双定子-双转子型大力矩超声波电机的研制
2012-12-03王光庆赵忠伟郭吉丰
王光庆 赵忠伟 郭吉丰
1.浙江工商大学,杭州,310018 2.浙江大学,杭州,310027
0 引言
超声波电机(ultrasonic motor,USM)是利用压电晶体的逆压电效应使定子产生强迫振动而形成弯曲振动波,并通过定子、转子接触面的摩擦力驱动转子产生旋转或直线运动的新型驱动器,与电磁型电机相比,超声波电机具有低速大力矩、响应速度快、保持力矩大和结构简单(不需要铁芯和绕组)等优点,被广泛应用于各个领域中。有些应用场合(如管道窗帘、机器人关节等)对电机的结构尺寸和输出性能有很大的限制,要求结构尺寸小但输出力矩很大。目前,传统的单定子-单转子结构形式的行波型超声波电机因输出力矩小、效率低,难以满足上述场合的使用要求。为此,人们试图用普通电机常用的并联驱动的方法解决此矛 盾[1-8],以 色 列 的 Nanomotion 公 司、日 本 的Kurosawa、德国的Mracek等在直线超声波电机应用方面采用了并联驱动技术,取得了一些初步成果。另一种方法是通过连轴器将环形行波型超声波电机输出轴串搭起来,用同一电源或两个电源驱动电机,从而达到增大驱动力矩的目的,其不足之处是安装要求高、驱动复杂,失去了超声波电机结构紧凑的特点。
本文提出采用双定子-双转子结构形式的行波型超声波电机,在保证驱动电源和电机定子直径不变的前提下,仅增加电机的轴向长度,通过调节两个定子的结构尺寸使定子的谐振频率达到一致,用单轴共轴的形式将两电机转子的输出力矩并联输出,以提高电机的输出转矩。
1 电机结构设计
双定子-双转子型大力矩超声波电机结构如图1所示。电机主要结构由两个结构尺寸完全一致的定子1、定子2和转子1、转子2构成。定子1和定子2底部粘结压电陶瓷,两个定子分别通过各自基座上的3个螺钉固定在支撑底座上,转子1和转子2底面粘有摩擦材料,转子内孔开有键槽,转子的径向定位方式采用定位键,在输出轴上与转子1和转子2配合的地方分别加工一个键槽,定位键与键槽紧配合,转子输出力矩通过两个定位键的径向作用传递到输出轴。转子轴向预压力的调节则通过两个调节螺母压缩转子1和转子2的弹簧变形产生预紧力实现。固定螺钉用来锁紧调节螺母与转子,使转子在电机运转过程中不产生轴向松动,保证转子与定子始终接触。
