新型并联式混合动力汽车模式切换协调控制
2012-12-03秦大同段志辉
杜 波 秦大同 段志辉 叶 心
1.重庆大学机械传动国家重点实验室,重庆,400030
2.重庆长安新能源汽车有限公司,重庆,401120
0 引言
并联式混合动力汽车通过动力耦合机构将发动机和电动机两动力源集成在一起,使得车辆具备多种工作模式,并能实现驱动模式之间的灵活切换。因此,整车能量管理策略的制定、车辆工作模式切换的平稳过渡控制成为了一项复杂的工作[1-2]。
目前,综合能量管理策略和协调控制算法已成为研究的重要方向。童毅等[3]对并联式混合动力汽车转矩管理策略和协调控制算法进行了研究,但只针对离合器接合、变速器在挡的情况,具有一定的局限性。古艳春等[4]采用了基于逻辑门限值的能量管理策略,并对混合动力汽车起步和换挡过程的扭矩协调控制策略进行了仿真研究。基于逻辑门限值的控制策略只凭借人的直观判断在发动机万有特性图上划分出工作模式区域,缺乏理论依据,没有真正实现控制的最优化。戴一凡等[5]采用了基于优化发动机效率曲线的能量管理策略,但只对纯电动行进中启动发动机过程的协调控制进行了研究。以上研究采用了简单的逻辑门限值控制策略,侧重于发动机局部最优,并且只对部分工作模式切换的协调控制进行了研究。
本文以系统效率最优为目标,对基于行星齿轮机构的新型并联式混合动力系统工作模式区域进行划分,并制定出相应的能量分配策略,同时,对驱动工况下不同类型工作模式之间切换的扭矩协调控制算法进行研究,以实现系统效率最优和模式切换过程动力传递的平稳性。
1 新型并联式混合动力系统结构
本文研究的新型并联式混合动力系统结构如图1所示。系统中发动机输出轴同时与单向离合器、湿式离合器主动盘、行星齿轮机构的齿圈相连,电机既可作为发电机又可作为电动机,电机转子与湿式离合器从动盘和行星齿轮机构的太阳轮相连,行星齿轮机构起动力合成与分解的作用,系统动力通过行星架输出,经变速器、主减速器传递至车轮。
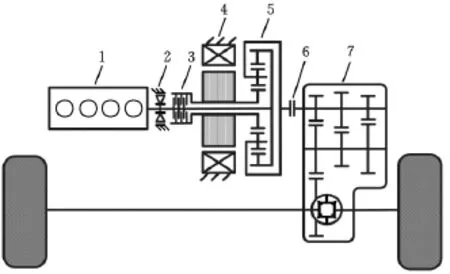
图1 新型混合动力汽车动力系统示意图
通过控制动力源和离合器元件的工作状态,该混合动力系统可实现多种工作模式,如表1所示。可看出,该混合动力系统可实现两种联合驱动方式:联合驱动a是在湿式离合器接合情况下,发动机和电动机以扭矩合成方式输出动力;联合驱动b是在湿式离合器分离情况下,发动机和电动机以转速合成、扭矩成比例方式输出动力。

表1 新型混合动力系统工作模式
2 基于系统效率最优的能量管理策略
2.1 基于系统效率最优的车辆工作模式区域划分
由于逻辑门限值控制策略的不足,本文从能量转化的角度,提出一种基于系统效率最优的混合动力工作模式区域划分方法,其核心思想是油电转换效率ηe_b和各工作模式下系统效率ηsys的计算。
本文将油电转换效率ηe_b定义为行车充电工况下充入到电池的电能Pb与发动机用于充电所消耗的燃料化学能P′e-Pe之比:

式中,Pb为存储到电池的电能;P′e为行车充电工况所消耗的化学能;Pe为相同需求转矩和转速下发动机单独驱动所消耗的化学能;ng、Tg分别为发电机转速和转矩;ne、Te分别为发动机转速和转矩;Treq为变速器输入端的需求转矩;ηe为发动机驱动下的发动机效率;η′e为行车充电工况下的发动机效率;ηg为电机发电效率;ηchar为电池充电效率。
在已知需求转矩、转速情况下,在工作区域内寻求最优的发电机转矩,使得油电转化效率最高,并将油电转化效率值较高的区域确定为行车充电区域。
其次,在已知需求转矩、转速的条件下,分别计算混合动力系统在纯电动驱动、发动机单独驱动、联合驱动a和联合驱动b工作模式下的系统效率。将系统效率定义为需求功率Preq与系统总功率Pb/ηe-b+P′e之比:

式中,Preq为整车需求功率;P′e为联合驱动工况下发动机所消耗的功率,当P′e=0时对应于纯电动工作模式;nc为变速器输入端的需求转速;nm、Tm分别为电动机转速和转矩;ηm为电动机效率;ηdis为电池放电效率;n′e、T′e分别为联合驱动工况下发动机的转速和转矩;η′e为联合驱动工况下的发动机效率。
将计算所得的各工作模式下的系统效率曲面进行比较,并在转速转矩平面上投影,从而划分出混合动力系统各个工作模式的最优工作区域,如图2所示。图中,n1、T1分别为纯电动区域转速上限和转矩上限,T2为行车充电区域扭矩上限,T3为发动机单独驱动区域扭矩上限,n2为联合驱动a区域转速上限。
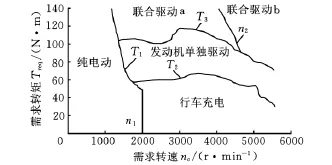
图2 混合动力系统工作模式区域划分
2.2 能量分配策略
根据图2中基于系统效率最优的工作模式区域划分,制定出混合动力系统各工作模式区域的边界条件以及动力源能量分配策略,如表2所示。表2中,SOC、SOClow、SOChigh分别为蓄电池的荷电量、最低荷电量、最高荷电量;β为齿圈与太阳轮齿数比;Tef为发动机启动阻力矩。

表2 混合动力系统能量分配策略
3 模式切换协调控制算法
为满足整车动力性、经济性的要求,混合动力系统工作模式会随着车辆行驶状态变化而变化,存在着各模式之间的切换。混合动力系统模式切换可能引起发动机和电机转速转矩的大幅度变化,然而由于发动机和电机具有不同的动态特性,在从当前扭矩向目标扭矩变化的过程中,若不能很好地跟随目标扭矩,就会引起输出扭矩产生大的波动[6]。除此之外,湿式离合器接合或分离引起行星齿轮机构自由度发生变化,也会造成输出转速转矩的波动,影响整车行驶的平稳性。因此,需要对两动力源和湿式离合器进行协调控制。限于篇幅,本文重点对驱动工况下各工作模式切换的协调控制问题进行研究。
3.1 模式切换分类
根据新型并联式混合动力系统的结构形式、模式切换的相似性以及工作模式区域划分,可将各种工作模式之间的切换分成三类,如图3所示。
在图3中,编号①表示第一类模式切换,包括纯电动⇒(发动机单独驱动/联合驱动a/行车充电),该类模式切换的特点是存在发动机启动、湿式离合器接合的动态过程。
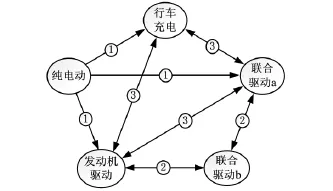
图3 混合动力系统驱动工况下模式切换分类
编号②表示第二类模式切换,包括联合驱动a⇔联合驱动b、发动机单独驱动⇔联合驱动b。该类模式切换的特点是发动机正常工作,存在湿式离合器接合或分离的动态过程。
编号③表示第三类模式切换,包括发动机驱动⇔联合驱动a、联合驱动a⇔行车充电、发动机驱动⇔行车充电。该类模式切换的特点是发动机正常工作,湿式离合器处于接合状态。
3.2 协调控制算法
3.2.1 第一类模式切换过程协调控制算法
由于混合动力系统结构的限制,从纯电动切换至有发动机参与工作的模式过程中,包括了电机启动发动机的中间过程。电动机一部分扭矩经行星齿轮机构输出,维持车辆行驶;另一部分扭矩通过湿式离合器的接合,提供发动机启动所需转矩。要求在0.4s内将发动转速拖动至点火转速800r/min以上,并完成发动机启动。该过程中需要对湿式离合器传递的扭矩和电机扭矩进行协调控制,以保证发动机启动时不会对车辆正常行驶造成过大的冲击。
当离合器结构参数确定以后,湿式离合器传递的扭矩主要取决于离合器的工作压力。由于离合器接合过程有很强的非线性,很难用准确的数学模型来表达,因而设计模糊控制器来控制湿式离合器的接合压力[7-8],模糊控制器结构如图4所示。

