图8所示。

图8 自适应磁流变半主动悬架1/4模型
根据图8所示的模型,可以建立以下动力学方程:

式中,Fm、Ce分别为磁流变减振器的可调库仑阻尼力和黏性阻尼系数;ks、ku分别为悬架弹簧刚度和轮胎刚度;ms、mu分别为簧载质量和非簧载质量;xr、xu、xs分别为路面位移、非簧载质量位移和簧载质量位移。
针对设计的新型磁流变减振器结构特点,根据磁流变减振器阻尼力相关公式[12],其库仑阻尼力和黏性阻尼系数分别可用下式计算:
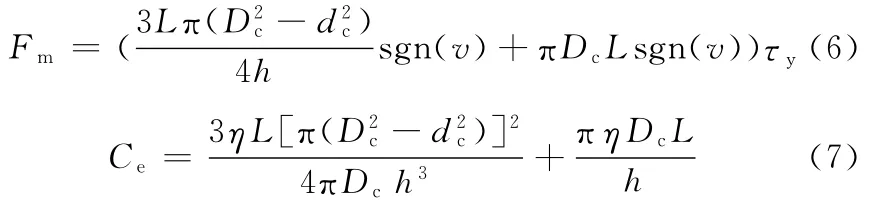
式中,Dc、dc分别为磁流变减振器活塞和活塞杆直径;L为磁流变减振器的有效通道长度;η为磁流变液的零场黏度;h为阻尼通道间隙厚度;v为磁流变减振器活塞杆的运动速度;τy为磁流变液的剪切屈服应力。
由式(6)可知,磁流变减振器的库仑阻尼力Fm与磁流变液的剪切屈服应力τy成正比,所以通过控制输入到减振器活塞线圈上的电流可以实时地控制磁流变液的剪切屈服应力τy,从而控制减振器输出不同的阻尼力,实现对汽车悬架的智能控制。由上文分析可知(图7),外界振动越强,电磁感应能量捕获结构收集的电能越多,施加到磁流变减振器活塞线圈上的电压越大,输出的阻尼力也就越大,所以本文设计的自适应磁流变减振器可以根据外界振动的强弱来“自行”控制输出阻尼力的大小,在无需外界控制设备的条件下实现对汽车悬架的智能控制。因此,本文构建的自适应磁流变悬架系统的控制策略是:依靠新型磁流变减振器自身对外界振动强弱的“感知”能力自行调节输出振动控制力,当汽车悬架振动较强时,减振器输出较大的阻尼力以消耗更多的振动能,提高汽车操作稳定性;而当振动较弱时,减振器输出较小的阻尼力以提供更好的乘坐舒适性,并且无需外界电源设备,从而实现对汽车悬架系统的自适应控制。
3 实验
为了验证汽车自适应磁流变悬架半主动控制系统对振动的控制效果,在博仕乐液压机械有限公司加工了新型磁流变减振器试件,并且在加工过程中将减振器和汽车弹簧集成在一起,以便能够更快捷有效地搭建悬架半主动控制系统。首先测试设计加工的新型磁流变减振器的自身阻尼特性,测试过程中将电磁感应能量捕获结构和磁流变减振器断开,向减振器线圈中施加大小不同的固定电流,其阻尼力曲线如图9所示。由图9可见,随着外界输入电流从0逐渐增大到1.6A,磁流变减振器输出阻尼力峰值也由200N逐渐增大到1600N左右,这表明所设计的磁流变减振器可以达到预先设定的振动控制目标,可以通过控制输入电流来控制其对外输出不同的阻尼力。
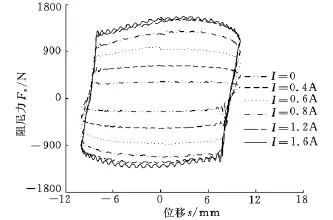
图9 不同电流激励下的阻尼力
同时测试振幅为10mm,不同振动频率的正弦激励下电磁感应能量捕获结构收集的电能,并与理论仿真结果进行对比,以验证新型磁流变减振器的电能捕获能力,对比结果如图10所示。由图10可见,随着振动频率的增大,电磁感应能量捕获结构收集的电压也逐渐增大,这表明外界振动越强,收集的电能越多,施加到磁流变减振器上的电流也就越大,从而输出更大的阻尼力来控制振动,即减振器输出阻尼力受外界振动强弱的控制。同时对比图10中实验所得曲线和仿真曲线可见,在相同振动条件下,实验测得的曲线在仿真曲线之下,实际所获电能比理论值略小,其能量捕获效率约为58%。经分析,这是由于仿真过程中忽略了实际工作时永磁体向外界环境磁场泄漏,同时绕制在定子凹槽里面的线圈绕组的电阻值也比理论值稍大,以及测量误差等原因,并不影响理论设计计算的正确性。