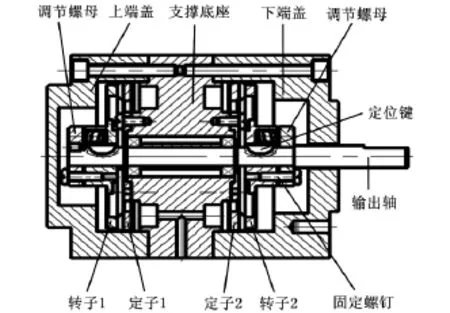
图1 双定子-双转子行波型超声波电机结构图
2 电机定子工作频率的调谐
理想情况下,驱动条件相同时,双定子-双转子电机的输出力矩是单定子-单转子电机输出力矩的两倍,但是由于加工误差的存在、电机材料以及制作工艺存在细微差别,所以很难保证双定子-双转子电机性能完全一致。为了保证两个定子的工作性能一致,特别是定子1和定子2的工作频率的一致性,采用基于结构摄动理论的电机定子结构修改法对新型超声波电机的两个定子的谐振频率进行调谐。根据文献[9-11]的初等结构摄动理论可知,附加质量会引起结构的动能变化,附加刚度会引起结构的势能变化,动能和势能的变化均会引起结构的模态频率发生变化。考虑到增大质量或添加弹簧对于已加工制作好的定子而言不方便,因此本文采用切除定子部分结构的方法,如对定子打孔、切削等方法。假设定子体积为V,密度为ρ,材料的刚度矩阵为C,定子切除部分的体积为V1。若定子的振动位移场、速度场和应变场分别为

式中,Φm为振型矩阵;Φ′m为应变矩阵;η为模态坐标。
那么,考虑切除部分结构后,定子的应变能Esp和动能Esk分别为
由Lagrange方程得到定子结构在修改前和修改后的模态频率ωk和分别为[12]
式中,Φmk为矩阵Φm的第k列;Φ′mk为矩阵Φ′m的第k列。
由振型的加权正交性可将式(7)简化为

式中,Kk、Mk为定子修改前的第k阶模态刚度和模态质量为定子修改后的第k阶模态刚度和模态质量。
由式(8)可知:当Δω>0时,修改后的定子模态频率比原频率降低;当Δω<0时,修改后的定子模态频率比原频率升高。
3 电机样机的加工制作
超声波电机的制作工艺对电机定子的性能一致性有很大的影响,为此,提出采用图2所示的电机制作工艺流程。
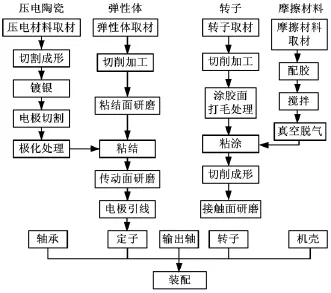
图2 超声波电机的制作工艺流程