图4 离合器接合过程模糊控制器

从而,离合器传递转矩的计算公式为

式中,μ为摩擦片的摩擦因数;z为离合器的摩擦面数;Ap为活塞作用面积;pin为油缸控制压力;pbase为回位弹簧压力;Rm为摩擦片的等效摩擦半径;Ri、Ro分别为离合器片的内外半径;ωe、ωm分别为发动机和电动机的角速度。
该类模式切换过程中,除了对离合器接合压力进行控制外,同时还需要对电机扭矩进行控制。电机的目标扭矩与驾驶员需求扭矩、离合器传递扭矩和发动机阻力矩有关,在电机启动发动机的不同阶段,电机的目标扭矩值有所不同,具体如下:
(1)当车辆纯电动行驶时,发动机与其固接的行星齿轮内齿圈由于单向离合器的作用而锁止,电机扭矩通过与其固接的太阳轮经行星架输出以驱动车辆行驶。此时,电机目标扭矩为

式中,Tm_tar为电机目标扭矩;Jm为电机等效转动惯量。
(2)当控制器发出模式切换指令后,离合器开始接合,其接合初始阶段传递的扭矩Tcl小于发动机的启动阻力矩Tef,发动机不转。此阶段电机扭矩增加,其目标扭矩为

式中,Tm_max为电机最大扭矩;Je为发动机的等效转动惯量。
(3)当Tcl≥Tef时,发动机开始启动,离合器压力继续上升,电机扭矩相应增大,其目标扭矩值为

式中,ωc为变速器输入轴角速度。
(4)当发动机转速ne>800r/min时,发动机点火启动,但此时发动机输出扭矩比较小,采用电机进行扭矩补偿,其补偿扭矩为

(5)当|ne-nm|<50r/min时,离合器快速接合,电机和发动机以扭矩合成方式输出动力,电机目标扭矩为

当离合器完全接合,发动机运行平稳以后,根据需求扭矩确定电机的工作状态。
3.2.2 第二类模式切换过程协调控制算法
在第二类模式切换中,联合驱动a⇒联合驱动b、发动机单独驱动⇒联合驱动b的模式切换中应快速分离离合器,避免滑摩损失。在发动机和电机两动力源向各自的目标状态过渡的过程中,可利用发动机、电机和变速器输入轴三者之间的转速关系,并结合电机和需求扭矩的关系,控制电机转矩以保证变速器输入端扭矩平稳过渡,具体步骤如下:
(1)根据系统效率最优确定发动机目标转速。
(2)由发动机目标转速和变速器输入端转速确定电机目标转速:

(3)调节电机转矩,以满足需求扭矩:

联合驱动b⇒联合驱动a、联合驱动b⇒发动机单独驱动的模式切换包括了离合器接合动态过程,仍采用模糊控制器控制离合器接合压力。发动机和电机扭矩变化与第一类模式切换过程中发动机启动以后的相似,这里不再赘述。
3.2.3 第三类模式切换过程协调控制算法
此类模式切换过程中离合器处于接合状态,如果将发动机和电机看作一整体,发动机和电机转矩的变化只是系统动力源的内部分配协调过程。由于发动机动态响应较慢、难以控制,电机响应较快、易于控制,故可直接利用电机对发动机转矩进行实时补偿,以减小因发动机转矩变化过大而引起的转矩波动。
该类模式切换过程的协调控制算法如图5所示,当需要进行模式切换时,发动机按照限制了的节气门变化率从当前节气门开度变化到目标节气门开度,经发动机转速估计出发动机转矩值,将该值与驾驶员需求转矩进行比较,其差值由电机转矩实时补偿。
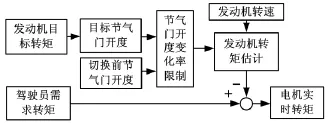
图5 第三类模式切换协调控制算法
该协调控制算法能够实现的关键在于发动机实时转矩的准确估计,由于模式切换过程时间短,车速几乎不变,当发动机节气门开度变化率小于100%时,采用发动机稳态输出特性在时间上进行一定延时的方法估计发动机动态转矩,具有较高的估计精度[9]。这样就把发动机的动态过程变成一系列准静态过程,便于发动机转矩估计。
3.3 模式切换控制流程
根据以上制定的能量管理策略和模式切换协调控制算法,归纳出新型并联式混合动力汽车协调控制策略总体流程,如图6所示,图中,Td为驱动需求转矩;Tb为制动需求转矩。