在实验验证了磁流变减振器自身特性以及电磁感应能量捕获结构正确可行的情况下,在PA-20-Z型电液伺服汽车悬架实验系统(长春科新实验仪器有限公司生产)上对构建的自适应磁流变1/4悬架系统进行了实验研究,测试振动作用下悬架系统的振动响应,验证搭建的汽车自适应磁流变悬架对振动的控制能力。实际搭建的实验系统如图11所示,自适应磁流变减振器和弹簧集成在一起,减振器上端连接模拟汽车簧载质量的质量块,下端连接在模拟汽车非簧载质量的质量块上,非簧载质量块通过底端弹簧连接在实验台架激振头上,底端弹簧用来模拟汽车轮胎。实验时,工控机控制台架激振头产生振动,并通过模拟轮胎的底端弹簧带动非簧载质量块、磁流变减振器集成和簧载质量块沿着导轨上下往复运动,模拟汽车实际行驶时悬架的振动,并通过测量簧载质量的加速度来衡量悬架系统的振动响应。为了保证实验数据采集和处理的准确性,加速度传感器选用德国Kistler公司的8932型单向压阻式加速度传感器,数据采集硬件选用美国国家仪器(NI)有限公司的PXI-4472B振动采集系统。

图11 实验系统
实验时测量两种情况下的悬架响应:第一种是OFF状态,即电磁感应能量捕获结构与磁流变减振器不连接,在此条件下没有电流输入到磁流变减振器活塞中,磁流变减振器相当于一个常规液压减振器,靠自身的黏性阻尼力控制悬架振动,此时悬架系统相当于目前汽车上通常配备的被动液压悬架系统;第二种是ON状态,此时电磁感应能量捕获结构与磁流变减振器连接,其收集的电能施加到磁流变减振器上,产生控制磁流变液的电磁场,控制磁流变减振器输出不同的阻尼力。同时因为收集的电能与外界振动强弱成正比关系,悬架系统能够根据外界振动激励的强弱实时地改变输出阻尼力,实现对汽车悬架的自适应振动控制。
实验过程中,实验系统工控机中输入路谱振动数据,控制激振头产生相当于汽车以72km/h的车速行驶在路谱D级路面上时悬架所受的振动激励,利用PXI-4472B数据采集系统分别采集上述两种条件下的簧载质量加速度,并进行加速度时域和频域分析,处理后的实验数据结果如图12、图13所示。由图12、图13可知,在路谱波振动作用下,与被动悬架系统相比,自适应磁流变半悬架半主动控制系统有效地减小了汽车悬架簧载质量的垂直振动加速度,使悬架簧载质量的垂直振动降低了30%左右,改善了汽车行驶的平顺性及乘坐的舒适性,并具有良好的鲁棒性。实验结果表明,自适应磁流变悬架系统可以很好地控制车辆悬架振动,说明利用本文设计的新型磁流变减振器构建的自适应磁流变半主动悬架是可行的。
4 结论
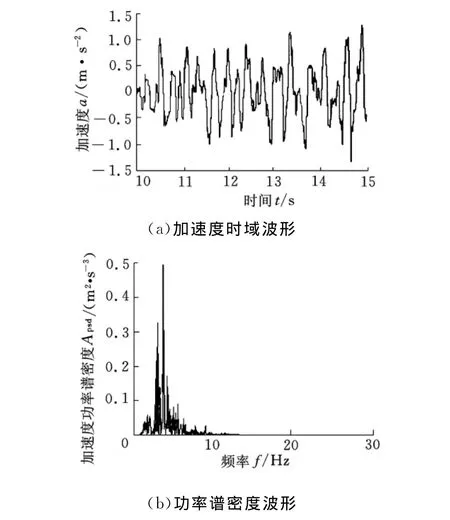
图12 被动悬架响应实验结果
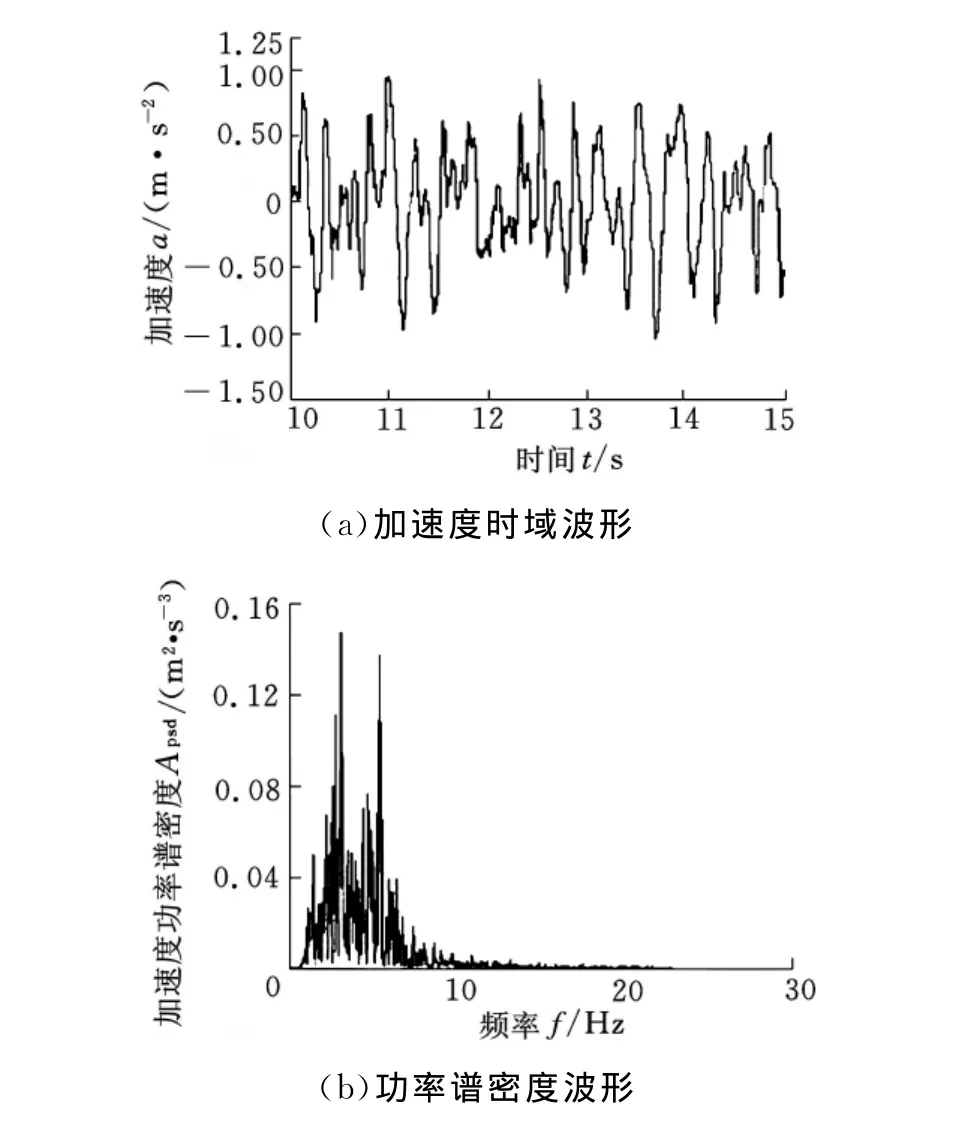
图13 自适应磁流变半主动悬架响应实验结果
本文设计了一种新型磁流变减振器,可以在无需外部电源和控制设备的情况下实现对振动的自适应控制。建立了其电能收集的理论模型和电能调整电路,进行了仿真分析,结果表明,在不同的振动条件下,新型磁流变减振器可以根据外界振动强弱程度输出不同阻尼力,实现了对振动的自适应控制。利用新型磁流变减振器构建了无需外部电源和控制设备的汽车自适应磁流变半主动悬架,并进行了实验研究,实验结果表明:与常规被动液压悬架相比,自适应磁流变半主动悬架明显地抑制了汽车垂直振动,改善了汽车行驶的平顺性,说明利用所设计的新型磁流变减振器对汽车悬架进行自适应控制是可行的。