(1)压电陶瓷的粘结过程。采用合理的胶粘工艺,有效地控制胶层的厚度和均匀性,是提高胶粘层抗剪切能力的有效措施。本文选用了7-2316单组分环氧胶作为胶粘剂,胶粘工艺及过程如下:①表面处理。主要是除去定子表面的灰尘、油污等污垢。将准备胶粘的定子放入盛有弱碱溶液的超声波清洗机中清洗,然后取出用丙酮反复擦洗,直至定子表面光洁为止。②烘干。洗净后的定子和压电陶瓷放入60℃的真空烘箱烘干。③粘结。在烘干好的定子和压电片底面均匀地涂上一层较薄的底胶,将两者在夹具上装配。④加压固化。给装配好的定子施加均匀压力,以提高胶层的流动性,并将其放入真空烘箱中高温固化3~5h,增加胶粘效果。必须注意的是,在胶粘之前,定子弹性体和压电片的粘结面均须打磨处理。粘结时,在保证不缺胶的前提下,胶层薄些较好,厚度一般控制在20μm以内。
(2)摩擦材料的粘涂过程。将清洗后的转子半成品和称量好的配方材料在60℃下预热处理10min左右,然后取出配方材料进行搅拌混合,直至均匀,再在真空烘箱中除去气泡5min后,将配好的摩擦材料均匀地粘涂到转子上,最后在120℃条件下固化。
(3)装配过程。电机的装配是电机制作的最后环节,也是影响电机性能的主要环节。特别是转子与输出轴的连接,必须保证有较高的垂直度,否则,装配好的转子与定子不能良好地接触配合,会导致接触面压力分布不均匀;轴承要选用精度较高、能承受一定轴向推力的径向轴承,并使得轴承与输出轴之间紧配合装配,防止轴承径向窜动带来的接触面压力分布不均。装配好的电机要进行一段时间的连续运行,使电机内部应力释放、接触面进一步磨合。
4 电机性能测试
为检测研制的双定子-双转子型超声波电机的机械特性,笔者自制了3台原理样机进行实验研究,分别标记为1号电机、2号电机、3号电机。电机样机如图3所示,其中1号电机两个定子的齿槽为平齿槽,即定子内齿高和外齿高均为1.8mm,如图3a所示;2号、3号电机为内斜齿槽结构,如图3b所示,2号电机定子内齿高为2mm,外齿高为1.0mm,3号电机定子内齿高为1.8mm,外齿高为1.0mm,3个电机的其他结构参数和材料参数均相同,具体见表1和表2。
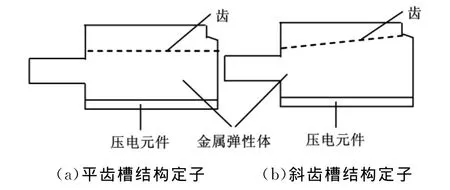
图3 双定子-双转子型超声波电机原理样机

表1 电机定子结构参数
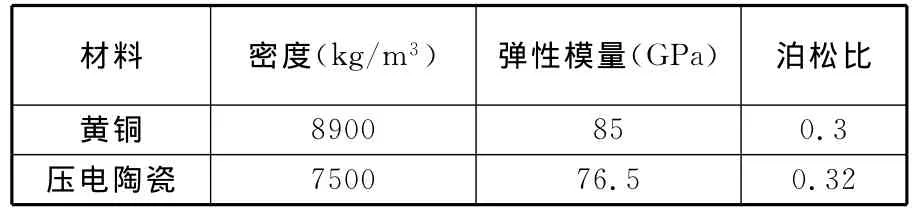
表2 电机定子材料参数
4.1 电机阻抗特性和等效参数测试