图6 模式切换协调控制总体流程图
4 仿真及结果分析
为了验证本文所提出的协调控制策略,在MATLAB/Simulink和 MATLAB/Stateflow 平台上建立了前向式混合动力系统动态仿真模型,对混合动力系统进行了驱动工况下的仿真分析。
图7和图8所示分别为采用协调控制策略和未采用协调控制策略的仿真结果。图7、图8中,j为冲击度,即汽车行驶过程中纵向加速度a的变化率,j=da/dt。可以看出,混合动力系统工作模式先后经历了纯电动⇒行进中启动发动机⇒发动机驱动⇒行车充电⇒联合驱动a⇒联合驱动b⇒发动机驱动的变化过程。
由图7和图8可以看出,在稳态工况下,输出扭矩都很好地跟随了驾驶员需求扭矩,而在模式切换动态过程中,区别则比较明显。在第一、二类各个模式切换过程中,图7中变速器输入扭矩Tc波动幅度值比图8中的小,说明采用了模糊控制对离合器接合进行控制,离合器接合过程更平稳,制定的扭矩协调控制策略能实现模式切换过程中动力传递的平稳过渡。在第三类模式切换过程中,当发动机扭矩发生突变时,发动机的扭矩变化受到一定的限制,变化缓慢,同时电机实时地对发动机扭矩进行补偿,能够较好地跟随驾驶员需求扭矩,减小了输出扭矩波动。而没有采用协调控制策略时,在动力源向目标值变化过程中发生突变,输出扭矩产生了较大幅度的波动,影响了整车行驶的平顺性。

图7 有协调控制的仿真结果

图8 无协调控制的仿真结果
根据驱动工况下的仿真结果,选择模式切换过程的扭矩波动幅值和冲击度作为协调控制效果好坏的评价指标[6],如表3所示。从表中的扭矩波动幅值和冲击度的对比可以看出,在相同类型的模式切换过程中,有协调控制的模式切换过程的转矩波动幅值和冲击度均比无协调控制的模式切换过程的转矩波动幅值和冲击度要小,说明本文提出的协调控制策略能有效提高模式切换过程的平顺性,减小输出扭矩的波动。

表3 模式切换仿真结果对比
5 结论
(1)提出了基于系统效率最优的能量分配策略,对混合动力系统工作模式区域进行了划分,与传统开关门限值控制策略相比,以理论计算为依据的工作模式划分更细。
(2)根据新型混合动力系统的结构特点和模式切换过程的相似性,将混合动力系统模式切换分为三类,并针对每类模式切换过程提出了相应的扭矩协调控制算法。
(3)进行了驱动工况下各工作模式切换的仿真分析,结果表明,本文所设计的模式切换协调控制算法可有效提高该新型混合动力汽车模式切换过程中动力传递的平稳性。
[1]Farzad R S.Control Strategies for Hybrid Electric Vehicles:Evolution,Classification,Comparison and Future Trends[J].IEEE Transactions on Vehicular Technology,2007,56(5):2393-2403.
[2]左义和,项昌乐,闫清东.基于功率跟随的混联混合动力汽车控制策略[J].农业机械学报,2009,40(12):23-29.
[3]童毅,欧阳明高,张俊智.并联式混合动力汽车控制算法的实时仿真研究[J].机械工程学报,2003,39(10):156-161.
[4]古艳春,殷承良,张建武.并联混合动力汽车扭矩协调控制策略仿真研究[J].系统仿真学报,2007,19(3):170-175.
[5]戴一凡,罗禹贡,边明远,等.单电机强混合动力车辆控制策略[J].中国机械工程,2010,21(7):120-124.
[6]王庆年,冀尔聪,王伟华.并联式混合动力汽车模式切换过程的协调控制[J].吉林大学学报,2008,38(1):1-6.
[7]Schouten N J,Salman M A,Kheir N A.Fuzzy Logic Control for Parallel Hybrid Vehicles[J].IEEE Transactions on Control Systems Technology,2002,10(3):460-468.
[8]邹乃威,刘金刚,周云山,等.混合动力汽车行星机构动力耦合器控制策略仿真[J].农业机械学报,2008,39(3):5-9.
[9]侯献军,杜常清,颜伏伍,等.混合动力系统状态切换技术研究[J].内燃机工程,2009,30(16):72-76.