[1]Boada M,Calvo J A,Boada B L,et al.Modeling of a Magnetorheological Damper by Recursive Lazy Learning[J].Int.J.Non-Linear Mech.,2011,46(3):479-485.
[2]Sevki C,Tahsin E.Modeling and Testing of a Field-controllable Magnetorheological Fluid Damper[J].International Journal of Mechanical Sciences,2010,5(3):1036-1046.
[3]Peter J N,Neild S A,Wagg D J.Quasi-active Suspension Design Using Magnetorheological Dampers[J].Journal of Sound and Vibration,2011,330(10):2201-2219.
[4]Cho S W,Jo J S,Jang J E,et al.A Smart Passive Damping System for Stay Cables[C]//Smart Structures and Materials 2006:Sensors and Smart Structures Technologies for Civil,Mechanical and Aerospace Systems.San Diego,USA:SPIE,2006:1-6.
[5]Ahmadian M,Pare C.A Quarter-car Experimental Analysis of Alterative Semiactive Control Methods[J].Journal of Intelligent Material Systems and Structures,2000,11(3):604-612.
[6]Gordaninejad F,Kelso S P.Fail-safe Magnetorheological Fluid Dampers for Off-highway,High-payload Vehicles[J].Journal of Intelligent Material Systems and Structures,2000,11(5):395-406.
[7]Potter J N,Neild S A,Wagg D J.Quasi-active Suspension Design Using Magnetorheological Dampers[J].Journal of Sound and Vibraion,2011,330(4):2201-2219.
[8]李锐,陈伟民,余妙,等.汽车磁流变悬架垂直振动控制与试验研究[J].中国机械工程,2008,19(17):2132-2138.
[9]邹得和.德尔福的新一代MagneRide磁流变阻尼可调减振器[J].汽车与配件,2008,20(9):34-35.
[10]陆正刚,郭慧明.柔性车辆振动和运行平稳性控制研究[J].中国机械工程,2006,17(10):1026-1031.
[11]Bois H D.The Magnetic Circuit in Theory and Practice[M].London:Longmans,1896.
[12]周云,谭平.磁流变阻尼控制理论与技术[M].北京:科学出版社,2007.