为测试电机两定子结构的一致性,采用PV50A阻抗分析仪对电机两个定子的等效参数和阻抗特性进行实验(本文以1号电机为例进行验证说明),通过计算机控制阻抗分析仪自动扫描和处理完成整个实验,得到电机定子的阻抗特性曲线和等效参数结果,如表3所示。
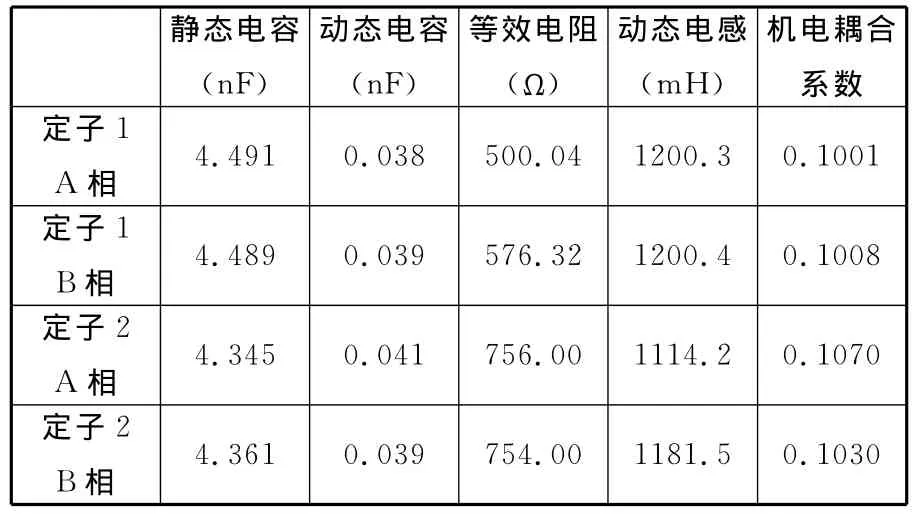
表3 定子等效参数实验结果
由表3可知,电机定子1和2的A、B两相等效参数(如电容、电阻、电感和机电耦合系数等)基本一致,误差控制在±10%以内。
调谐后新型电机两个定子在自由状态下的阻抗特性实验结果如图4所示。由图4可知,电机定子1的A相和B相的谐振频率分别为23.41kHz和23.40kHz,定子1两相谐振频率的差值为10Hz;定子2的A相和B相的谐振频率分别为23.44kHz和23.45kHz,定子2两相谐振频率相差也为10Hz。此外,两定子在自由状态下的谐振频率很接近,最大相差仅50Hz,达到工程应用上对两相工作模态频率之差不超过100Hz的要求。
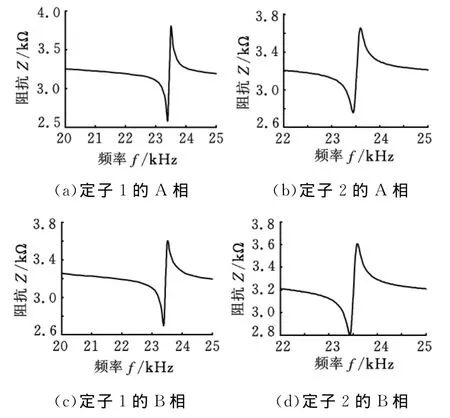
图4 电机定子自由状态阻抗特性实验结果
表3和图4的实验结果说明,电机两个定子的静态性能达到了一致,符合工程应用设计要求。
4.2 电机机械特性测试
图5所示为1号双定子-双转子行波型超声波电机在驱动电压Up-p=370V(有效值为130V)、预压力F=175N作用下,力矩-速度和力矩-效率特性随驱动频率f变化的实验结果。从图5可以看出,电机的最高转速达到87r/min、堵转力矩达到0.7N·m、最大输出效率为24.5%。与单定子-单转子电机的机械特性(图6)相比较,电机的堵转力矩明显地增大了,但是电机的堵转力矩并没有和理论计算那样达到单定子-单转子电机的两倍,且最高转速和输出效率均有一定的下降。原因主要有:①尽管新型电机两个定子的静态性能基本对称一致,但由于装配过程中难以保证两个定子和转子完全对称,特别是转子与定子接触面之间的加压不均匀以及转子与输出轴不同心,容易使电机两个定子的输出性能不对称,导致电机转速下降;②由于新型电机采用一个驱动电源驱动两个电机定子,而单定子-单转子电机是采用一个驱动电源驱动一个电机定子,在同样的电源输出功率下,新型电机电源所驱动的负载增加了一倍,这必然使得双定子-双转子型电机的转速和效率下降;③由于新型电机定子采用平齿槽结构,受到定子支撑结构的约束,使得电机齿面内圈和外圈的质点振动幅值不均匀,外圈质点振动幅值大,内圈质点振动幅值小,两者之间产生了相对速度滑差,导致电机的机械性能下降。
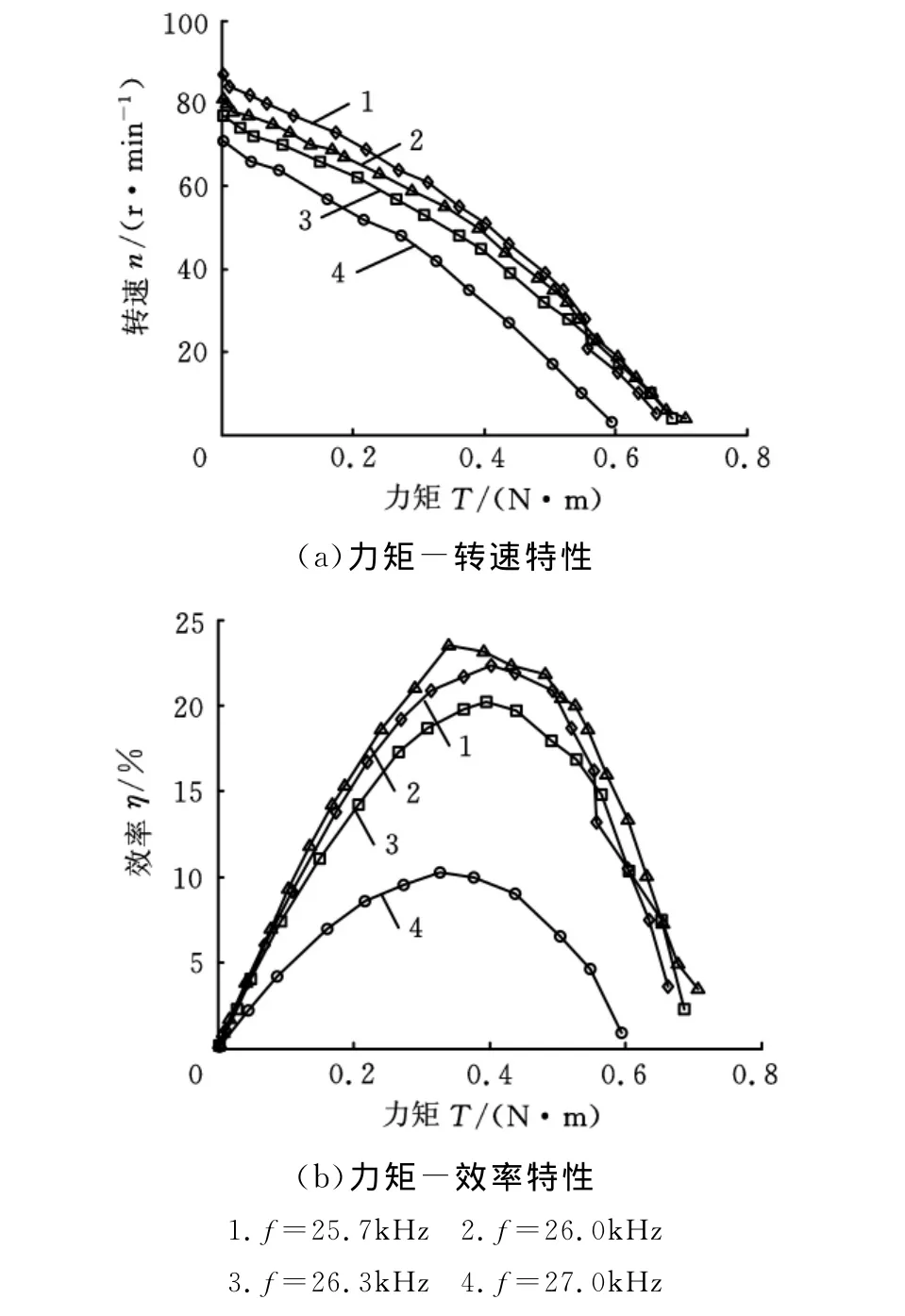
图5 1号电机的机械特性实验结果
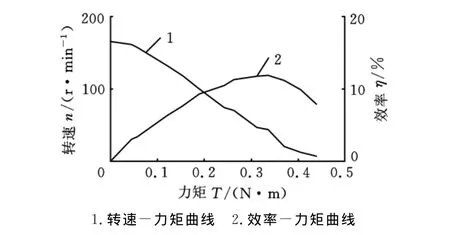
图6 单定子-单转子电机机械特性
图7所示为2号双定子-双转子电机(自由状态下定子谐振频率为27.349kHz)在驱动电压Up-p=370V(有效值为130V)、预压力F=175N作用下时测得的机械特性曲线随驱动频率的变化情况,可以看出电机的最大空载转速为40r/min,堵转力矩为0.7N·m,输出效率仅为6%。显然电机的机械特性输出并没达到最佳,其原因是预压力没有调节到最佳。
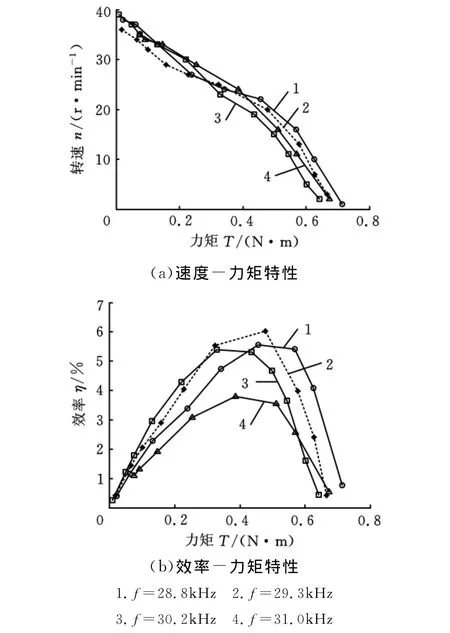
图7 2号电机的机械特性实验结果
图8是在图7的基础上,通过改变电机的预压力测得的电机机械特性曲线,此时驱动电压Up-p=370V(有效值为130V)、驱动频率f=31kHz。从图8可以看出,增大预压力,电机的空载转速、堵转力矩和输出效率都有明显的提高,其中最大空载转速接近100r/min,堵转力矩高达1.1N·m,输出效率接近20%。电机输出力矩是同型号的单定子-单转子电机输出力矩的2倍。图8a中,预压力F=300N时,通过阻抗分析仪测得电机的工作频率为31.2kHz,而驱动电源的驱动频率为31kHz,与电机的工作频率接近,电机处于谐振工作状态,电机的输出转速和力矩达到最大。而在F=220N、260N和280N时,电机的工作频率均小于31.2kHz,与电源的驱动频率相差较大,电机没有工作在谐振状态,其输出性能较F=300N时有所下降。可见,合适的预压力可以大幅提高电机的输出性能。
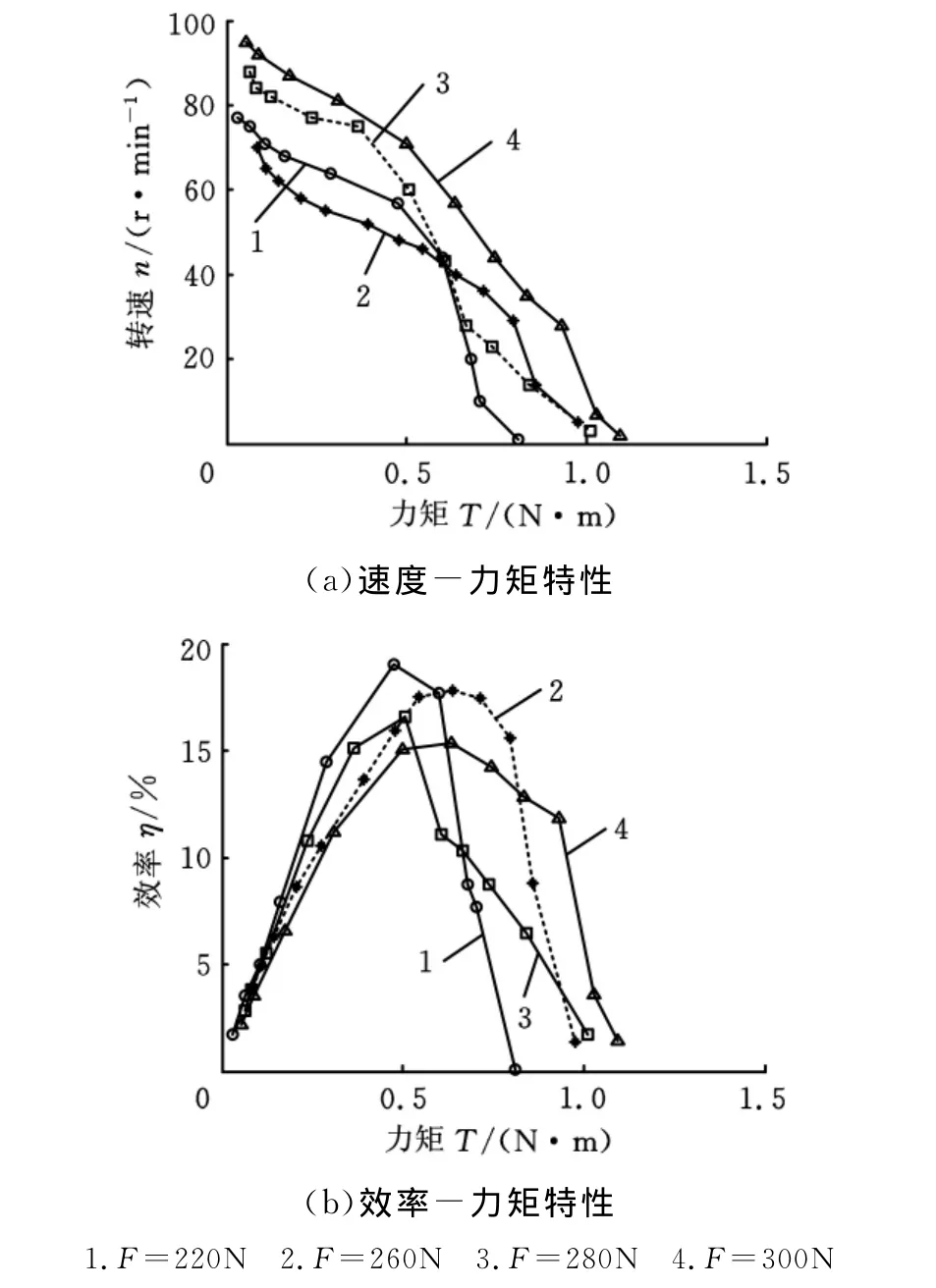
图8 2号电机不同预压力下的机械特性实验结果
图9所示为3号双定子-双转子电机(自由状态下定子谐振频率为28.018kHz)在驱动电压Up-p=580V(有效值为200V)、预压力F=260N作用下的机械特性随驱动频率变化的实验结果。由图9可知,电机的最大空载转速为65r/min,堵转力矩为1.1N·m,输出效率为17.5%。与2号电机相比,3号电机的空载转速有所下降,这是由于3号电机两个定子的加工尺寸不一致,使得两个电机的谐振频率不完全相同,在相同频率的激励下,两个定子产生的振动幅值不一样,它们的输出转速不同,其中输出转速较快的受到较慢转速定子的影响,转速降低,因此,电机的合成输出转速降低。但是,3号电机的最大输出力矩达到1.1N·m,是同型号单定子-单转子电机最大输出力矩的2倍。

图9 3号电机的机械特性实验结果
由图4~图9的实验结果还可发现,预压力对电机工作频率影响较大,图4所示为平齿槽电机定子在自由状态(未加预压力)下的阻抗特性曲线,可以看出自由定子的工作频率为23.5kHz,而加预压力后,电机的工作频率范围在25.7~27kHz,较未加预压力时的工作频率增加近10%;而图7和图9中的实验频率均比自由状态下的电机工作频率高,这主要是由于预压力的增大,使得电机定子的弹性刚度增大了,由文献[9-11]的初等结构摄动理论可知,刚度的增大会使电机的工作频率变大。因此,为使电机的输出性能达到最佳,在调节预压力的同时,必须调节电机驱动电源的驱动频率,使其与电机的工作频率相接近,保证电机工作在谐振状态。此外,采用斜齿槽结构定子的输出力矩要比平齿槽结构定子的输出力矩大,这主要是斜齿槽结构提高了电机定子齿面质点振动幅值的均匀性,减小了电机定子内圈和外圈质点的相对速度滑差,使得输出力矩增大。
5 结论
(1)理论和实验证明了双定子—双转子型超声波电机的输出力矩是传统同型号单定子—单转子超声波电机的两倍。
(2)采用基于初等结构摄动理论的定子结构修改法对定子工作频率的调谐是有效的。
(3)采用双定子—双转子结构能够有效提高超声波电机的输出力矩,但该结构制作工艺和设计要求较高,必须保证两个定子的结构尺寸和性能尽量一致。
(4)为使电机的输出性能达到最佳,在调节预压力的同时,必须调节电机驱动电源的驱动频率,使其与电机的工作频率相接近,保证电机工作在谐振状态。
(5)采用斜齿槽结构定子的电机的输出力矩要比平齿槽结构定子的电机的输出力矩大,斜齿槽结构有利于电机定子齿面质点振动幅值的均匀性,减小电机定子内圈和外圈质点的相对速度滑差,提高输出力矩。
[1]Anon.Nanomotion Motors- HR Series Motors[EB/OL].[2011-05-12].http://www.nanomotion.com.
[2]Wakai T,Kurosawa M K,Higuchi T.Transducer for an Ultrasonic Linear Motor with Flexible Driving Part[C]//IEEE Ultrasonic Symposium.Sendai,1998:683-686.
[3]Mracek M,Hemsel T,Wallashek J.Parallel Operation of Ultrasonic Linear Motors[C]//The First International Workshop on Ultrasonic Motors and Actuators.Japan,2005:23-24.
[4]陈宇,刘欢庆,周铁英.大力矩行波超声电机的性能[J].清华大学学报(自然科学版),2006,46(3):396-398.
[5]李华峰,辜承林.大转矩行波型超声波电机的研制[J].中国电机工程学报,2002,22(8):67-70.
[6]张焱,胡敏强,宋爱国,等.一种改进型共轴并联式超声波电机设计[J].微电机,2010,43(2):37-40.
[7]郭吉丰,伍建国.航天用大力矩高精度超声波电机研究[J].宇航学报,2004,25(1):70-76.
[8]王光庆.行波型超声波电机若干关键问题研究[D].杭州:浙江大学,2006.
[9]Thomson W T.Theory of Vibration with Application[M].New Jersey:Prentice-Hall Inc.,1981.
[10]方同,薛璞.振动理论及应用[M].西安:西北工业出版社,1998.
[11]赵淳生.超声电机技术与应用[M].北京:科学出版社,2007.
[12]张健滔,朱华,赵淳生.行波型杆式超声电机模态频率调节[J].中国电机工程学报,2010,30(6):83-87.
